
Fターム[2D129BA27]の内容
地中削孔 (15,828) | 目的 (2,092) | 監理、管理(調査、設計、計測など) (110) | 計測、検知 (84)
Fターム[2D129BA27]の下位に属するFターム
さく孔しながら行うもの (57)
Fターム[2D129BA27]に分類される特許
21 - 27 / 27
工具状態監視システム
本発明は、少なくとも1個の幾何学的に定義されたブレードとともに作動中に回転する工具要素2、具体的には、材料切削工具要素2を備える工具1に関する。上述工具要素2は作動状態で作動パラメータの影響を受けやすい。測定装置3は、作動パラメータの測定及び作動パラメータの測定信号への変換のために備えられる。第1の測定装置3、31は、本質的に第1の工具要素2、21に対する第1の作動パラメータだけが第1の測定装置3、31によって記録されることができるように作動状態で第1の工具要素2、21と協働する。 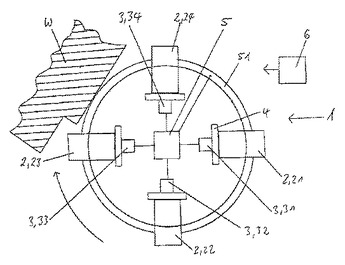 (もっと読む)
(もっと読む)
土壌または岩盤材料に孔を掘削、特にパーカッションまたは回転パーカッション掘削する方法および装置
本発明は、土壌または岩盤材料に孔を掘削、特にパーカッション掘削または回転パーカッション掘削し、孔内にアンカーを固定する方法および装置に関する。この目的を達成するために、掘削される孔は、ドリルロッド(2)に取り付けられたドリルビット(3)によって形成される。本発明によれば、ドリルロッド(2)は、ドリルビット(3)の掘削面(5)から離れる方向に面する後側で、外側寸法が、ドリルビット(3)によって形成された掘削孔の円周を少なくとも部分的に超えるアンカー要素(4)によって、ドリルビット(3)から離れた位置で囲まれ、それによって、アンカーを掘削孔内に構成上簡単でより確実に固定できる。  (もっと読む)
(もっと読む)
たて坑掘削機用方位検出装置及びそれを用いたたて坑掘削時の方位検出方法

【課題】本発明は、角速度計と加速度計を用いて姿勢角と方位角を検出し、方位検出装置を設けたドリルの掘削動作を一定時間毎に停止させ、この時の姿勢角と方位角を記憶させて次の掘削時に用いることにより、高精度の方位角を検出する。
【解決手段】本発明によるたて坑掘削機用方位検出装置及びそれを用いたたて坑掘削時の方位検出方法は、3軸の角速度計(12)と加速度計(13)を用いた方位検出装置(5)で姿勢角と方位角を検出し、ドリル(2)の掘削を一定時間毎に停止させ、停止直前の姿勢角と方位角を記憶し、再起動時に記憶された姿勢角と方位角を読み出して用いる構成と方法である。
(もっと読む)
ドリル穴測定装置および削岩装置
本発明は、ドリル穴測定装置と、この測定装置を装備した削岩装置とに関するものである。測定装置(1)は保護要素(3)を有し、その内側においてセンサ(6)を移送装置(4)によって移送可能である。  (もっと読む)
(もっと読む)
土砂等のサンプル採取方法および装置

【課題】比較的簡単な構成により、所定深度における掘削孔中の土砂サンプルを正確に採取する。
【解決手段】オーガスクリュー1と一体に回転し、かつ、オーガスクリュー1下端部に設けた開閉自在な拡大翼2が開翼すると土砂採取口10が開かれ、閉翼するとシャッター12により土砂採取口10が閉じられる土採取用のパイプ9を使用して掘削孔中のサンプル土砂を採取する。
(もっと読む)
穿孔装置の穿孔位置決め方法及び建設機械の位置計測方法
【課題】中間に障害物が存在していても測量作業に支障を来すことがなく、かつ安価で穿孔装置の位置決めが行える制御方法を提供する。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に超音波発信器8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも3箇所以上に超音波受信器9A〜9Cを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記超音波受信器9A〜9Cの各設置座標を既知とした状態で、前記各超音波発信器8A1、8B1から発せられた超音波を前記各超音波受信9A〜9Cにより受信し、その到達所要時間から前記ガイドシェル12の位置及び方向を求め、前記削岩機13を所定の穿孔位置まで移動させるようにする。
(もっと読む)
コイルドチュービングに光ファイバを用いるシステム及び方法
【課題】杭内ツール及びセンサと地表機器との間で情報を伝達するためのコイルドチュービングに配置された光ファイバ・テザーを有している装置及び係る装置を操作するための方法を提供する。
【解決手段】光ファイバ使用可能コイルドチュービング装置を用いて実行される坑井操作は、光ファイバ・テザーで地表装置から坑内装置に制御信号を送信し、光ファイバ・テザーで少なくとも一つの坑内センサから集められた情報を地表装置に送信し、又は光ファイバ・テザーで観測された光学特性を測定することによって情報を収集することを含む。光ファイバ・テザーに接続された坑内ツール又はセンサは、直接的に光学信号を操作するか又はそれに応答する装置を含みうるか又は通常の原理により動作するツール又はセンサを含む。
(もっと読む)
21 - 27 / 27
[ Back to top ]