
Fターム[2C150ED63]の内容
Fターム[2C150ED63]の下位に属するFターム
ジャイロ (14)
Fターム[2C150ED63]に分類される特許
1 - 8 / 8
揺動装置
【課題】
簡単な構成により複雑な揺動を発生可能な揺動装置を提供する。
【構成】
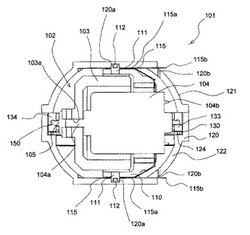
モータ104の回転軸104aに直結されたフライホイール103をベース110に搭載してなり、前記モータ104の回転により前記回転軸104aと同軸で回転する出力軸105が形成された回転体102を、ケース120に形成された案内軌道150を構成する摺接面に対して前記出力軸105を摺接可能に、前記ケース120の内部に支承する。
(もっと読む)
前方偏心ウェイトを有する乗物、特に振動モータを有する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。振動駆動部は、モータ210と、偏心ウェイト202と、を有し、偏心ウェイトは、前脚部104aの前方に配置されている。 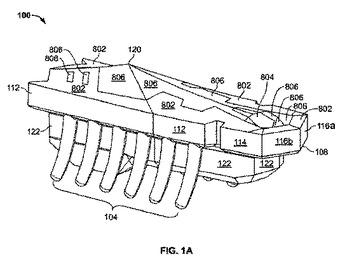 (もっと読む)
(もっと読む)
振動モータ及び2列の脚部を有する乗物、特に振動モータを有する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。乗物の本体部122と乗物の脚部との間には、空間、特にV字状の凹所があり、脚部は、正立回転中に内方に曲がる及び/または、脚部の列は、振動駆動部の回転軸の側部に位置する。 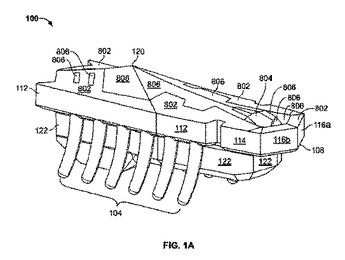 (もっと読む)
(もっと読む)
振動モータを有する乗物、特に自己正立する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。乗物は、振動モータの回転トルク205の効果によって回転して自身で正立するように構成されている。これは、例えば、本体部のまたは乗物の重心502を振動モータ202、210の回転軸に近接してまたは回転軸上に位置付けるように構成することによって達成される。 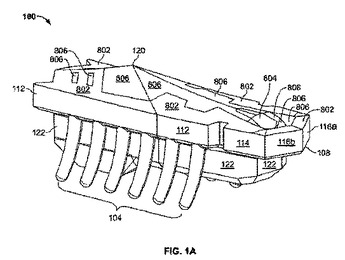 (もっと読む)
(もっと読む)
遠隔操作のオートバイ模型

【課題】高い安定性および操縦性を得る遠隔操作のオートバイ模型を提供する。
【解決手段】遠隔操作のオートバイ模型は、車体と、車体の前部および後部にそれぞれ配置された前輪15および後輪60と、動力出力装置40とを備える。後輪60は、固定シャフトと、ホイールリムセットと、ホイール本体と、ギヤホイールおよび複数の遊星ギヤを有する遊星ギヤセットと、ギヤホイールを単一方向で回転させる一方向回転部材と、遊星ギヤに接続したクランチセットと、クランチセットを囲むように配置されたフライホイールセットとを有する。
(もっと読む)
バイブレーションムービングコントロールトイ
【課題】 本発明はバイブレーションムービングコントロールトイに関し、特に偏芯おもりを有する一つのモーターの正逆回転によって振動を付勢させ、本体の進行と方向性を制御可能とした部品数の少ない移動玩具であり、特に車輪の無い移動方式として幼児等に興味を喚起させることができるバイブレーションムービングコントロールトイを提供する。
【解決手段】 本体底部下面の単独又は複数個所に予め傾斜して植設された植毛に対して圧縮反復作用を付与する為に、偏芯おもりを有する一つのモーターの正逆回転によって振動を付勢させ、本体の進行と方向性を制御可能としたバイブレーションムービングコントロールトイを提供する。
(もっと読む)
ベーゴマ玩具
【課題】従来のベーゴマのように巻きつけた紐の巻き戻しで回転させるとともに、ベーゴマ玩具の落とし所の腕前を問われ、単にシュータを使ってコマ玩具を回転させるコマ玩具では味わうことのできないテクニックが必要とされ、奥の深いベーゴマ遊びを楽しむことができるベーゴマ玩具を提供すること。
【解決手段】ベーゴマ玩具1は略逆円錐台状に形成されるとともに底面から回転軸体6が下方に突出し、該回転軸体6の周面には張り出し部13が周設され、上記ベーゴマ玩具1の側面には、上記紐2の巻き始めを係合させるための切欠き32が少なくとも1つ形成し、上記ベーゴマ玩具1の周面には、上記切欠き32から上記回転軸6の張り出し部13にかけて、上記紐2をガイドするガイド溝22を形成した。
(もっと読む)
錘の重力を利用した回転装置を使用した遊具やオモチャ
【課題】手でハンドルを上下すると、錘が扇形運動をしながら回転運動を始める。この回転運動を下の遊具やおもちゃのメリーゴーランド等にどのように減速や増速して伝える方法、又、回転エネルギーで他の動くおもちゃやからくりを動かす方法の提供。
【解決手段】ハンドル10の上下運動から支柱の高さの違いから、中心軸より横にある錘12が、安全ケースの中で回転運動をして、プーリー16、Oリング17、プーリー16で減速や増速して、Oリング17をねじりながら、メリーゴーラウンド等の遊具やおもちゃを回転させる。又、錘の回転運動を歯車で変速して、自由継手やスプリング継手で下部に継ぎ、フレキシブルワイヤー等で他の遊具やおもちゃのからくりを回転する装置。
(もっと読む)
1 - 8 / 8
[ Back to top ]