
Fターム[2F065AA59]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 体積;容積 (162)
Fターム[2F065AA59]に分類される特許
161 - 162 / 162
強化現実システムにおけるオーバーレイ・エラーの測定方法と、その計測システム
ビデオ強化現実改善外科ナビゲーション・システムにおけるオーバーレイ・エラーを測定するシステムと方法を提供する。本発明の実施例において、システムと方法は、テスト対象物を供給し、このテスト対象物のコンピュータ・モデルである仮想対象物を生成し、テスト対象物を記録し、強化現実システムの測定空間内での様々な位置でのテスト対象物上の制御点の画像を取得し、その取得画像からテスト対象物上の制御点の位置を引き出し、仮想画像内の制御点の位置を計算し、テスト対象物のそれぞれのビデオと仮想画像との間の対応する制御点の位置の位置ずれを計算することによる。この方法とシステムは、さらに、オーバーレイ精度が許容基準を満たしているかどうか評価する。本発明の実施例において、方法とシステムは、そのようなシステムにおけるエラーの様々な要因を見分けるために提供される。本発明の実施例において、ARシステムの精度が決定された後、そのARシステムは、与えられた用途、たとえば、記録エラーのような他のプロセスの精度を評価するツールとして使用される。  (もっと読む)
(もっと読む)
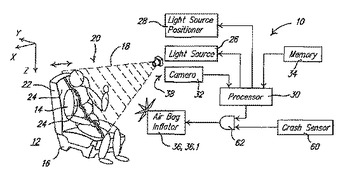
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
161 - 162 / 162
[ Back to top ]