
Fターム[2F065HH05]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196) | スリット光;帯状光 (915)
Fターム[2F065HH05]に分類される特許
901 - 915 / 915
3次元形状測定装置および方法

【課題】 投影装置の光軸と同じ方向から観測する第1カメラの撮影画像のエッジ抽出エラーを抑制する。
【解決手段】 投影装置10のストライプパターンをフレームメモリ110から読み出して基準ストライプパターンメモリ111に書き込み、書き込んだストライプパターンを再コード化により補正する。第1カメラ20のパターン画像からストライプを抽出し、各ストライプをストライプ幅毎に縦方向に分割し、セルを生成する。画像の中心から順に対応する各セル間の強度を比較し、対象物の反射率などの要因によってパターンが変化してセル間の強度が閾値以上異なった場合には新たなコードの生成、割り付けを行い、基準ストライプパターンメモリ111のストライプパターンを補正する。ストライプパターンには固有のエッジが設定されており、対象物の表面形状やテクスチャによって変化することがないので、正確なエッジ座標を取得でき、エッジ検出誤差の問題がない。
(もっと読む)
麦芽アルコール飲料の泡の粒径を測定する方法及び装置
本発明は、麦芽アルコール飲料の泡の品質を客観的に判定することができる、麦芽アルコール飲料の泡の粒径を測定する方法及び装置を提供する。本発明による麦芽アルコール飲料の泡の粒径を測定する装置は、麦芽アルコール飲料に形成された泡層の表面にライン状レーザービームを照射するレーザー光源5と、前記泡層の表面に映されたレーザーラインを撮影して、前記レーザーラインの画像を取得する撮像デバイス4と、前記レーザーラインの画像から前記レーザーラインのエッジ情報を取得し、前記エッジ情報に基づいて前記泡層の泡の粒径を算出する算出デバイス6とを含む。 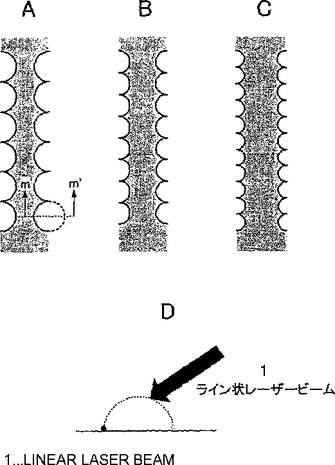 (もっと読む)
(もっと読む)
欠陥検出装置

【課題】外周面に凹凸のある検出体であっても、確実に異物などの欠陥を自動的に検出することができる欠陥検出装置を提供する。
【解決手段】検出体1における表面検出点6を含む水平面7に対して所定の角度で検出点に光を照射する光源2と、検出体1の検出点6の状態が正常であるときには、検出点で反射した正反射成分は受光せず、検出点に欠陥があるときには、その欠陥部分に当たって反射した正反射成分を受光する位置に配置される光センサ3と、光センサ3が受光した光で画像を生成して処理する画像処理装置5とを備える。画像処理装置5は、光センサ3で受光した光に基づいて検出体1の検出面画像を生成する画像生成部53と、この検出面画像から欠陥の特徴量を抽出して、欠陥の有無を判断する判断部(二値化処理部54と判定部55)とを備える。
(もっと読む)
加工装置
【課題】 照明手段を配置するために大きなスペースを要することなく、ウエーハの全体の輪郭を確実に認識することができる輪郭認識機能を備えた加工装置を提供する。
【解決手段】 中央部に開口を備えた環状の支持フレームに装着された透明乃至半透明の保護テープの表面に被加工物が支持された被加工物組立体の被加工物を加工する加工装置であって、被加工物組立体を収容するカセットを載置するカセット載置テーブルと仮置きテーブルとの間に配設され支持フレームの開口における該搬出手段の搬出方向と直角な方向の最大長以上の長さと該最大長さより短い幅を有する帯状の発光手段と、帯状の発光手段と対向して配設され該帯状の発光手段との間に位置付けられた該被加工物組立体の被加工物の輪郭を撮像する撮像手段と、撮像手段によって撮像された画像情報に基づいて被加工物全体の輪郭を認識する輪郭認識手段とを具備している。
(もっと読む)
レンジ検査のための測定装置および方法
本発明は、レンジデータの取得および解析を用いて物体(1)の3次元の特性を測定するための画像化装置および方法に関する。画像化装置は、測定開始前に、レンジデータの取得および解析を構成するための手段と、画素を含む少なくとも1つのセンサ(5)を用いて上記の物体(1)の画像からの反射光を検出することによって、上記の物体(1)の画像を作成するための手段と、センサの画素単位で測定された作成画像から上記の物体(1)のレンジデータを取得するための手段と、取得したレンジデータをセンサの画素値から世界座標に較正するための手段と、レンジデータを一様に離隔されたグリッドに再サンプリングすることによって、較正されたレンジデータを矯正するための手段と、較正および矯正の施されたレンジデータを解析して、上記の物体(1)の3次元の特性を得るための手段と、を備える。  (もっと読む)
(もっと読む)
アイテムの選択セグメントの体積に対応する数値表示を示すための装置及び方法
【解決手段】アイテムの未切断選択セグメントの重量又は価格を表示する装置及び方法は、位置指示部材を、支持面上に位置するアイテム上方を通過させることを含む。位置指示部材は、一つ以上のセンサを有し、そのセンサが、上記部材が基準位置からアイテム上方の選択された他の位置まで横断される際に、アイテムの連続する横断面輪郭に対応し、アイテムの選択セグメントを規定する信号を生成する。同時に、好ましくは一つ以上の微小構造電子機器(MEMS)加速度計装置から構成された作動検出器配置構造は、アイテムに沿って位置指示器支持部材が移動したときにその作動に対応する信号を生成する。これらの信号は、指示部材の選択された連続位置間に位置するアイテムの未切断選択セグメントの体積を決定すべく、信号処理装置で処理される。これらの累積的な体積決定のそれぞれは、数値重量に変換される、又は、特定のセグメントをアイテムから切断する前に、重量又は価格の情報が見ている顧客に同時に提供される。可視光帯は、センサ・バーからアイテムの特定のタイプの密度要素に基づく部分価格値上に投影され、それにより、部材が上記アイテムに沿って横断されたときに数値的な重量又は(重量に基づく)価格値が表示され、したがってアイテムのオペレータが数値表示に対応する選択セグメントの境界を観察者に明確に示すことが可能となる。 (もっと読む)
直径測定デバイス
フェルールクリンプ(80)によりカン(10)に取り付けられる吸入カンバルブ(30)のうち、無機能の可能性のある吸入カンバルブ(30)の検出方法であって、直径測定手段(230)に対して所定の測定高さにカン(10)を保持するために配置されるカン治具(220)内にカン(10)を配置し、所定の高さでフェルールクリンプ(80)の直径を測定し、測定されたクリンプの直径を、容認されるべき所定の間隔と比較し、もし測定された直径が所定の間隔を外れる範囲にあれば、吸入カンバルブ(30)を無機能の可能性のあるものとして判別するステップを有している方法。また、基部(210)と、上記基部(210)により支持される直径測定手段(230)と、上記基部(210)により支持されるカン治具(220)であって、上記直径測定手段(230)に対して所定の測定高さで、その内部にカン(10)を保持するように構成されたカン治具(220)と、を有しているクリンプ直径測定デバイスも提供される。 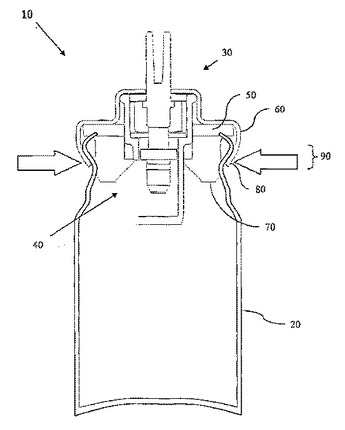 (もっと読む)
(もっと読む)
高さ三角法測定方法及びシステム
高さ三角法測定方法及びシステムが開示されている。当該方法及びシステムは、表面上の物体、例えばバンプ又は小さいウェーハの高さを測定するのに特に有効である。3つのステップが測定を行う。第1のステップは、物体を既知の角度から空間的に非コヒーレントの狭い帯状光でもって照射するステップであり、当該既知の角度が当該光の帯に沿った大きい開口数と前記光の帯に対して垂直方向の小さい開口数とを有する。第2のステップは、物体を、光の帯に沿った大きい開口数と光の帯に対して垂直方向の小さい開口数とを有する既知の角度からイメージングして、物体及び光の帯を含む像を有するステップである。最後のステップは、物体の高さを像上の光の帯の位置から計算するステップである。  (もっと読む)
(もっと読む)
分配システムにおける測定装置および方法
本発明は、担体に置かれた対象物の存在、位置および/または形状の測定を可能にする測定装置システムならびにかかる測定のため方法の分野に関する。測定装置には、入射光で前記対象物および前記担体を照射するように配置された少なくとも1つの光源と、前記少なくとも1つの光源から所定の距離に置かれた少なくとも1つのセンサであって、前記担体が前記移動方向に移動されるときに前記対象物および前記担体からの反射光を検出することによって、前記対象物および前記担体を繰り返し測定するように、かつ検出光を電気信号に変換するように構成された少なくとも1つのセンサと、電気信号を用いて、前記対象物および前記担体の測定のそれぞれの三次元サブ画像を得るように、かつ1つまたは複数の前記取得サブ画像から、前記対象物および前記担体の三次元画像を得るように構成された画像処理ユニットと、前記三次元画像から、前記担体における前記対象物の存在、位置および/または形状を決定するように構成された計算ユニットと、が含まれる。  (もっと読む)
(もっと読む)
容器傾斜度の光学式検査
容器(34)の傾斜度を検査する装置は、容器の下に位置決めされていて、容器を定位置に保持しているとき及び容器を軸線(A)回りに回転させているときに光エネルギー(60)を容器底(62)に差し向ける光源(50)を有する。容器(34)の下方に位置決めされた光センサ(54)が、容器底(62)から反射した源(50)からの光エネルギーを部分的に受け取る。情報プロセッサ(56)が、反射光エネルギーと容器の回転の組合せ関数として軸線(A)に垂直な平面からの要素底(62)のずれを求めるために光センサ(54)に結合されている。容器(34)は好ましくは、定位置に保持され、駆動ローラ(24)によって軸線回りに回転し、この駆動ローラは、容器(34)を軸方向に間隔を置いたバックアップローラ(26,28)に押し付けて容器(34)の幾何学的形状及びバックアップローラ(26,28)の間隔の関数として平均回転軸線を定める。  (もっと読む)
(もっと読む)
三次元物体を走査するための装置
物体の三次元モデルを構築するための走査システム及び方法であって、走査システムは走査装置(2)と走査テンプレート部材(4)とを含む。走査装置(2)は光を投影するためのエミッター(20)と像を撮像するためのセンサー(22)とを有し、エミッターとセンサーが使用時に相対的に固定された位置に配置される。走査テンプレート部材(4)は既知の二次元テンプレート(42)を有する。処理手段は、データを生成して走査装置(2)と走査テンプレート(42)との間に配置された物体(8)の三次元モデルを構築することができ、使用時に走査テンプレート(42)に対する物体(8)の情報を生成し、この情報はエミッターによって投影光が投影される同一の像から生成される。測定は同一の基準面に対して行われる。 (もっと読む)
自動車のフード状部とその他の自動車ボディとの間の隙間寸法およびオフセットの少なくとも一方を調整するための方法および装置
本発明は、自動車の可動のフード状部(2)と該自動車の残りのボディ(3)との間の隙間寸法およびオフセットの少なくとも一方を調整するための方法および装置(1)に関する。フード状部(2)はまず粗調整された組付け位置で前記ボディ(3)に対してできるだけ同一平面となるようはめ込まれかつ保持される。さらに前記フード状部は、隙間寸法および/またはオフセットについてのあらかじめ定義された値ができるだけ正確に守られるように微調整される。隙間寸法および/またはオフセットをできるだけ非接触で、できるだけ簡単かつ迅速に、かつ柔軟に調整することができるようするために、微調整のために、フード状部(2)と残りのボディ(3)との間の隙間寸法および/またはオフセットについての実測値(21_ist)が光学的に検知される。隙間寸法および/またはオフセットについての検知された実測値(21_ist)とあらかじめ設定された目標値(21_soll)に従って、少なくとも1つのアクチュエータ(12)のための制御信号(24)が求められる。  (もっと読む)
(もっと読む)
シート表面の分析装置と分析方法
本発明はシート表面分析装置(10)に関する。分析装置はシート表面に陰影を投射させる照明手段(32)と、陰影の画像を撮影する撮影手段(36)と、撮影された画像を分析し、シート表面を分析する分析手段(40)と、シートを湾曲させる湾曲手段(22)とを含む。照明手段と湾曲手段は、シート表面の湾曲部に陰影が投射されるようにアレンジされている。撮影手段はその陰影を撮影するようにアレンジされている。 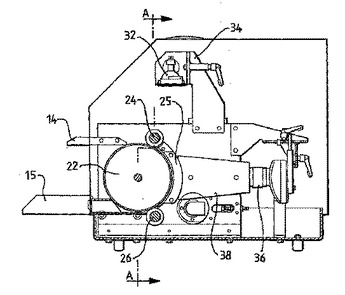 (もっと読む)
(もっと読む)
距離情報入力装置
【課題】本発明は、クロストークの低減された高精度な距離情報を取得可能にする距離情報入力装置を提供する。
【解決手段】本発明の一態様によると、輝度変調光源によって輝度変調された光が照射された前記対象物からの反射光を受光し、光電変換を行うと共に、前記輝度変調光源と同期して感度変調可能な受光素子を備えた距離情報入力装置において、前記受光素子は、光電変換部と、二つの電荷蓄積部と、二つの電荷振り分けゲートと、二つの電荷検出部と、二つの電荷転送部とを有し、前記受光素子のリセット動作と前記電荷蓄積部に蓄積された電荷を読み出す読み出し動作との間に、前記電荷振り分けゲートをオフして前記電荷蓄積部のポテンシャルを上げることによって飽和電荷量以上の余剰電子を排出する動作を少なくとも一回行なうことを特徴とする距離情報入力装置が提供される。
(もっと読む)
実立体モデル作成装置、立体データ作成装置、疑似立体データ作成装置並びにその方法
【課題】 レーザ光を対象物上にスキャンして三次元形状データを得るには、そのスキャンにかなりの時間がかかりその間対象物が静止している必要があり、人物などの三次元形状データを得るのは、難しいという問題があった。
【解決手段】 データ入力部10において、カメラを用い対象物の複数の画像を得る。この画像に基づいて、モデリング部12において、色彩データを含む三次元形状データを得る。この三次元形状データに基づいて成形部14において実立体モデルを成形する。これは切削や成形型による成形によって行われる。そして、色づけ部16により、色彩データに基づいて、実立体モデルに対し色づけが行われる。
(もっと読む)
901 - 915 / 915
[ Back to top ]