
Fターム[2F051AC01]の内容
特定の目的に適した力の測定 (5,882) | 電気回路 (196) | 検出部 (81)
Fターム[2F051AC01]に分類される特許
1 - 20 / 81
操舵トルク検出装置、操舵トルク検出方法及び電動パワーステアリング装置
【課題】トルクセンサを用いずに操舵トルクを検出することができる操舵トルク検出装置及び操舵トルク検出方法、並びにトルクセンサを複数設けることなく2重系を構築することができる電動パワーステアリング装置を提供する。
【解決手段】モータ回転角センサ13の検出信号S1の周期と操舵角センサ18の検出信号S2との周期をそれぞれカウントし、それぞれの絶対角度を算出する。そして、これらの絶対角度の相対角度から操舵トルクT0を算出する。算出した操舵トルクT0とトルク検出値Tiとを比較することで、トルクセンサ3の異常を検出し、トルクセンサ3の正常時にはトルク検出値Tiを用いて操舵補助制御を行い、トルクセンサ3の異常発生時には、トルク検出値Tiに代えて操舵トルクT0を用いて操舵補助制御を行う。
(もっと読む)
複列転がり軸受ユニット用予圧推定装置及び予圧推定装置付複列転がり軸受ユニット

【課題】車輪支持用複列転がり軸受ユニット1に作用するアキシアル荷重を求める事なく、各転動体7、7に付与されている予圧を推定できる構造を実現する。
【解決手段】外輪3とハブ4との列間ラジアル変位である列間上下変位を測定する列間ラジアル変位測定手段と、この列間ラジアル変位測定手段が測定した列間上下変位に基づいて前記予圧を推定する予圧推定手段とを設ける。この予圧推定手段は、例えば、前記列間上下変位の最小値の移動平均値の変化に基づいて前記予圧を推定する様に構成する。
(もっと読む)
センサ付車輪用軸受
【課題】 センサの非線形特性を補正して荷重推定誤差を低減させつつ、様々な入力荷重状態に応じて連続的な推定荷重値を演算し、できるだけ小さな検出時間遅れで推定荷重値を出力できるセンサ付車輪用軸受を提供する。
【解決手段】 車輪用軸受の外方部材1と内方部材2のうちの固定側部材にセンサユニット20A,20Bを設ける。センサユニットは、固定側部材に接触固定される3つ以上の接触固定部を有する歪み発生部材と、この歪み発生部材に取付けられて歪みを検出する2つ以上のセンサとでなる。車輪用軸受に作用する荷重を、センサ出力信号の平均値から演算する第1の荷重推定手段31と、センサ出力信号の平均値と振幅値とから演算する第2の荷重推定手段32と、これらの荷重推定手段の演算結果を車輪回転速度に応じた比率で合成して推定荷重値を出力する推理荷重出力手段33とを設ける。
(もっと読む)
感圧センサアレイの制御回路及び関連する方法
【課題】より高い精度及び/又はより高速の走査速度を提供することができる回路及び関連する方法を提供する。
【解決手段】圧力又は力応答センサアレイを走査する制御回路が開示される。圧力又は力応答センサ素子のアレイで形成される圧力センサ又は力センサを使用して、負荷印加に応答して圧力測定又は力測定を得ることができる。制御回路は、センサ素子からの信号をサンプリングして、センサアレイの1つ又は複数のセンサ素子での圧力又は力を検出することができる。本明細書における回路は、比較的より高速の走査速度を提供することができる。ユーザは、センサアレイのセンサ素子の走査対象となる1つ又は複数のサブセットを定義することができる。センサ特性を調整する様々な方法及び関連回路も開示される。
(もっと読む)
トルク算出装置
【課題】車両において、比較的高精度にダンパの負荷トルクを算出する。
【解決手段】トルク算出装置(100)は、モータの角加速度を検出する角加速度検出手段(21)と、モータのトルクであるモータトルクを検出するモータトルク検出手段(21)と、クランクシャフト(15)の回転角である第1回転角を検出する第1回転角検出手段(21)と、インプットシャフト(16)の回転角である第2回転角を検出する第2回転角検出手段(21)と、検出された第1回転角に基づくクランクシャフトの回転数変化が第1所定値より大きい、又は検出された第2回転角に基づくインプットシャフトの回転数変化が第2所定値より大きいことを条件に、検出された角加速度、検出されたモータトルク及びモータの慣性モーメントに基づいて、ダンパ(14)の負荷トルクを算出する算出手段(21)とを備える。
(もっと読む)
張力測定方法及び張力測定装置
【課題】簡易な物理モデルを用いて帯状体の張力分布を高精度に求めることができる張力測定方法及び張力測定装置を提供する。
【解決手段】荷重が付加された帯状体1の幅方向に並ぶ複数の測定点30における変位特性を計測し、帯状体1について、測定点30に対応する節点41と該節点41に接合され該節点41に作用する張力を模擬した分布ばね43とを有する2次元の多質点系モデル40にモデル化し、多質点系モデルにおける固有値及び固有ベクトルを解析し、変位特性に基づく固有振動数及び振動モードベクトルと固有値及び固有ベクトルとが夫々一致するような分布ばね43のばね定数を算出し、ばね定数から張力を算出する。
(もっと読む)
パワーステアリング用トルクセンサ及びこれを備える電動式パワーステアリング装置
【課題】簡素な構成で且つ消費電力を格段に抑え得るパワーステアリング用トルクセンサ及び電動式パワーステアリング装置を提供する。
【解決手段】トルクセンサTSは、3箇所にコイルが配列され、異なる接点に信号ラインが各々接続されている。ここで、ハンドルが「Lc→Lb→La(右回転方向)」へ操作されると、信号ラインL1から動作信号Sg1が出力され、その後、信号ラインL2から動作信号Sg2が出力される。一方、ハンドルが「La→Lb→Lc(左回転方向)」へ操作されると、信号ラインL2から動作信号Sg2が出力され、その後、信号ラインL1から動作信号Sg1が出力される。そして、信号処理回路400では、動作信号Sg1,Sg2に基づいてトルク信号Stと方向信号Srとを生成出力させる。
(もっと読む)
電動機のトルク推定システム及びその推定方法
【課題】本発明の課題は、機械システム内で発生する各種トルクを高精度に推定するトルク推定システム及びその方法を提供することにある。
【解決手段】機械システム内に設置した電動機用センサ,機構用センサおよびその計測データを分析するモデル推定器により達成される。すなわち、電動機用センサにより角速度などの電動機の状態量、機構用センサにより荷重などの機構の状態量を計測し、そのデータに基づいて多変量解析やシステム同定などの手法で機械システムのモデルを推定することにより、機械システム内で発生する各種トルクを推定することができる。
(もっと読む)
力覚センサ用チップおよび加速度センサ用チップ
【課題】低電圧で、かつ、タイムラグおよび温度ムラなく歪検出用抵抗素子の発熱を促進することができ、これにより電圧印加後から定常状態になるまでの時間を大幅に短縮することができる力覚センサ用チップを提供することを目的とする。
【解決手段】本発明に係る力覚センサ用チップ100は、外力を検出するための力覚センサ用チップ100であって、外力が印加される作用部11と、作用部11を周囲から支持する支持部12と、作用部11と支持部12とを連結する連結部13と、を有するベース部材10と、前記外力が印加された場合におけるベース部材10の変形発生部に形成された複数の歪検出用抵抗素子Sと、歪検出用抵抗素子Sの上層に、抵抗素子用配線21および層間絶縁膜25を介して形成された薄膜抵抗22と、から構成される。
(もっと読む)
触覚センサ
【課題】 コイルを変形させることなしにインダクタンスを大きく変化させることにより,耐久性に優れた高感度の触覚センサを提供する。
【解決手段】 複数のコイルとコイルに対向配置した複数のコンデンサ電極と、コイルとコンデンサ電極の間に触覚などの外力の大きさに応じてコイルとの接触面積が変化する変形自在な導電性の弾性体を配置する。
(もっと読む)
力覚センサ
【課題】複数のベクトル量を検出できるセンサを提供する。
【解決手段】力覚センサ201では、テーブル203の可動を受ける3自由度を有する軸受け206と、軸受け206の可動を受ける2自由度を有する軸受け207と、ベース202に固定され、軸受け207の可動を受けるアーム205と、一端が軸受け206と接続され、他端が軸受け207と接続されたロッド204と、を含んで、テーブル203とベース202とが連結されている。この力覚センサ201は、アーム205の変位および/または変形を検出する検出素子208と、検出素子208の検出値を成分とする行列Dから、力を示すベクトルFへ変換するための係数行列Gを用いて、
F=G・D
からテーブル203に作用する力の大きさおよび/または方向を計算する演算部を有する回路基板210と、を備えている。
(もっと読む)
センシング装置および電子機器
【課題】ノイズに強く、感度が十分に高いセンシング装置を提供する。
【解決手段】センシング装置100は、制御線CA1〜CA240,CB1〜CB240と、感知データ線SL1〜SL320と、制御線CA1〜CA240と感知データ線SL1〜SL320との交差に対応して設けられた複数のセンサ回路Qと、感知データ線SL1〜SL320に対応して設けられた複数の増幅回路Wとを備える。センサ回路Qは、対応する制御線を介して供給される制御信号によって制御され、対応する感知データ線へセンシング信号を出力する。増幅回路Wは、一方の入力端子には対応する感知データ線からの信号が供給され、他方の入力端子には参照用信号が供給される差動増幅器を備える。感知データ線SL2〜SL320に対応する増幅回路Wは、対応する感知データ線の隣の感知データ線からの信号を参照用信号とする。
(もっと読む)
センシング装置および電子機器
【課題】ノイズに強く、感度が十分に高いセンシング装置を提供する。
【解決手段】センシング装置100は、制御線CA1〜CA240,CB1〜CB240と、感知データ線SL1〜SL320と、制御線CA1〜CA240と感知データ線SL1〜SL320との交差に対応して設けられた複数のセンサ回路Qと、感知データ線SL1〜SL320に対応して設けられた複数の増幅回路Wとを備える。センサ回路Qは、対応する制御線を介して供給される制御信号によって制御され、対応する感知データ線へセンシング信号を出力する。増幅回路Wは、対応する感知データ線からの信号と参照用信号との差分電圧を線形増幅する増幅器を備える。感知データ線SL2〜SL320に対応する増幅回路Wは、対応する感知データ線SL1の隣の感知データ線からの信号を参照用信号とする。
(もっと読む)
センサ付車輪用軸受
【課題】 コンパクな構成で車輪の軸受部にかかる荷重を正確に検出できるセンサ付車輪用軸受を提供する。
【解決手段】 車輪用軸受の外方部材1と内方部材2のうちの固定側部材にセンサユニット20を設ける。センサユニット20は、固定側部材に接触固定される2つ以上の接触固定部を有する歪み発生部材21と、この歪み発生部材21に取付けられて歪み発生部材21の歪みを検出する1つ以上のセンサ22とでなる。このセンサ22の出力信号を直接にAD変換する少なくとも20ビット以上の分解能を持つAD変換器29を車輪用軸受上に設ける。このAD変換されたセンサ22の出力信号から車輪に加わる荷重を推定する推定手段30を設ける。
(もっと読む)
衝突検知装置
【課題】 車両に搭載された機器(例えば、インバータ)に作用する衝撃を検知することができる衝突検知装置を提供する。
【解決手段】 車両に搭載された電力変換機(11,12)に対して、車両の衝突時に作用する外力を検知するための衝突検知装置であって、電力変換機に取り付けられ、密閉状態で気体を収容するチャンバ(20)と、チャンバの内部における圧力変化を検知するための圧力センサ(30)と、を有する。一方、複数の導電部材(62,63)と、複数の導電部材を収容し、電力変換機に取り付けられる収容部材とにより、衝突検知装置を構成することができる。この場合には、収容部材が外力を受けて変形することに応じて、複数の導電部材を、互いに接触させて導通状態とすればよい。
(もっと読む)
転がり軸受ユニットの状態量測定装置の製造方法
【課題】それぞれが同じ種類の転がり軸受ユニットを備えた多数の製品を製造する場合に、これら各製品に関するアキシアル荷重の算出精度と、これら各製品の生産効率とを、両立して良好にできる製造方法を実現する。
【解決手段】演算器が1対のセンサ9a、9bの出力信号同士の間の位相差比に基づいて転がり軸受ユニットに作用するアキシアル荷重を算出する際に使用する、これら位相差比とアキシアル荷重との関係に関する零点及びゲインのうちの、ゲインは、上記転がり軸受ユニットの種類等に応じて予め用意しておいた、上記各製品に共通のものを、これら各製品の演算器のメモリ中に記録する。一方、上記零点は、上記各製品の製造過程で、これら各製品毎に求めたものを、これら各製品の演算器のメモリ中に記録する。この様な構成を採用する事により、上記課題を解決する。
(もっと読む)
電磁結合度の変化を検出して入力体情報を検出する入力体情報検出装置
【課題】入力体の入力に応じて電磁結合度が変化する位置以外での電磁結合の漏れやセンサ部等のばらつきを補償することにより検出感度を高めた入力体情報検出装置を提供する。
【解決手段】入力体情報検出装置は、センサ部10と駆動部20と検出部30と記憶部40と演算部50とからなる。検出部30は、電磁結合部の電磁結合度を、センサ部の複数の検出ループ配線から出力される検出信号の振幅と位相を含むベクトルとして検出する。記憶部40は、駆動部により基準となる駆動信号でセンサ部を駆動したときに、検出部により検出されるベクトルを、基準ベクトルとして記憶する。演算部50は、駆動部により所定の駆動信号でセンサ部を駆動したときに、検出部により検出されるベクトルと記憶部に記憶される基準ベクトルとをベクトル演算することにより電磁結合度の変化を算出し、センサ部に入力される入力体の入力体情報を検出する。
(もっと読む)
超音波送受信素子および超音波送受信シート
【課題】湾曲自在なシートに複数配置することが簡易な構造の素子を提供する。
【解決手段】超音波送受信素子20を、圧電効果を有する高分子材料により長方形の薄板状に形成された送受信部材22と、送受信部材22の一方の端部24にドレイン36の電極38が電気的に接続された有機トランジスタ30と、送受信部材22の他方の端部26を有機トランジスタ30側から押し上げるようにして送受信部材22を湾曲させる湾曲部材40とにより構成する。有機トランジスタ30は印刷技術によりシートにマトリックス状に形成することができ、送受信部材22はその固定端である一方の端部24を連結することによりマトリックス状に配置してシート状に形成することができ、湾曲部材40も連結することによりマトリックス状に配置してシート状に形成することができるから、湾曲自在なシートに超音波送受信素子20を複数配置することができる。
(もっと読む)
信号出力装置および信号入力装置
【課題】システムの回路構成を単純化する。
【解決手段】アクティブマトリクス回路は、行状の選択線と、列状の信号線と、両者の交差部に配された能動素子と、各選択線を順次走査して能動素子を選択する為の選択パルスを出力する垂直走査回路と、各信号線を開閉制御するための制御パルスを出力して選択された能動素子に対する信号の入力又は出力を行なう水平走査回路とを有する。垂直走査回路は、入力されたスタートパルスVSTをクロック信号に応じて順次先頭段から後尾段に転送して選択パルスを形成する転送回路22と、後尾段から出力された選択パルスを処理して、内部的にスタートパルスVSTを形成し転送回路22の先頭段に入力するスタートパルス発生回路21とを有する。又、外部から供給されるリセットパルスに応答して強制的にリセットし、初期状態に復帰させるリセット回路を備えている。
(もっと読む)
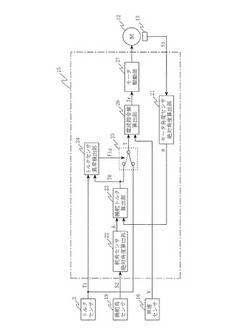
電動パワーステアリング装置
【課題】操舵時の音や振動を低減し操舵フィーリングを向上させた電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置1は、EPS制御部20において、A−D変換器31は、トルクセンサ5からのトルクセンサ信号をA−D変換し、LPF32によって濾波した後に、このトルクセンサ信号に基づいて、EPS制御部20のアシスト制御部38などが目標電流を演算し、モータ7を駆動することで車両の操舵をアシストする。A−D変換器31では、電動パワーステアリング装置1の制御周期よりも短い周期でサンプリングを行い、トルクセンサ信号のA−D変換を行う。
(もっと読む)
1 - 20 / 81
[ Back to top ]