
Fターム[2B304QC02]の内容
Fターム[2B304QC02]に分類される特許
1 - 20 / 21
苗移植機
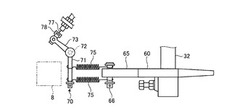
【課題】メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供すること。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
(もっと読む)
作業車両

【課題】本発明は、路上走行と耕耘作業のモード切替手段を設けることによって路上走行速のままで耕耘作業に入るような事態を回避し、問題解決を図らんとするものである。
【解決手段】メータパネル(8)の適所にスイッチON・OFFにより耕耘作業モードと路上走行モードとに切り替えできるモード切替スイッチ(22)を設け、前記耕耘作業モードの詳細設定をする各種設定器(29)は、前記メータパネル(8)部周辺若しくは運転操作部(9)近くに設置してあることを特徴とする作業車両とする。また、前記各種設定器(29)は、耕深設定器(24)、傾斜設定器(26)、ブレーキ調整設定器(28)等からなり、タッチパネル画面で調整が行えるように構成してあることを特徴とする作業車両とする。
(もっと読む)
田植機
【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、土壌反力検出装置27と、植付爪22を備えた植付部と、土壌反力検出装置27の出力に基づいて苗の植深を算出する制御部と、を備えている。土壌反力検出装置27は、植付爪22に生じる土壌反力を検出する。また土壌反力検出装置27は、植付爪22の近傍に配置されるプローブ29と、ロードセル28とを備える。前記プローブ29は、植付爪22の長手方向と平行に配置された棒状部材であり、その一端側は植付爪22の先端と同じ方向を向くとともに、他端側はロードセル28の荷重検出面に当接している。
(もっと読む)
草刈作業機
【課題】トラクタの運転席から容易に草刈作業部を操作可能とした草刈作業機を提供する。
【解決手段】草刈作業機において、オフセット機構部と回動機構部の作動は、トラクタ運転席近傍に設けたジョイスティックレバー861の操作によって行われる。また、草刈作業部5が装着部2に対し水平状態を含む一定の角度範囲のときのみトラクタ後方位置へ移動可能に牽制手段が設けられている。さらに、自動収納スイッチ862を備え、自動収納スイッチ862を操作すると自動的に草刈作業部5が水平位置に回動するとともに、トラクタ後方の収納位置へ水平移動する制御部を備えた草刈作業機による。
(もっと読む)
代かき作業機の耕深表示装置
【課題】代かき作業時に耕深を一定にすることができる耕深表示装置を提供する。
【解決手段】耕深表示装置40は、機体5に回転自在に支持された耕耘ロータ13の上部を覆うシールドカバー13と、この後部に上下方向に回動自在に配設されて耕耘ロータ13により耕耘された耕土を整地する第1整地板11と、この後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備える代かき作業機1に設けられる。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され、耕耘ロータ13により耕耘された耕土の耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動自在な揺動アーム42と、揺動アーム42の回動に応じて耕深を表示する耕深表示部50とを有してなる。
(もっと読む)
薬液散布作業車両
【課題】旋回時又は旋回終了時に旋回外側のサイドブームを自動的に上昇又は下降させる制御を安全性を考慮して可能にした薬剤散布作業車両を提供すること。
【解決手段】GPS受信機81から得られる車速又は車輪12又は13の回転数から得られる車速により適切な薬液散布量となるように薬液タンク18からの薬液流量を流量制御モータ10により流量調節弁73の開度を調整する。このとき車輪12及び/又は13の操舵角の検知により自動的に旋回外側のサイドブーム44の上昇を行い、また前記車速が所定値以上になると旋回外側のサイドブーム44の自動上昇を行わない制御を行うことで、高速走行時にサイドブーム44の破損等の不具合を防止できる。
(もっと読む)
トラクタの作業機上限規制装置
【課題】作業機をトラクタの後部にリンク機構を介して昇降自在に装着したものにおいて、作業機の上昇上限位置をトラクタ近接位置に容易に設定することができるトラクタの作業機上限規制装置を提供する。
【解決手段】作業機8をトラクタ1の後部に昇降自在に装着するリンク機構9を備え、このリンク機構9を駆動して作業機8を上昇させる昇降シリンダ22を備え、作業機8が上昇してトラクタ1に近接した位置であるトラクタ近接位置に達したことを検出する上限検出センサ47を設け、この上限検出センサ47の検出信号によって昇降シリンダ22の作業機上昇動作を停止させるように構成する。
(もっと読む)
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
作業車両
【課題】走行機体の左右傾斜に拘わらず作業機を圃場面に対して予め定められた左右傾斜姿勢で保持させる左右傾斜制御を行う作業車両であって、低コストで、精度の高い左右傾斜制御を実行することが可能な作業車両を提供する。
【解決手段】前輪1側のフロントアクスルケース23の左右傾斜によって走行機体3が左右傾斜することを抑制するために、走行機体3をフロントアクスルケース23に左右傾斜可能に支持し、フロントアクスルケース23の左右傾斜角を検出する前輪側傾斜角検出手段と、走行機体3の走行速度を検出する車速検出手段とを設け、制御部は、前輪側傾斜角検出手段によって事前に検出されたフロントアクスルケース23の左右傾斜角と、車速検出手段からの検出結果とによって、走行機体3のその後の左右傾斜角を予測し、予測結果及び傾斜角検出手段36の検出結果に基づいて左右傾斜制御を実行する。
(もっと読む)
作業車両
【課題】機体後部に支持した作業機のローリング角度調節について、最小限の操作スイッチ構成と簡易な調節操作を確保した上で、傾斜センサによる一定傾斜の作業機による安定的な作業走行を可能とする作業車両を提供する。
【解決手段】作業車両は、ヒッチ(10)を介して支持した作業機(18)のローリング角度について、機体に備えた傾斜センサ(14)によって水平状態に維持する自動水平制御の適用の当否を水平切換スイッチ(43)の操作により切替え、自動水平制御の非適用時は、自動復帰構成の手動傾斜スイッチ(42a,42b)の左右の傾斜操作に応じてローリング角度を調節する制御部(35)を備えて構成され、上記制御部(35)は、自動水平制御の適用時に限り、所定時間を超える手動傾斜スイッチ(42a,42b)の継続操作に応じてローリング角度を調節するものである。
(もっと読む)
作業車両
【課題】
土壌状態に合わせてエンジンの燃料噴射量を変更し、安定した土壌ではエンジンの回転数を減少させて燃費を向上させると共に、不安定な圃場ではエンジンの回転数を増大させて走行姿勢を安定させることのできる作業車両を提供する。
【解決手段】
左右の前輪6,6と左右の後輪7,7により圃場を走行する走行車体9にエンジン8を設け、走行車体9の後部に圃場に苗を植え付ける植付部5を設けた作業車両において、走行する土壌の状態を検出する土壌センサ10を設け、土壌センサ10が検出した土壌状態に合わせてエンジン8の燃料の噴射量を増減制御する構成とし、土壌センサ10の下部に、土壌センサ10の検出面11に間欠的に接触して付着物を除去する清掃部材12を設ける。
(もっと読む)
苗移植機
【課題】フロートの前側に夾雑物が溜まることがあっても、苗の植え付け深さを適正に行うことができる苗移植機を提供すること。
【解決手段】センターロータ27bのカバー37の後端部を開閉可能にし、カバー37の後端部に回動自在に取り付けられた回動角度センサ39aにより作業中に接触体39が開閉したことを検知すると接触体39に夾雑物が引っかかったと判断し、油圧バルブ48が昇降油圧シリンダ46を伸張させて苗植付部4を上昇させる。これによりフロート55,56と圃場面との間に空間部が生じて夾雑物がフロート55,56に引っかかることを防止できるて苗の植付深さが正確に検知されて植付精度が向上し、フロート55,56に引っかかった夾雑物を取り除く作業が必要無くなり作業能率が向上する。また、昇降用油圧シリンダ46の伸縮制御感度を敏感側にして苗植付部4を瞬間的に浮かせることで整地ロータ27aが夾雑物を乗り越えることができるようにする。
(もっと読む)
乗用型苗植機
【課題】 適切な位置で苗の植え付けができる制御装置を備えた乗用型苗植機を提供すること。
【解決手段】 エンジンからの動力が伝達される伝動装置と、該伝動装置からの出力で駆動する左右の後輪と、該後輪への伝動を入り切りするサイドクラッチと、昇降自在の苗植付部と、走行距離を検出する走行距離検出センサと、操向操作用のハンドルを走行車体に設け、ハンドルの操作角度が所定値以上になると走行距離検出センサにより走行距離の検出を開始し、該走行距離が設定距離に達すると報知する報知装置を設けたことを特徴とする乗用型苗植機とした。
(もっと読む)
田植機
【課題】 走行機体の後部に苗植付け装置を昇降可能に連結するとともに、苗植付け装置における植付け部位の前方に整地装置を配備してある田植機において、深植え傾向になることを回避するとともに、苗植付け装置を前後に短いものにして機体方向転換などを容易に行えるようにする。
【解決手段】 苗植付け装置5を、整地フロートを備えないものに構成するとともに、整地装置16の前方に苗植付け装置5の田面に対する高さを検知する高さ検出機構26を配備し、高さ検出機構26の検出情報に基づいて苗植付け装置5を昇降制御する制御手段を備えてある。
(もっと読む)
耕深制御装置
【課題】除草目的等のため圃場表面を極く浅い耕深制御を行なわせる。
【解決手段】機体後部に昇降自在に耕耘爪(1)を有する耕耘装置(2)を装着し、耕耘装置(2)の耕深検出手段の検出結果をトラクタ側の耕深制御部(C)に伝送して耕耘装置(2)を自動的に昇降制御するトラクタにおいて、耕耘装置(2)の耕耘カバー(24)に対するリヤカバー(3)の上下動を検出する第1耕深検出手段(50)と、リヤカバー(3)の下端に上下動自在に連結された均平板(4)の上下動を検出する第2耕耘検出手段(51)とを備え、前記耕深制御部(C)に第1耕耘検出手段(50)又は第2耕耘検出手段(51)のうち一方の検出結果を受け入れる選択手段を備える。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 刈取部が水平基準面に対して傾斜しながら刈取走行する場合であっても、刈取部が地面に接触することを回避することが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 刈取部の対地高さが目標対地高さになるように昇降操作手段C1を制御する刈取昇降制御、並びに、刈取部の水平基準面に対する傾斜角が目標傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段Hが、刈取昇降制御として、目標傾斜角設定手段50にて設定された目標傾斜角が、刈取部が水平姿勢又はそれに近い姿勢に対応する設定範囲を外れている場合には、刈取部が目標傾斜角になったと仮定したときに、下位側に位置する対地高さ検出手段Aについての目標対地高さとして、目標対地高さ設定手段54にて設定された目標対地高さを設定量高い側に補正した補正目標対地高さを定める目標高さ補正処理を実行する。
(もっと読む)
コンバイン
【課題】穀稈を刈取る刈取部の高さを制御する手段を備えたコンバインの提供。
【解決手段】超音波センサの検出値に基づいて圃場面からの刈取部の高さhを検出し(S13)、刈高さの目標値からの偏差Δを算出する(S14)。また、昇降ポジションセンサの検出値に基づいて基準面からの刈取部の高さpを検出し(S16)、2種類の高さの差(h−p)を算出する(S17)。そして、所定距離を走行したときの圃場面の高さの変化量と、刈取部の相対高さの時間変化とに基づいて総合的な高さの変化量dHを算出し(S20)、偏差Δと総合的な高さの変化量dHとを用いて刈取部の上昇下降力を決定する(S21)。決定した上昇下降力に基づいて刈取部の昇降移動を制御する(S22)。
(もっと読む)
移植機
【課題】走行機体を下降させた植付作業の途中でも、水平制御機構のロックを簡単に解除することができて、植付作業の途中で水平制御機構のロックを解除した場合でも、植付作業が途中で中断して圃場に植付けのない部分が生じるのを防止できるようにする。
【解決手段】ロック解除レバーは、ロックレバーをロック位置に係止する係止位置と、ロックレバーのロック位置への係止が外れる退避位置とに移動自在とされ、ロック解除レバーを退避位置に操作したときにロックレバーがロック解除位置に移動するように、ロックレバーをロック位置側からロック解除位置側に向けて付勢するロックレバー付勢手段が設けられ、ロック解除レバーを退避位置側から係止位置側に向けて付勢する解除レバー付勢手段が設けられ、昇降レバーが上昇側に操作されたときに、昇降レバーに連動してロック解除レバーを解除レバー付勢手段の付勢に抗して退避位置に移動させるべくロック解除レバーを昇降レバーに連動させた。
(もっと読む)
移植機
【課題】植付作業の際に、畝に被覆したマルチフィルムの両側に置き土が断続して設けられているような場合でも、走行機体の横揺れが大きくなって植え付けが蛇行するのを防止できると共に、旋回時には走行機体の水平復帰をスムーズになし得るようにする。
【解決手段】ローリングシリンダを油圧により動作させて走行機体の左右が水平になるように左右の車輪を相対的に昇降移動させる水平制御機構が設けられた移植機において、
前記ローリングシリンダに流れる作動油の流量を絞る絞り位置と該絞りを開放する開放位置とに切替可能な絞り切替弁が設けられ、絞り切替弁は、昇降レバーが下降側に操作されたときに絞り位置に切り替わり、昇降レバーが上昇側に操作されたときに開放位置に切り替わるように、昇降レバーに連動されている。
(もっと読む)
水田作業機の自動昇降制御装置
【課題】 走行機体の後部に昇降自在に連結した水田作業装置にセンサフロートを上下揺動自在に装備し、センサフロートの揺動角度を目標角度に維持するように水田作業装置を昇降制御するよう構成した水田作業機の自動昇降制御装置において、走行機体の前後傾斜を応答性良く的確に検知して、的確な目標角度補正を行い、安定した作業深さをもたらす昇降制御を実行できるようにする。
【解決手段】 走行機体に機体前後方向の角度変化を検知する角速度センサ31を設け、この角速度センサ31の検出情報に基づいてセンサフロートの目標角度θ0を自動補正する制御手段を備えてある。
(もっと読む)
1 - 20 / 21
[ Back to top ]