
Fターム[2B304QC03]の内容
Fターム[2B304QC03]の下位に属するFターム
スイッチセンサ (10)
Fターム[2B304QC03]に分類される特許
1 - 20 / 93
作業車両
【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
苗移植機

【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
田植機
【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、植付部と、土壌反力検出装置と、制御部と、を備える。植付部は、植付爪を駆動することにより苗の植付けを行う。土壌反力検出装置は、植付爪が苗の植え付けを行うごとに土壌から受ける土壌反力を検出する土壌反力検出部と、植付爪の回転位相を検出する回転位相検出部を備えている。前記制御部は、前記土壌反力及び回転位相に基づいて植深値を算出する(S102)。そして制御部は、検出された植深値に基づいて、植付部を昇降制御する(S109)。
(もっと読む)
作業車両
【課題】作業機の昇降制御を安定させた作業車両を提供する。
【解決手段】田植機は、植付部と、制御部と、を備える。制御部は、植付部の加速度(具体的にはフロート角加速度)を取得する。そして制御部は、前記加速度に二階微分ゲインKd2を乗じたものに基づいて、植付部の昇降制御を行う。このように植付部の加速度に基づいて昇降制御を行うことにより、植付部の上下速度の変動が大きい場合の振動的な応答を抑制できる。また、前記加速度は、圃場表面からの反力によって生じるため、当該加速度に基づいて制御を行うことにより、圃場の硬さに応じた制御動作を実現することができる。
(もっと読む)
トラクタ
【課題】車輪がスリップした場合に適正にプラウを上昇させて耕起作業を継続するトラクタを構成する。
【解決手段】牽引負荷センサSで検出した牽引負荷値で制御情報を参照して得られる目標対機体レベル値までプラウを上昇させるドラフト制御手段34が備えられている。制御情報はプラウの目標耕深に設定した際の目標耕深と牽引負荷値とに基づいて設定されるものであり、スリップ率取得手段37で検出するスリップ率が閾値を超えた場合には、既に設定されている制御情報に代えて、同じ値の牽引負荷値に対する目標対機体レベル値が高い値となる制御情報を新たに設定することでプラウを上昇させる。
(もっと読む)
薬液散布作業車両
【課題】旋回時又は旋回終了時に旋回外側のサイドブームを自動的に上昇又は下降させる制御を安全性を考慮して可能にした薬剤散布作業車両を提供すること。
【解決手段】GPS受信機81から得られる車速又は車輪12又は13の回転数から得られる車速により適切な薬液散布量となるように薬液タンク18からの薬液流量を流量制御モータ10により流量調節弁73の開度を調整する。このとき車輪12及び/又は13の操舵角の検知により自動的に旋回外側のサイドブーム44の上昇を行い、また前記車速が所定値以上になると旋回外側のサイドブーム44の自動上昇を行わない制御を行うことで、高速走行時にサイドブーム44の破損等の不具合を防止できる。
(もっと読む)
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
農作業機
【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
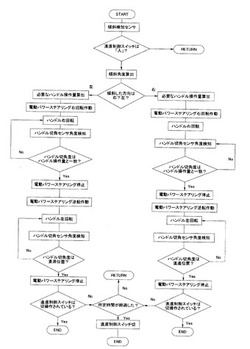
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
トラクタ
【課題】ロータリ耕耘装置の強制昇降時にはエンジンストールを招くことなくエンジンの回転速度を変更し得るトラクタを構成する。
【解決手段】ロータリ耕耘装置の強制上昇制御時には、遅延時間設定ダイヤル41で設定されている第1遅延時間が経過した後に回転速度変更手段52がエンジンEの回転速度を減ずる減速制御を行い、この上昇状態において強制下降制御を行う際には、回転速度変更手段52がエンジンの回転速度を復帰させる復帰制御を行い、強制下降制御を開始するタイミングで復帰制御を開始し、この後、遅延時間設定ダイヤル41で第1遅延時間とともに設定される第2遅延時間が経過した後にロータリ耕耘装置の強制下降制御を開始する。
(もっと読む)
対地作業部付設の作業車両
【課題】圃場における作業領域と作業能率を損なうことなく、機体旋回の終了間際のリスクを抑えて安定した作業走行の再開を可能とする対地作業部付設の作業車両を提供する。
【解決手段】作業車両は、作業位置に下降可能な作業部と、駆動輪の伝動を左右個別に切替え可能なサイドクラッチと、これら作業部およびサイドクラッチのそれぞれについて、直進時は作業位置および両側伝動、旋回時は非作業位置および旋回内側を非伝動に制御する制御部とを備えて構成され、この制御部は、操舵装置による旋回動作の開始により旋回走行距離を計測しつつ、次の直進動作の開始の時に、サイドクラッチを両側伝動に切替えるとともに、この時点以降で所定の旋回走行距離に至る間に、作業部を作業位置に切替えるものである。
(もっと読む)
オフセット作業機の作業方法
【課題】走行機体にオフセット作業が行えるように装着された作業機が、走行機体の移動と作業機自身の水平面内での回動及び移動により、圃場の作業部分から隅部分までの仕上げ作業が連続して行えるようにする。
【解決手段】走行機体2の前進走行に伴って前進する作業機1を一方の側にオフセットさせたときに、前記作業機1がその作業機1に介装された2種類の電動シリンダまたは油圧シリンダの伸縮により水平面内での前記走行機体2に対する2以上の水平回動の自由度を有するオフセット作業機を用い、前記走行機体2が前進走行しながら旋回したときに、前記作業機1に取り付けられた位置方位センサ20からの検出情報に基づいて前記2種類の電動シリンダまたは油圧シリンダの伸縮作動を自動制御することにより前記作業機1を水平面内で2以上に水平回動させながら、前記走行機体2に対する姿勢を連続的に順次変化させて前記作業機1自体の直進性を維持する制御を行う。
(もっと読む)
作業車輌
【課題】ロータリ作業機のリヤカバーが畦畔等に意に反して当接する等の問題を解消し得る作業車輌を提供する。
【解決手段】制御部は、リヤカバー12の回動量検出値が、該リヤカバー12が接地しない状態より更にロータリ作業機3側に移動した値となった場合、誤操作信号を出力するように構成される。このため、トラクタが後進してリヤカバー12が畦畔17等に当たると、リヤカバー12の回動量検出値が非接地での値より更にロータリ作業機3側に移動した値となる。これにより、制御部が、誤操作が行われたものと判断して誤操作信号を発し、ブザーを作動させて警告音を鳴らしたり、エンジンを停止したりすることで、更なる後進によるリヤカバー12の破損を防止する。
(もっと読む)
農作業車の姿勢制御装置
【課題】本発明では、圃場の小さな凹凸による揺れ程度では走行機体又は作業機の傾き修正をゆっくりと行い、大きな凹凸による傾きに対しては走行機体又は作業機の傾き修正を迅速に行うことで姿勢変動の少ない安定した農作業車の姿勢制御装置を提供することを課題とする。
【解決手段】走行機体又は作業機の絶対傾斜角を検出する傾斜センサと傾斜角の速さから傾斜角を検出する角速度センサを設け、該角速度センサが検出する傾斜角が所定値以下の場合には傾斜センサが検出する絶対傾斜角を傾斜目標角とし、角速度センサが検出する傾斜角が所定値を超えると、このときの走行機体又は作業機の絶対傾斜角に角速度センサが検出した傾斜角を加算して新たな傾斜目標角として走行機体又は作業機の姿勢を修正制御すべく構成したことを特徴とする農作業車の姿勢制御装置の構成とする。
(もっと読む)
畦成形機
【課題】水田等の圃場の作業残隅部の畦成形作業を走行機を後進させて行うような熟練を要する作業機ではなく、制御装置や制御プログラムが簡易で操作が簡単であるとともに、全体の製造コストを低くできる畦成形機の提供。
【解決手段】走行機が畦から離れる方向に旋回走行しながら直線状の連続した畦を成形する非平行走行畦成形作業が行える制御部を有し、非平行走行畦成形作業時は、畦成形作業部4に畦成形作業部4の進行方向の変位量を検知する検知手段6が設けられていて、変位量に基づき第2水平回動手段を作動させて畦成形作業部4の進行方向を一定方向とする制御を行うとともに、第1水平回動手段はフリー状態と固定状態を交互に予め設定した実行時間で繰り返し行う制御のみにより制御されて畦成形作業を行う畦成形機による。
(もっと読む)
直播機
【課題】硬軟センサの設置位置を工夫することにより、苗植付深さ又は播種深さの制御度合いを高めた直播機を提供すること。
【解決手段】走行車体2の後部に複数条分の種子を圃場に移送する移送管93,95を備えた直播装置82と移送管93,95の種子排出口を圃場上に向けて保持するフロート55,56を走行車体に対して油圧シリンダ46とリンク装置3により昇降自在に設け、フロート55,56の前方に接地して地面を整地するロータ27a,27bを直播装置82に対して昇降自在に設け、フロート55,56とロータ27a,27bの間に圃場の硬軟センサ114を設け、該センサ114の検出値に応じて油圧シリンダ46を伸縮して直播装置82の播種深さを調節する制御装置101を設けている。
(もっと読む)
走行車両
【課題】 本発明は、機体が小回り旋回性を維持しながら、旋回後半には旋回後のための位置合わせが容易に行えるようにすることを課題とする。
【解決手段】 ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して旋回内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して旋回内側のサイドクラッチを常時入状態にする旋回連動機構と、走行車体の旋回中において、前輪の向きが操舵状態から直進状態側へ戻されるのを旋回角度センサが検出するのに連動して、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更し、以降、前輪が直進状態へ戻るまで前記入状態の割合を小さく変更しない制御装置を備えた走行車両とした。
(もっと読む)
トラクタ
【課題】ダッシング現象およびその大きさをPTO軸の回転ひずみによって測定することによりダッシング量の大きさをいち早く判定しようとする。
【解決手段】機体後部にロータリ耕耘装置25を昇降自在に連結し、該ロータリ耕耘装置25には機体側PTO軸62の駆動力を受けて正転連動する耕耘軸33に複数の耕耘爪29を設けたトラクタにおいて、前記PTO軸62の回転トルクを測定するトルク測定手段71を設け、ロータリ耕耘装置25が非作業状態から作業状態へ降下する際の回転トルクの変動に基づいて機体のブレーキ機構60,60に制動出力する制御部42を設ける。
(もっと読む)
作業車の制御装置
【課題】前輪増速手段又は自動上昇手段を適切なタイミングで作動させることができ、位置合わせ走行の作業性を向上できる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、前輪2を後輪3の周速度よりも速く増速駆動させる前輪増速手段51を備え、前輪2の切れ角が所定増速角度β1以上であると前輪増速手段51が作動するように構成し、車体1の作業走行経路に対する位置合わせ走行を推測する推測手段54を備え、推測手段54により位置合わせ走行が推測されると、前輪増速手段51が作動しないように構成してある。
(もっと読む)
作業車の制御装置
【課題】旋回作業に伴うものでない可能性の高い操縦ハンドルの操作で作業装置が自動的に上昇することを防止し、作業装置の上昇を適切なタイミングで行うことができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、切れ角が所定上昇角度α1以上になると、作業装置Rを上昇させる自動上昇手段53を備え、操縦ハンドル6が右側又は左側の一方側に操作された直後に、操縦ハンドル6が右側又は左側の他方側に操作され、他方側への操縦ハンドル6の操作により切れ角が所定上昇角度α1以上になった場合に、自動上昇手段53が作動しないように制御する制御手段を備えてある。
(もっと読む)
1 - 20 / 93
[ Back to top ]