
Fターム[2B304QB15]の内容
農作業機用昇降装置 (9,026) | 検出量 (610) | 高さ、深さ (164) | 作業機、作業部の高さ (163) | 基準面からの高さ (75) | 耕耘深さ (44)
Fターム[2B304QB15]に分類される特許
1 - 20 / 44
代かき作業機の耕深表示装置
【課題】代かき作業時に耕深を一定にすることができ、耕深の確認時に走行機体の直進性が維持できる代かき作業機の耕深表示装置を提供する。
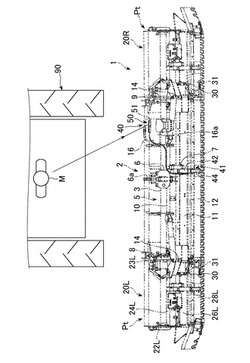
【解決手段】耕深表示装置40は、回転自在に支持された耕耘ロータの後方に上下方向に回動自在に配設された第1整地板11とこの後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備えて走行機体90に装着される代かき作業機1に搭載される。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され耕耘ロータの耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動するリンク機構部41と、この回動に応じて耕深を表示する耕深表示部50とを有する。耕深表示部50は、走行機体90に搭乗した作業者Mが代かき作業1に向かって斜め後方へ振り返ったときの作業者Mの視線の延長先に設けられる。
(もっと読む)
作業車両のエンジン負荷制御装置

【課題】作業時に過負荷がかかった場合において、作業形態に応じて減速割合を変更可能とし、負荷制御のモードを切換可能な作業車両のエンジン負荷制御装置を提供する。
【解決手段】作業車両のエンジン負荷制御装置において、エンジン負荷制御装置50は、エンジン回転数を設定エンジン回転数Xsに保つように、エンジン21が過負荷となった時の負荷に応じて、車速を増減し、又は作業機30を昇降する構成とし、負荷車速制御と負荷作業機昇降制御との制御優先順位を設定する制御実行順序設定手段52を備える。
(もっと読む)
代かき作業機の耕深表示装置
【課題】代かき作業時に耕深を一定にすることができる耕深表示装置を提供する。
【解決手段】耕深表示装置40は、機体5に回転自在に支持された耕耘ロータ13の上部を覆うシールドカバー13と、この後部に上下方向に回動自在に配設されて耕耘ロータ13により耕耘された耕土を整地する第1整地板11と、この後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備える代かき作業機1に設けられる。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され、耕耘ロータ13により耕耘された耕土の耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動自在な揺動アーム42と、揺動アーム42の回動に応じて耕深を表示する耕深表示部50とを有してなる。
(もっと読む)
作業車両
【課題】作業機の圃場での作業深さの表示又は制御を低コストで行うことが可能な作業車両を提供することを課題としている。
【解決手段】本発明は、走行機体2に連結された作業機4を昇降させるリストアーム22を該走行機体2に設け、該作業機4の圃場での作業深さの表示又は制御を行う制御部32を備えた作業車両であって、前記リストアーム22のリフト角αを検出するリフト角検出手段33を備え、リフトアーム22のリフト角α情報及び該リフト角αとなる場合の作業機4の対地高さH情報からなるデータセットを、少なくとも2組以上、予め制御部32に記憶し、該制御部32は、前記2組以上のデータセットから、該作業機4におけるリフト角αと対地高さHの相関関係を求め、該相関関係に基づき、リフト角検出手段33からの検出値から、該作業機4の圃場での作業深さDを算出する。
(もっと読む)
トラクタの作業機掘り深さ自動制御装置
【課題】本発明では、地面を掘りながら進行する作業機を牽引したトラクタの作業機掘り深さ自動制御装置において、掘り深さを自動的に設定深さに維持するに、設定掘り深さを浅くしても外乱要素によって作業機が頻繁に昇降しないように制御することを課題とする。
【解決手段】トラクタ1で牽引する作業機2の対地掘り深さHを適宜の設定対地掘り深さH0に設定し、実際の対地掘り深さHが設定対地掘り深さH0の許容振れ幅Kからずれても一定の猶予時間Tだけそのずれを放置するよう制御し、設定対地掘り深さH0が浅い場合には深い場合よりも猶予時間Tを長くして、猶予時間Tの経過後に作業機2の位置を設定対地掘り深さH0に修正するように制御したことを特徴とするトラクタの作業機掘り深さ自動制御装置とした。
(もっと読む)
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
トラクタの作業機昇降制御装置
【課題】負荷率に応じて目標耕深を補正するにあたり、耕耘深さの急激な変化を回避すると共に、負荷率の回復を早めて耕深制御への復帰を促す。
【解決手段】耕深自動制御中に、エンジンENGの負荷率Lが所定値Iを超えたとき、目標耕深を補正してエンジンストールを防止する目標耕深補正手段を備えるトラクタの制御部20において、エンジンENGの負荷率Lが所定値Iを超えたとき、目標とする負荷率Hと現在の負荷率Lとの偏差に比例する比例制御量Tを算出すると共に、該比例制御量Tと前回の補正値Eとの差分Dを積分して目標耕深の補正値Eを決定するにあたり、負荷率Lの減少が見られないときは、それまでの積分値Kに差分Dを加算して補正値Eを決定し、負荷率Lの減少が見られるときは、それまでの積分値Kから差分Dを減算して補正値Eを決定する。
(もっと読む)
耕深情報取得装置及びトラクタ
【課題】ロータリ作業機の傾き量を加味して、耕耘深度に関する情報を精度良く取得する。
【解決手段】揺動レーキ66、スプロケット78a,78b及びローラチェーン80が地面からの鉛直方向高さ位置の変化に応じて回転軸76aを回転し、ポテンショメータ74が、回転軸76aの回転量に関する情報を検出し、振り子部材72が、ロータリ作業機の地面に対する姿勢変化に関わらず、ポテンショメータ74の鉛直方向に対する姿勢を維持する。これにより、ポテンショメータで検出される回転軸の回転量に関する情報に、高さ位置の変化分のみならず、ロータリ作業機の地面に対する傾き量分も含めることができる。
(もっと読む)
トラクタ
【課題】本発明は、作業中に牽引負荷が所定限界値になるまでに牽引負荷の軽減制御を行うことで負荷の急激な増加を防ぎ、作業機やトラクタの破損を避ける技術を提供することが課題である。
【解決手段】耕耘或いは耕起作業等を行う作業機30を昇降可能に装着したトラクタ10において、牽引負荷を検出する牽引負荷検出手段21を設け、牽引負荷が所定の第一限界負荷値G1を超えると掘り下げを中止してその掘り深さを維持し、さらに第二限界負荷値G2を超えると作業機30を上昇させるようにしたことを特徴とするトラクタとした。また、第二限界負荷値G2を超えて作業機30を上昇させるにあたり、段階的に上昇させるように構成したことを特徴とするトラクタとする。また、トラクタ前記第二限界負荷値G2を超えて作業機30を上昇させるにあたり、牽引負荷の増加率が一定値以上の場合に段階的に上昇させるように構成したことを特徴とするトラクタとする。
(もっと読む)
農作業機
【課題】耕耘体の耕耘深さを容易に目視確認できる農作業機を提供する。
【解決手段】農作業機1は、トラクタTに連結する機体2を備える。機体2には、耕耘作業をする耕耘体11を設ける。機体2には、耕耘体11の上方部を覆うカバー体16を設ける。カバー体16の後端部には、耕耘体11の後方で整地作業をする整地体21を設ける。カバー体16の前端部には、トラクタTに乗った作業者が耕耘体11の耕耘深さAを目視確認するための目印手段31を設ける。目印手段31は、左右方向に並んで位置しそれぞれの下端が異なる高さに位置する複数の目印部36を有する。
(もっと読む)
トラクタ
【課題】ロータリ耕耘装置の強制昇降時にはエンジンストールを招くことなくエンジンの回転速度を変更し得るトラクタを構成する。
【解決手段】ロータリ耕耘装置の強制上昇制御時には、遅延時間設定ダイヤル41で設定されている第1遅延時間が経過した後に回転速度変更手段52がエンジンEの回転速度を減ずる減速制御を行い、この上昇状態において強制下降制御を行う際には、回転速度変更手段52がエンジンの回転速度を復帰させる復帰制御を行い、強制下降制御を開始するタイミングで復帰制御を開始し、この後、遅延時間設定ダイヤル41で第1遅延時間とともに設定される第2遅延時間が経過した後にロータリ耕耘装置の強制下降制御を開始する。
(もっと読む)
耕耘装置のリヤカバロック警報装置
【課題】耕耘装置のリヤカバーの上下動によって、この耕耘装置を車体に対して昇降して自動耕深制御を行わせる形態にあっては、前記リヤカバーの下動を規制することが多くあり、このリヤカバーの下動が規制されてロック状態にあるときは、このまま作業を行うことになるとロータリ耕耘装置が変形されたり、破損され易くなる。
【解決手段】トラクタ車体の後部に対してリフトアームにより昇降可能のロータリ耕耘装置に、この耕耘爪によって耕耘された土壌面を鎮圧均平するリヤカバーを設け、このリヤカバーの上下揺動によって耕耘装置を昇降して一定の耕深を維持制御する構成とし、前記リフトアームの下動によって耕耘装置を下降して前進走行したとき、リヤカバーの角度を検出するリヤカバセンサ7の入力によって、このリヤカバセンサ7が下り角を検出しているときは、リヤカバロック状態として警報する。
(もっと読む)
耕深測定装置及び方法、並びにトラクタ
【課題】高精度かつ適切なタイミングで耕深測定を行う。
【解決手段】ロータリ作業機の水平面に対する傾斜量θから求められる、ポテンショメータの取り付け位置aからロータリ作業機の最下点までの鉛直方向に関する距離(β+γ)と、未耕起圃場の表面において、ポテンショメータにより検出される高さαと、を用いて、ロータリ作業機の耕深Lを算出するので、耕耘後の圃場表面の高さから耕深量を算出するような場合よりも、適切なタイミングで耕深Lを算出することができるとともに、ロータリ作業機の傾斜量θも考慮して耕深を算出することで、高精度に耕深Lを算出することができる。
(もっと読む)
農用トラクタ
【課題】本発明の課題は、リヤカバーの感度切替を本機側から簡単に行えるようにして、作業の効率化を図る。
【解決手段】ロータリ作業機の後部に枢着されたリヤカバー14の上下揺動変位を検出するオートケーブル16と、本機側に設置されていてオートケーブル16の移動位置変更によってリヤカバーの揺動変位を設定するケーブル支持アーム17と、前記ポジションレバー20位置近くに設けられていて前記ケーブル支持アーム17を位置変更して耕深量を設定調節するオートレバー21とを備え、このオートレバー21とケーブル支持アーム17及び前記ポジションリンクアーム10との間にはリヤカバー14の感度切替手段Aを設けてあることを特徴とする農用トラクタの構成とする。
(もっと読む)
トラクタ
【課題】耕深を維持するための適正な車速、又は車速を維持するための適正な耕深を容易に認識可能とする。
【解決手段】コモンレールを備えたエンジンと該エンジンの制御を行うECU、及び作業機を搭載したトラクタにおいて、該作業機により耕す深さを設定する耕深設定手段、該耕深設定手段の機能を入り状態とする自動耕深スイッチ、該自動耕深スイッチが入り状態のときに耕深優先又は車速優先を選択する選択スイッチを設け、前記自動耕深スイッチが入り状態のときに前記選択スイッチにより耕深優先又は車速優先のいずれか一方が選択された状態で作業機を駆動して作業走行が開始されると、前記ECUは負荷率を検出して本機側の制御装置に送信し、該制御装置は耕深を維持するための車速、又は車速を維持するための耕深を算出してモニターに表示することを特徴とするトラクタの構成とする。
(もっと読む)
農業用トラクタ
【課題】農業用トラクタの旋回制御の各種設定操作の繁雑さを解消する。
【解決手段】
ロータリ作業機Rを昇降する作業機昇降装置25と、該作業機昇降装置25を制御する作業機昇降制御手段C1と、車体の走行形態を「二駆」状態若しくは「四駆」状態に切り替える前輪駆動切替装置3と、該前輪駆動切替装置3の切り替え状態を制御する走行制御手段C2を設け、設定ポジションを走行ポジションP1と耕耘ポジションP4とに切り替える設定器9を設け、耕耘ポジションP4では、前記車体の走行形態を「四駆」状態とし、且つ前記作業機昇降制御を入りに設定する農業用トラクタにおいて、前輪増速制御、オートリフト制御またはオートブレーキ制御を夫れ夫れ単独で選択できる設定具を設け、前記設定器9を前記耕耘ポジションP4に操作すると、該設定具により選択設定された前輪増速制御、オートリフト制御、又はオートブレーキ制御を強制的に入とする。
(もっと読む)
代掻き砕土装置の耕深確認ゲージ
【課題】 代掻き作業時に走行車の運転者が容易に代掻き装置のロータリー作業部の耕深を確認できるとともに安価に製造可能な装置を提供する。
【解決手段】 代掻き砕土装置において、ロータリー作業体の上部を覆うローターカバーの前端部に、ロータリー作業体の上下方向位置を目視確認できる耕深確認ゲージを設けた。耕深確認ゲージの進行方向前面は、上方から下方に行くに従い後方に後退させた形状で、且つ目視確認は耕深確認ゲージ本体に設けた切り欠き部又は切り欠き孔で表示した目盛りで行う。
(もっと読む)
作業車の前輪増速駆動装置
【課題】前輪増速装置を装備した作業車において、旋回時に作業機上昇と前輪増速が同時に作動してしまい、圃場端の耕耘の終了部が斜めになることがあった。
【解決手段】ステアリングハンドル57の回動角を検知する手段と、作業機昇降制御手段と、前輪増速切換手段と、これらの制御手段を備え、ステアリングハンドル57を直進位置から設定角度以上切ると、作業機を上昇させ、前輪を増速駆動するようにした作業車において、前記作業機の上昇動作と前輪を増速駆動する動作との間に所定の時間差を設けた。
(もっと読む)
耕深制御装置
【課題】検出耕深位置と設定耕深位置との偏差の大小に拘わらず、耕耘機の昇降制御の安定化を図り得る耕深制御装置、及び持続的な外乱の入力があった場合であっても、耕耘機の昇降制御の安定化を図り得る構造簡単な耕深制御装置を提供する。
【解決手段】リヤカバー624の回動角度に基づき、車輌本体50に対して昇降可能に連結された耕耘機400の検出耕深位置hDを設定耕深位置hRに追従させる自動耕深制御を行うように構成された耕深制御装置は、検出耕深位置hDと設定耕深位置hRとの偏差Δhの大きさに基づき自動耕深制御における制御ゲインKpを変更するように構成されている。
(もっと読む)
姿勢制御装置
【課題】車輌本体の連結された一の耕耘機を他の耕耘機に取り替えた場合であっても、該他の耕耘機の位置制御を良好に行える姿勢制御装置を提供する。
【解決手段】位置制御を司る制御手段に種別の異なる耕耘機毎の制御条件を記憶させておき、耕耘リヤカバーが耕耘爪の回動軌跡に最も近づいた状態での該耕耘リヤカバーの最閉回動角度に基づいて当該耕耘機の種別を判別し、予め記憶されている前記制御条件のうち判別された当該耕耘機用の制御条件を用いて位置制御を行う。
(もっと読む)
1 - 20 / 44
[ Back to top ]