
Fターム[2B396PE07]の内容
脱穀機要素−籾処理 (10,947) | 操作装置、制御装置又はセンサからの伝達機構 (143) | 信号又は操作伝達手段 (122) | 電気信号式伝達 (89) | パルス信号[デジタル信号] (10)
Fターム[2B396PE07]に分類される特許
1 - 10 / 10
コンバイン
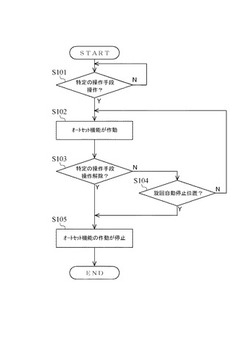
【課題】排出オーガが自動的に昇降又は旋回することを防止すると共に、オートセット機能の作動時において遠隔操作装置(リモートコントローラ)の無線通信に使用される電波が本機に届かなく場合であっても、排出オーガの自動的な昇降又は旋回を緊急に停止させることができるコンバインを提供する。
【解決手段】前記制御手段60は、前記複数の操作手段(ボタン80a・80d等)のうち特定の操作手段(オートセットボタン84)への操作に応じて送信された遠隔指示を継続して受信している場合には、前記排出オーガ32を自動的に所定の高さまで上昇させた後、所定の方向へ旋回させる一方、その継続していた当該遠隔指示の受信が途絶えた場合には、当該排出オーガ32の自動的な上昇又は旋回を停止させる制御を実行するものである。
(もっと読む)
コンバインの穀粒排出構造

【課題】穀粒排出口で穀粒が滞留している状態でシャッタが閉状態に切り換わることに起因した不具合の発生を防止する。
【解決手段】穀粒排出口のシャッタの開閉を制御する制御手段と穀粒排出口での穀粒の滞留を検出する穀粒センサとを備え、制御手段が、穀粒排出装置の排出停止状態への切り換えを検知すると、穀粒センサが穀粒の滞留を検出しているか否かを判別し、穀粒センサが穀粒の滞留を検出している場合はシャッタを開状態に維持し、滞留を検出していない場合はシャッタを閉状態に切り換え、シャッタを開状態に維持している状態では、制御手段が、穀粒排出口の移動を検知したときに再び穀粒センサが穀粒の滞留を検出しているか否かを判別し、穀粒センサが穀粒の滞留を検出している場合はシャッタを開状態に維持し、滞留を検出していない場合はシャッタを閉状態に切り換えるように構成する。
(もっと読む)
コンバイン
【課題】圧力検出手段の検出結果及び穀粒量の関係を示す関数に、圧力検出手段の取付位置及び取付姿勢、並びに刈取る品種に応じた適切な係数を使用し、貯留部に貯留する穀粒量を正確に検出することができるコンバインを提供する。
【解決手段】投口センサ23aの検出結果及び演算して求めた穀粒量に基づいて未知係数を求めて、実関数を導出し、投口センサ23aの穀粒タンク4への取付位置並びに取付姿勢の差異、及び刈取る品種などの諸条件に応じた適切な実関数を穀粒量の検出に使用する構成とした。
(もっと読む)
コンバイン
【課題】中折れ式の排出オーガを伸長位置又は屈折位置の何れかに電動で切り換え得るコンバインにおいて、排出オーガの伸長/屈折動作時において周囲との干渉を防止することができるコンバインを提供する。
【解決手段】横オーガ7bは、先端部側の第2横オーガ7b2が基端部側の第1横オーガ7b1の側方に配置された回動軸330回りに回動することで、前記第2横オーガ7b2が前記第1横オーガ7b1に対して並列配置となる屈折位置Q1及び前記第2横オーガ7b2が前記第1横オーガ7b1と同軸配置となる伸長位置Q2の間を移動する。屈伸駆動機構X3は、前記第2横オーガ7b2を前記屈折位置Q1及び前記伸長位置Q2の間で移動させる。前記横オーガ7bが収納位置P2に位置した状態でのみ前記第2横オーガ7b2を前記屈折位置Q1及び前記伸長位置Q2の間で移動させるように前記屈伸駆動機構X3を制御する。
(もっと読む)
コンバイン
【課題】第1オーガ操作具によるオーガ操作と第2オーガ操作具によるオーガ操作とが競合しないように構成されたコンバインにおいて、制御部と第1オーガ操作具及び第2オーガ操作具との電気的接続や、制御部の処理手順を簡略化する。
【解決手段】第1オーガ操作具又は第2オーガ操作具からの操作信号に応じてオーガの駆動制御を行う制御部24とを備え、制御部24を第1オーガ操作具と第2オーガ操作具とから異なる種類の操作信号が同時に入力されると、一方の操作信号を優先するように構成したコンバインにおいて、制御部24が第1オーガ操作具と第2オーガ操作具とから異なる種類の操作信号が入力されると、先に入力された操作信号に基づいてオーガの駆動制御を行う。
(もっと読む)
農作業機の制御装置
【課題】LAN又はCAN通信環境を複数のコントローラに適用した農作業機の制御装置において、従来よりも更に好適な制御構造を構築する。
【解決手段】本願発明の制御手段150は、各入力系機器からの入力制御に特化した入力専用コントローラ151aと、各出力系機器への出力制御に特化した出力専用コントローラ151bと、プログラム処理に特化した制御専用コントローラ151cと、各コントローラ間を接続するCAN通信バス152とを有する。各入力系機器からの入力情報は、入力専用コントローラ151aを介して制御専用コントローラ151cに伝送され、前記入力情報に基づき制御専用コントローラ151cにて得られた出力情報が、制御専用コントローラ151cから出力専用コントローラ151bを介して各出力系機器に伝送される。
(もっと読む)
コンバイン
【課題】穀粒排出オーガの操作装置において、使用頻度の高いスイッチを操作し易い場所に配置することによって操作性を高め、コンバインの作業能率を向上させる。
【解決手段】旋回、昇降、伸縮用の3つのアクチュエータ(5,6,7)を装備した穀粒排出オーガー(4)を、コントローラ(17)を介して制御する操作装置(8)において、上側に自動張出制御の張出しスイッチ(9)と自動収納制御の収納スイッチ(10)とを配置し、その下側に、前記2つのアクチュエータ(5,6)をそれぞれ単独に手動操作する4つの手動スイッチ(11,12,13,14)を配置し、更に、該4個の手動スイッチの下側に2つの伸縮スイッチ(15,16)を配置する。
(もっと読む)
作業車両の警報装置
【課題】周囲の者やオペレータに、不快感を与えることなく異常を知らせることができる作業車両の警報装置を提供することを課題としている。
【解決手段】作業中の作動部の異常を検出する検出手段17,18,19,21,22,23,24と、警告音を鳴動させる報知手段12と、検出手段17,18,19,21,22,23,24によって異常が検出されると報知手段12により警告音を鳴動させる制御部14とを備えた作業車両の警報装置において、前記報知手段12よりも小音量の警告音を鳴動させる小音量報知手段13を設け、制御部14が、前記検出手段17,18,19,21,22,23,24による作動部の異常検出後の機器類の特定の作動条件又は作業条件に対応して前記報知手段12による警告音の鳴動を停止させて前記小音量報知手段13による警告音のみを鳴動させる。
(もっと読む)
コンバインの穀粒排出装置
【課題】穀粒排出オーガから穀粒タンクに穀粒を投入する際に、穀粒タンク上での穀粒排出オーガからの穀粒排出位置を自動的に調整して、穀粒タンク内に空隙が無くなるように穀粒を充満させて穀粒タンクの容積を有効に利用できるようにする。
【解決手段】グレンタンク(5)に備える穀粒排出オーガ(6)に、該穀粒排出オーガ(6)先端部の穀粒排出口(3)を含む所定の範囲を撮影可能なカメラ(1)を設ける。そして、該カメラ(1)による穀粒排出口(3)からの穀粒排出映像の分析によって穀粒タンク(8)内における排出穀粒の堆積状態を検出し、該検出結果に基づいて穀粒排出口(3)の左右揺動及び/或いは穀粒排出オーガ(6)の伸縮による穀粒排出口(3)の移動を自動的に行なわせて穀粒タンク(8)内における堆積穀粒の上面(B)を均平化すべく制御する。
(もっと読む)
穀粒排出装置
【課題】排出オーガを詰まらせることなく、かつ穀粒を損傷せずに排出する穀粒排出装置を提供する。
【解決手段】制御部50は穀粒排出スイッチ51と、エンジン回転センサ52からの信号が入力し、穀粒排出スイッチ51の立ち上がりエッジの際にはエンジン回転センサ52の検出したエンジン回転数が規定回転数以上で穀粒排出用切換え電磁バルブ43を開き、オーガ駆動装置を駆動する。排出オーガの駆動が一旦開始されると、エンジン回転数が低下しても、排出オーガの駆動は維持される。
(もっと読む)
1 - 10 / 10
[ Back to top ]