
Fターム[2B304QC01]の内容
Fターム[2B304QC01]の下位に属するFターム
Fターム[2B304QC01]に分類される特許
1 - 10 / 10
乗用移植機
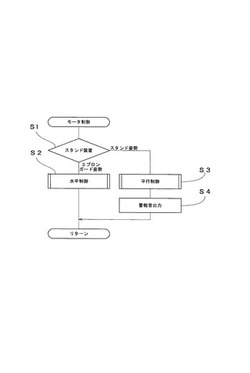
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
苗移植機

【課題】
苗載せ台を畦際側とは反対側へ移動させるときは、苗植機の走行を直ちに停止して、植付装置の植付操作を停止して、苗タンクを目的の方向へ大きく移動させて、苗移植機の旋回操作等を行わせる。又、この一旦横端へ移動させていた苗タンクを移動前の苗植付停止位置に戻してから、苗移植機の植付動作を行わせる必要があり、煩雑で正確な操作を要し、相当の時間と熟練を要する。
【解決手段】
植付装置3の伝動を停止した状態で苗タンク2を横端へ移動させるときの、摺動軸1の横送回転数をタンク送りセンサ6で検出し、この苗タンク2が横端に移動した後に前記苗植作用を開始するときは、前記タンク送りセンサ6が検出した横送回転数に基づいて摺動軸1を伝動回転して、前回苗植停止位置に苗タンク2を移動復帰する構成とする。
(もっと読む)
苗移植機
【課題】
機体の走行により圃場の面積を算出し、算出した面積から苗の植付作業の進捗具合、苗や施肥肥料の使用量、作業に要する時間等を算出可能な苗移植機を提供する。
【解決手段】
後輪2,2の駆動回転を検出する回転検出部材1を設け、回転検出部材1が検出する後輪2,2の回転数から走行距離を算出する走行車体3に苗植装置4を設けた苗移植機において、回転検出部材1の検出結果と、走行車体3の前側に設ける前輪5,5の操向旋回を検出する操向検出部材6の検出結果によって、各植付走行条の走行距離Bと、植付走行条の端部での折返旋回距離Cを算出し、走行距離Bと折返旋回距離Cから苗植付条面積Eを算出する構成とする。
(もっと読む)
苗移植機
【課題】 旋回時、植え付け装置を機械的に自動上昇させる、安価な苗移植機の実現。
【解決手段】 走行車体2の車輪10の方向を制御するピットマンアーム60と、走行車体2の後側に設けられ、昇降油圧シリンダによって昇降させられる植え付け装置と、植え付け装置の昇降、植え付けを設定するための植え付け昇降レバー33と、昇降レバー33の操作に従って、昇降油圧シリンダを制御するカム74、位置決めローラ77等と、ピットマンアーム60に連結された連繋部材61、62、64、71と、連繋部材61、62、64、71に連結された旋回切替操作具73とを備え、旋回切替操作具73は、操舵部材が所定量以上回動すると、カム74、ローラ77などを機械的に駆動することによって植え付け装置52を上昇させるモードと、操舵部材が所定量以上回動しても、カム74、ローラ77などを駆動しないモードが選択出来る。
(もっと読む)
作業機
【課題】後進時に作業部の上昇操作によって機体を上昇させる作業機において、機体の動作状況をオペレータに直感的に把握させることができる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの後進操作が検出されている場合において、刈取部が最上端位置にある状態で、刈取部昇降スイッチの上昇側操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。そして、制御部は、この機体上昇制御とともに、ブザーによって機体の上昇を報知する。この状態で、主変速レバーが前進操作に切り替えられたことが検出されると、制御部は、機体の高さを所定位置まで下降させる機体下降制御を行うとともに、ブザーによって機体の下降を報知する。
(もっと読む)
農作業機の対地作業機自動ローリング制御装置
【課題】凹凸が多くて左右に傾き易い圃場でも安定して作業機の水平維持が行われるようにする。
【解決手段】傾斜センサ14の検出に基づく絶対傾斜角θsを基準に対地作業機18のローリング制御を行うか、角速度センサ16の検出に基づく相対傾斜角θk又は前記絶対傾斜角θsに角速度センサ16の相対傾斜角θkを加味した作業機傾斜目標角θtを基準に対地作業機18のローリング制御を行うかを判定する手段を設け、前記判定手段の判定結果にもとづき、走行機体の傾き検出時に角速度センサ16の傾斜検出値に基づいてローリングシリンダ9に作動パルス信号を出力してローリング制御を行い、傾斜センサ14の傾斜検出値でローリングシリンダ9に作動パルス信号を続けて出力してローリング制御を行うよう構成し、角速度センサ16の制御時の出力パルスのオン時間を傾斜センサ14の制御時のオン時間よりも長くする。
(もっと読む)
作業車のリフトアーム昇降構造
【課題】作業車のリフトアーム昇降構造において、エンジンの始動操作を行った後に、作業者の誤解を招かないように構成する。
【解決手段】昇降操作具23の操作に伴って昇降操作具23の操作位置に対応する位置とリフトアーム7の位置との差により、制御弁11が上昇及び下降位置に操作され、昇降操作具23の操作位置に対応する位置とリフトアーム7の位置とが合致すると、制御弁11が中立位置に操作される。昇降操作具23の操作位置に対応する位置を検出する第1位置センサー38と、リフトアーム7の位置を検出する第2位置センサー44とを備える。キースイッチ43のOFF位置からON位置への操作時において、第1及び第2位置センサー38,44の検出値が合致しないと、昇降操作具23の操作位置に対応する位置を変更して、第1及び第2位置センサー38,44の検出値を合致させる。
(もっと読む)
移植機
【課題】専用の表示部を設けることなく、センサチェックモードにおいて実際のセンサデータを目視可能とし、高度なメンテナンスを可能にする。
【解決手段】稼働時間を積算し、該積算した稼働時間を表示器16に表示させる制御部15を備えた乗用田植機において、制御部15は、センサから入力されるセンサデータが正常であるか否かをチェックするセンサチェックモードである場合、表示器16にセンサデータを表示させる。また、制御部15は、異常が発生した場合、表示器16に異常種別に対応したエラーコードを表示させるが、センサチェックモードである場合は、エラーコードよりも優先してセンサデータを表示させる。
(もっと読む)
農作業機
【課題】本発明では、農作業機の走行機体に対地作業機をローリング制御可能に装着した構成で、エンジンの回転速度の変化にかかわらず、ローリング制御が精度良く作動するようにすることを課題とする。
【解決手段】農作業機の走行機体1に対地作業機13を水平シリンダ19の駆動でローリング可能に装着し、走行機体1或は対地作業機13に設けた傾斜センサ23の検出信号とエンジン2の回転を検出するエンジン回転センサ27の検出回転数をコントローラ30に入力し、該コントローラ30から出力する水平シリンダ19の駆動出力デュティー比をエンジン回転数の低下で増加させて水平シリンダ19の動作速度がエンジン2の実用回転域で略一定になるようにした構成したことを特徴とする農作業機の構成とする。
(もっと読む)
農作業機
【課題】トラクタに装着し農作業をする農作業機が作業しているか否かをより的確に判定
する判定システムを有する農作業機を提供することを目的とする。
【解決手段】農作業機が移動しているか否かを検知する移動検知手段1と、農作業機の姿勢が作業姿勢であるか否かを検知する作業姿勢検知手段2と、農作業機が作業している否かを判定する判定手段4とを有し、判定手段4は、移動検知手段1からの情報から農作業機が移動中であり、かつ、作業姿勢検知手段2からの情報から農作業機の作業姿勢が作業状態であると判断した場合、当該農作業機が作業中であると判定する。
(もっと読む)
1 - 10 / 10
[ Back to top ]