
Fターム[2D003BB09]の内容
Fターム[2D003BB09]に分類される特許
1 - 13 / 13
油圧ショベルの較正システム及び油圧ショベルの較正方法
【課題】本発明の課題は、作業点の位置検出の精度を向上させると共に、較正作業時間を短縮することができる油圧ショベルの較正システム及び較正方法を提供することにある。
【解決手段】油圧ショベルの較正システムは、形状検出部54と、座標検出部65aと、較正演算部65c,65dとを備える。形状検出部54は、車体に取り付けられている。形状検出部54は、作業具の形状を検出する。座標検出部65aは、形状検出部54が検出した作業具の形状から作業点の位置を認識して作業点の位置座標を検出する。較正演算部65c,65dは、作業点位置情報に基づいて、パラメータの較正値を演算する。作業点位置情報は、座標検出部65aによって検出された複数の位置での作業点の位置座標を示す。
(もっと読む)
油圧ショベルの較正システム及び較正方法

【課題】作業点の位置検出の精度を向上させると共に、較正作業時間を短縮することができる油圧ショベルの較正システム及び較正方法を提供する。
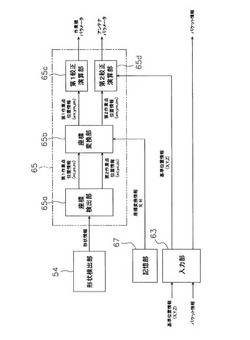
【解決手段】油圧ショベルの現在位置演算部は、ブームとアームと作業具との寸法と揺動角とを示す複数のパラメータに基づいて、作業具に含まれる作業点の現在位置を演算する。較正装置は、パラメータを較正するための装置である。較正装置の車体座標系演算部65aは、外部計測装置が計測した第1作業点位置情報と第2作業点位置情報とに基づいて、座標変換情報を演算する。座標変換部65bは、外部計測装置で計測された作業点の複数の位置での座標を、座標変換情報を用いて、外部計測装置における座標系から油圧ショベルにおける車体座標系に変換する。第1較正演算部65cは、車体座標系に変換された作業点の複数の位置での座標に基づいて、パラメータの較正値を演算する。
(もっと読む)
土工作業機械の進行方向を制御する方法及び装置
【目的】土工作業具を有する土工作業機械の進行方向を制御する方法及び装置を提供する。
【構成】方法及び装置は、機械の所望のヘッディングを求めること、機械の実際のヘッディングを求めること、所望のヘッディングの関数としての機械がたどる直線通路を求めること、実際のヘッディングの所望のヘッディングからの変位置を求めること、変位置の関数として作業具の所望のチルト角を求めること、及び作業具のチルト角を所望のチルト角に制御しこれに応答して機械を直線通路上に操舵することを含んでいる。
(もっと読む)
作業機械の作業範囲制御装置
【課題】作業機械の作業範囲制御装置に関し、フロント装置での作業時において安定性を向上させつつ作業性を向上させる。
【解決手段】下部走行体に対する上部旋回体の旋回姿勢を検出する旋回姿勢検出手段11L,11Rを設ける。また、フロント装置の作業範囲としての側方作業範囲を記憶する第一記憶手段32と、フロント装置の作業範囲として作業機械の機体中心から外端までの水平距離が該側方作業範囲よりも大きく設定された前方作業範囲を記憶する第二記憶手段33とを設ける。
さらに、フロント装置の作業範囲を制限する制御手段37を設け、該旋回姿勢が側方姿勢である場合に作業範囲を該側方作業範囲の内側に制限する。一方、該旋回姿勢が前方姿勢である場合に作業範囲を該前方作業範囲の内側まで拡大する。
(もっと読む)
建設機械
【課題】
簡便な構成で建設機械本体に対する位置、傾斜等を含む姿勢を正確に、而もリアルタイムで検出可能とした姿勢検出装置、及び該姿勢検出装置を具備した建設機械を提供する。
【解決手段】
建設機本体14と、該建設機本体に設けられた工事作業具8と、前記建設機本体の機械中心に対して既知の位置に設けられた2つのカメラ18,19と、前記工事作業具に設けられ、前記2つのカメラの視野にそれぞれ含まれる様に配置された少なくとも3のターゲット21と、前記2つのカメラで取得したステレオ画像から各画像中で共通する少なくとも3のターゲット像を抽出し、該各ターゲット像の3次元位置を求め、求めた3次元位置に基づき前記工事作業具の前記建設機本体に対する位置、姿勢を算出する演算処理装置とを具備する。
(もっと読む)
モータグレーダのブレード高さ制御装置
【課題】モータグレーダのブレード高さ制御装置において水糸のような基準線の設定の手間を削減することができ、また、モータグレーダに適した簡単な構成とする。
【解決手段】モータグレーダ10の車体に設定された測定点に取り付けられて、放射状にレーザビームを照射し、複数の反射地点から反射されたレーザビームを受信するレーザスキャナ32と、レーザスキャナ32から得られる測定点と複数の反射地点との計測距離から、ブレード22の高さを調整するための調整信号を出力する制御手段と、を備える。制御手段は、前記測定点と複数の反射地点との計測距離から各反射地点の高さを演算し、前記複数の反射地点の高さの中から、ブレード22の高さを検出すると共に、前記複数の反射地点の高さから基準値を求め、ブレード22の高さが基準値に追従するようにブレード22の高さを調整するための信号を出力する。
(もっと読む)
油圧ショベルのフロント制御装置
【課題】効率よく領域制限制御ができる油圧ショベルのフロント制御装置を提供する。
【解決手段】アーム1b、バケット1cの実際の角速度を基にしてバケット先端の速度ベクトルVcを演算し、これから減速ベクトルVRを演算してブーム1aを制御することで、バケット先端が設定領域に沿って動作する領域制限掘削制御を行う。また、フロント作業機1Aのバケット1cの先端を下げるような操作指示がなされているにもかかわらず、バケット1cの先端位置が以前の位置と同じであると判断されると、領域制限制御の設定値(掘削領域の直線式)を補正するように構成した。
(もっと読む)
ブレード制御装置
【課題】簡易な構成であり、簡単な操作で、基準面に対するブレードの高さを制御することができるモータグレーダのブレード制御装置を提供する。
【解決手段】本発明のブレード制御装置1は、基準面B1の位置を感知するための基準面感知板21Aと、基準面感知板21Aとブレード9を連結するための連結手段22と、ある時刻tにおける測定ポイント26までの距離Dtnを検出するための距離センサ10と、距離センサ10で検出された距離Dtnに基づいて、ある時刻tにおける基準面B1に対するブレード9の現状高さHtnを演算し、ブレード9の現状高さHtnと予め設定されたブレード9の設定仕上がり高さHkとの差ΔHを演算し、ブレード9を現状高さHtnから設定仕上がり高さHkとするための変化量αを算出し、変化量αに基づいてブレード9を昇降させるためのコントローラ30と、油圧ユニット40と、シリンダ50と、を備える。
(もっと読む)
建設機械制御装置
【課題】
1つの回転レーザ装置でレーザ光線を1回転させる間に複数の範囲でレベル設定が可能である様にし、複数の建設機械を1つの回転レーザ装置で制御可能とすると共に、傾斜面を含む整地作業を熟練度に左右されることなく、容易に而も能率よく行える建設機械制御装置を提供する。
【解決手段】
複数の建設機械2の整地作業をコントロールする建設機械制御システムに於いて、前記建設機械の整地器具5の位置制御用のレーザ基準面を変更可能に形成する回転レーザ装置1と、前記建設機械の位置を検知するGPS受信装置68,80と、前記建設機械に設けられレーザ基準面を検知し前記整地器具の位置を制御する器具制御手段73と、前記GPS受信装置の検知に基づく前記建設機械の位置に応じたレーザ基準面を形成する様に前記回転レーザ装置を制御する演算手段52とを有する。
(もっと読む)
作業機械における作業制限制御装置
【課題】 油圧シリンダに設けたテレスコピックアーム(作業装置)7の許容される伸縮長を、作業現場の気象条件に対応させて制限できるようにする。
【解決手段】 GPS制御システムにより油圧ショベル1の現在位置を検出する一方、気象情報に基づいて許容される許容作業条件を予め設定しておき、検出した現在位置がどの許容作業条件に該当するかの判断をし、この判断に基づいてテレスコピックアーム7として許容される伸縮長の範囲までに制限して作業するようにする。
(もっと読む)
作業機械位置合わせシステム、及び作業機械の位置合わせを維持する方法
【課題】作業機械位置合わせシステム、及び作業機械の位置合わせを維持する方法を提供する。
【解決手段】比較的長い距離に亘って所定の作業機械経路に対する作業機械の位置合わせを維持することは、困難となる可能性がある。所定の作業機械経路に対する作業機械の位置合わせを維持するため、本開示内容は、決定された作業機械経路に平行なレーザ垂直面を生じるように動作可能なレーザ発生器と、レーザ受信器群の水平方向のレーザ検知幅内においてレーザ垂直面の位置を検知するように動作可能なレーザ受信器群とを備える作業機械位置合わせシステムを備える。レーザ受信器群の1つ、又はレーザ発生器は、固定位置で作業機械の作業機械本体に取り付けられている。レーザ受信器群は、作業機械位置合わせ支援アルゴリズムを含む電子制御モジュールと通信する。
(もっと読む)
建設機械の計測表示機構
【課題】 建設機械本体の姿勢を算定して建設機械の周辺状況と共に表示手段に正しく表示することができる建設機械の計測表示機構を提供する。
【解決手段】 下部走行体及び上部旋回体を有する車体と地中を掘削する作業機とを備えた建設機械に使用され一対のGPS受信機43,44での計測結果に基づいて作業機のモニタポイントの三次元位置を計測して、車体等を建設機械の周辺状況と共にモニタ46aに表示してオペレータに伝達する建設機械の計測表示機構において、GPS受信機43,44での計測結果に基づいて上部旋回体の姿勢に係る値を演算する旋回体の姿勢演算手段と、この上部旋回体の姿勢演算手段で演算された上部旋回体の姿勢に係る値の水平方向の成分の変化に基づいて上部旋回体に対する下部走行体の姿勢に係る値を演算する走行体の姿勢演算手段を車載コンピュータ46に設けて、車体をモニタ46aに表示する場合に下部走行体及び上部旋回体の各姿勢を表示できるように構成した。
(もっと読む)
位置測定システム
【課題】
作業性に優れ、簡単で安価に基準面を検出でき、又基準面の測定が可能な位置測定システムを提供する。
【解決手段】
既知の点に設けられ上下方向に広がり角を有するレーザ光線40を回転照射する投光光学系と、レーザ光線の反射光を画像受光部上に導く受光光学系とを有する回転レーザ装置1と、前記レーザ光線を前記回転レーザ装置に向けて反射する反射体を有する対象物55と、該対象物の位置を求める為のGPS位置測定装置57と、前記画像受光部の前記反射光の受光位置から対象物に対する高低角を演算し、前記回転レーザ装置の位置情報、前記GPS位置測定装置による位置情報、前記高低角に基づき前記対象物の位置、高さを演算する制御演算部とを具備する。
(もっと読む)
1 - 13 / 13
[ Back to top ]