
Fターム[2D129HA01]の内容
地中削孔 (15,828) | 掘削のための前処理、後処理 (106) | 位置決め (49)
Fターム[2D129HA01]に分類される特許
41 - 49 / 49
穿孔装置
【課題】 従来の穿孔装置では、案内ロッドを先行孔内に挿入する作業が困難である。
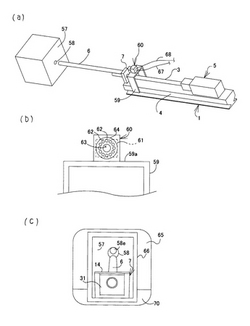
【解決手段】 操縦機2に連結される基台4と、基台に前後移動可能に設けられた削岩機5と、基台の前部に設けられた支持部7と、支持部に連結されて前方に突出する案内ロッド6とを備え、削岩機により削岩機のドリル部3を案内ロッド6の軸線に沿った方向に前後に移動させる穿孔装置において、案内ロッド6及び案内ロッドの前方を撮像する撮像装置61と、撮像装置61からの映像信号を映す表示装置66とを備えたことを特徴とする。
(もっと読む)
穿孔装置

【課題】 従来の穿孔装置では、案内ロッドを先行孔内に挿入する作業が困難である。
【解決手段】 操縦機2に連結される基台4と、基台に前後移動可能に設けられた削岩機5と、基台の前部に設けられた支持部7と、支持部に連結されて前方に突出する案内ロッド6と、案内ロッドと削岩機のドリル部3とを互いに連結する連結部材8とを備え、連結部材が、ドリル部を案内ロッドの軸線に沿った方向に前後にスライド可能とした穿孔装置において、支持部7が、基台4の前部に取り付けられる基台側支持部13と、案内ロッドの後部に取り付けられる案内ロッド取付体14と、基台側支持部と案内ロッド取付体とを互いに連結する連結装置15とにより形成され、連結装置15により案内ロッド6が可動な状態に維持されたことを特徴とする。
(もっと読む)
4足歩行型法面作業ロボット
【課題】本発明は法面作業ロボット本体に働く重力を2本のワイヤー牽引で打ち消し、法面作業ロボット本体が自由に動けるようにするとともに、2本のワイヤーに必要以上の牽引力が作用するのを防止することができる4足歩行型法面作業ロボットを得るにある。
【解決手段】4足歩行型法面作業ロボット本体と、この法面作業ロボット本体を法面の異なる上部位置より吊り下げる一端部がそれぞれウインチに巻き取られた2本のワイヤーと、この2本のワイヤーに加わる張力をそれぞれ測定する2個のロードセルと、法面作業ロボット本体に働く重力を2本のワイヤーの牽引で打ち消し法面作業ロボット本体が自由に動けるように2個のロードセルに加えられる荷重を設定する制御装置とで4足歩行型法面作業ロボットを構成している。
(もっと読む)
下向き続孔穿孔機
【課題】 下向きのスロットを削孔する場合において、水中で泥状化した繰粉を含むスライムを効率良く且つ短時間で吸引し排出することのできる下向き続孔穿孔機を提供することを課題とする。
【解決手段】 ガイドセル(10)と、該ガイドセルに上下方向に移動自在に配設された穿孔ロッド(12、14)と、該穿孔ロッドの下端に取付けられた穿孔ビット(18、20)と、前記穿孔ロッドと平行にかつ上下方向に移動可能に前記ガイドセルに装着されたガイドロッド(22)とを具備し、前記穿孔ロッドは、内部に軸方向の送水通路(12a、14b)を有し、該送水通路を介して前記穿孔ビットに水を供給可能とすると共に、前記ガイドロッドは、内部に吸水通路(22a)を有し且つ前記穿孔ビットよりも下方へ移動可能な下端位置に吸引口(22b)を有し、穿孔作用による繰粉を含む泥水を吸引可能に構成した。
(もっと読む)
コアボーリング装置及びボーリング孔の穿設方法
【課題】 長尺のコアチューブを使用可能とすることにより、ボーリング孔の穿設作業の効率を高める。
【解決手段】 架台20と、架台20に回転可能かつ進退可能に設けられるコアチューブ30と、コアチューブ30を回転駆動させる回転駆動装置2と、回転駆動装置2を進退させる進退駆動装置10とを備える。回転駆動装置2は、駆動モータ3と、駆動モータ3の駆動力をコアチューブ30に伝達させる動力伝達機構5と、動力伝達機構5からの動力を入切させるクラッチ機構とから構成される。駆動モータ3の駆動力を動力伝達機構5及びクラッチ機構を介してコアチューブ30の周面に伝達させることにより、コアチューブ30が回転駆動される。進退駆動装置10を作動させて、回転駆動装置2と一体にコアチューブ30を被切削体35の方向に押圧することにより、コアチューブ30が被切削体35に回転圧入される。
(もっと読む)
建設機械におけるブーム位置決め制御方法
【課題】ブームを作動させるサーボ機構を有しない、既存の建設機械に対して、位置決め制御機能を持たせるようにする。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に発光ダイオード8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも2箇所以上に撮像装置9A、9Bを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記撮像装置9A、9Bの各設置座標を既知とした状態で、前記撮像装置9A、9Bの画像G1,G2に写る発光ダイオード8A1、8B1の座標を3次元画像処理によって求めることにより、前記ガイドシェル12の位置及び方向を計測し、前記削岩機13を所定の穿孔位置まで移動させる。
(もっと読む)
削岩機搭載台車における穿孔位置決め制御方法
【課題】ガイドシェル、ブームを作動させるサーボ機構を有しない、既存の削岩機搭載台車に対して、穿孔位置決め制御機能を持たせるようにする。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に発光ダイオード8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも2箇所以上に撮像装置9A、9Bを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記撮像装置9A、9Bの各設置座標を既知とした状態で、前記撮像装置9A、9Bの画像G1,G2に写る発光ダイオード8A1、8B1の座標を3次元画像処理によって求めることにより、前記ガイドシェル12の位置及び方向を計測し、前記削岩機13を所定の穿孔位置まで移動させる。
(もっと読む)
土作業用のカッター及び方法
【課題】格別に信頼性が高く経済的で中心間距離を調整可能な土作業カッターを提供し、またその種の土作業カッターを用いて格別に信頼性が高く経済的な土作業方法を提供する。
【解決手段】土作業カッター20及び土作業方法を提供するに当たり、少なくとも2個の掘削車輪41,41’を掘削装置骨格22上に回転駆動可能に配置し支持させる。その際、掘削車輪41,41’の回転軸43,43’が互いに平行になるようにする。これら回転軸43,43’同士の中心間距離を、ニーレバー機構28,28’を備える調整装置によって調整する。
(もっと読む)
穿孔装置の穿孔位置決め方法及び建設機械の位置計測方法
【課題】中間に障害物が存在していても測量作業に支障を来すことがなく、かつ安価で穿孔装置の位置決めが行える制御方法を提供する。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に超音波発信器8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも3箇所以上に超音波受信器9A〜9Cを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記超音波受信器9A〜9Cの各設置座標を既知とした状態で、前記各超音波発信器8A1、8B1から発せられた超音波を前記各超音波受信9A〜9Cにより受信し、その到達所要時間から前記ガイドシェル12の位置及び方向を求め、前記削岩機13を所定の穿孔位置まで移動させるようにする。
(もっと読む)
41 - 49 / 49
[ Back to top ]