
Fターム[2F065LL10]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | レンズ;レンズ系 (2,973) | その他の特殊レンズ (439)
Fターム[2F065LL10]に分類される特許
201 - 220 / 439
光学式測定装置
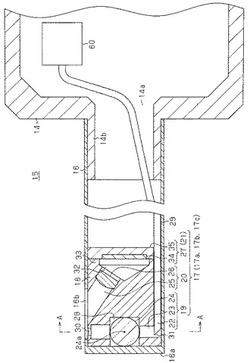
【課題】プローブのより先端側にて穴の内径を測定することができる光学式測定装置を提供する。
【解決手段】ワーク等の被測定物に設けられた穴の内径を測定する光学式測定装置の構成に関し、この光学式測定装置は、被測定物の穴の内壁面に向けて基本光を照射する照射部19と、前記内壁面で反射された散乱光をプローブ15の内部に導入させるための導入部20と、この導入部20に導入された前記散乱光を受光する受光部21とを備えてなる非接触式のプローブとを備えている。また、プローブ15が穴の内部に挿入された状態で、受光部21を構成する受光素子27上における前記散乱光の受光位置に基づいて、内壁面の反射位置を円周に含む仮想円を算出する演算手段とを備えている。そして、プローブ15内において、照射部19を、導入部20及び受光部21よりも先端側に配置した。
(もっと読む)
被検査体の検査装置

【課題】被検査体における被検査面の立体形状を高速かつ高精度に把握することが可能な被検査体の検査装置を提供する。
【解決手段】基板検査システムにおいて、第1走査ユニット30のラインセンサ38は、テレセントリックレンズ40を介して基板2の被検査面を垂直に見た映像を走査する。第2走査ユニット32のラインセンサ38は、被検査面と垂直な方向から第1角度αだけ第1方向側に傾いた角度で基板2の被検査面を見た映像を走査する。第3走査ユニット34のラインセンサ38は、被検査面と垂直な方向から第2角度βだけ第2方向側に傾いた角度で基板2の被検査面を見た映像を走査する。判定部は、第1走査ユニット30、第2走査ユニット32、および第3走査ユニット34によって取得された画像データを利用して基板2の被検査面の高さを算出する。
(もっと読む)
光学系、パターン検査装置、パターンの検査方法、パターンを有する物品の製造方法
【課題】干渉縞の発生を大幅に抑制することができる光学系、パターン検査装置、パターンの検査方法、パターンを有する物品の製造方法を提供する。
【解決手段】入射する光を複数のビームに分割するインテグレータユニットと、前記インテグレータユニットを光軸の回りに回動させる第1の駆動手段と、前記インテグレータユニットの出射側に設けられ、互いに光路長が異なる複数の凹部を有する回転位相板と、前記回転位相板を回転させる第2の駆動手段と、を備えたことを特徴とする光学系が提供される。
(もっと読む)
微細構造化製品を製造する方法
本発明により、両面微細構造化製品を製造する方法、及びこの方法のために使用することができる位置決め構造が提供される。この方法には、基板シート50の第1の表面に一次製品フィーチャ80を提供するステップ800と、反対側の表面に二次製品フィーチャ90を提供するステップ810と、位置合わせパラメータを推定するために、一次製品フィーチャ及び二次製品フィーチャ80、90の相互位置合わせを表示するステップ820と、一次製品フィーチャ及び二次製品フィーチャ80、90の準備を位置合わせさせるステップ830が含まれている。位置決め構造は、第1の表面に集束エレメント20の位置決めアレイを備えており、また、反対側の表面に、一次製品フィーチャ及び二次製品フィーチャ80、90と位置合わせされた、製品フィーチャの80、90の位置合わせを推定するために基準オブジェクト30のホログラフィ表現10を提供する、基準オブジェクト30の位置決めアレイを備えている。  (もっと読む)
(もっと読む)
3次元形状測定装置
【課題】 装置の機械的な動きを伴うことなく3次元の形状を測定することが可能な3次元形状測定装置を提供すること。
【解決手段】形状測定装置1は、所定の波長帯域の中で波長を変えて光を出力することができる光源2と、繰り返しパターンを有する2次元チャート3と、所定の量の色収差を有し、光源2から出力された光によって照明された2次元チャート3の像を被測定体Sに投影する対物光学系7と、被測定体Sで散乱された2次元チャート3の投影像を撮像する撮像装置10〜12と、保存されたチャートデータ及び対物光学系7の色収差量に基づいて被測定体Sの3次元形状を算出する制御ユニット13とを備える。撮像装置10〜12はまた、2次元チャート3の投影像を得た際の光源2からの出力光の波長に対応させて、撮像された2次元チャート3の投影像をチャートデータとして保存領域に保存する。
(もっと読む)
表面形状の測定方法および干渉計
【課題】表面形状の測定方法および干渉計において、波面形状の測定精度を向上することができるようにする。
【解決手段】同一の光束を測定光と参照光とに分割し、複数の干渉縞を形成して、それぞれの干渉縞画像を取得し、位相差を測定することにより、被測定面の形状を算出する表面形状の測定方法であって、位相差を目標位相増分Δφずつずらして(2n+1)枚の被測定画像を取得する被測定画像取得工程と、各被測定画像内の一定位置の位置強度データgj(j=−n,…,0,…,n)から、被測定光の位相θを算出して波面形状を算出する波面形状算出工程とを備え、位相θの計算式に含まれる係数Ai、Bi(i=1,…,n)は、位置強度データgjが、目標位相増分Δφからの位相偏差εを誤差として含む場合に、位相偏差εの(2n−2)次以下の成分によらず一定となるように設定する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラムおよび位置検出装置並びにそれを備えた移動体
【課題】ステレオ視により広角撮影した撮影画像を画像処理する際に、メモリ使用量および処理時間を低減することができる画像処理装置を提供すること。
【解決手段】画像処理装置3は、対象物Mを広角撮影可能で直線上に配置された2つのカメラCで撮像した画像により、対象物Mの位置を検出するために用いる情報として、対象物Mの画素位置を求めるために、2つのカメラCで撮像された画像を入力する画像入力手段10と、各カメラCから入力された画像を、その歪を補正した状態で、2つのカメラCの配置された直線と平行な軸線を持つ円筒面上に射影する画像射影手段30と、円筒面上に射影された画像において、対象物Mに対応する画素位置を検出する画素位置検出手段40とを備える。
(もっと読む)
ナノスケール変形を測定する方法、デバイス及びシステム
結晶試料の一部分(B)においてナノスケール変形を測定する方法であって、i)測定エリア(B)と、変形がなく、且つ測定エリアと同一平面上にあるものと仮定される基準エリアとを備える、ラメラ形状の試料を準備するステップと、ii)電子ビーム(Fin)を前記試料の一方の面に照射するステップと、iii)2つのビームの干渉が生じるように、測定エリア(B)によって回折した放射のビーム(F1B)と、基準エリア(A)によって回折した放射のビーム(F1A)とを重ね合わせるステップと、iv)干渉パターン(FI)の縞の、空間的周期性及び方位を測定するステップと、v)これから、基準エリアと測定エリアとの間の結晶パラメータ及び/又は方位の差を推定するステップとを含み、当該差は測定エリアのナノスケール変形の状態を示すことを特徴とする方法。 (もっと読む)
面位置検出装置、面位置検出方法、露光装置、及びデバイス製造方法
【課題】被検面の近傍に被検面以外の面が存在しても被検面の面位置情報を高精度に検出できること。
【解決手段】本発明にかかる面位置検出装置は、物体の所定の面(14a)の位置情報を検出する面位置検出装置であって、所定の面に対して傾斜した方向から光を投射する第1の光学系(51E)と、物体からの光を受光する第2の光学系(52E)と、第2の光学系(52E)からの光を受け取り、該光に基づいて、所定の面の当該所定の面に交差する方向における位置情報を検出する検出系(13)と、第1及び第2の光学系(51E, 52E)の少なくとも一方の光路中に設けられ、第2の光学系(52E)からの光のうち物体の所定の面以外の面を介した光中の異なる部分の間に位相差を付与する位相差付与系と、を備える。
(もっと読む)
形状測定装置
【課題】被検物の表面が完全拡散面であるか否かを判定し、その判定結果に応じて適切に収差補正処理を実行する。
【解決手段】シャッタ22は、瞳面における光束(被検物からの反射光)の透過を制限する。具体的には、瞳面の全域を光束が透過できる全開状態、瞳面の右半分の領域を光束が透過できるように右半開状態、または瞳面の左半分の領域を光束が透過できるように左半開状態に連続的に変化する。これにより、第1乃至3の画像が撮像される。収差補正部33は、補正テーブル記憶部34から適切な補正テーブルを読み出して収差補正処理を行う。本発明は、スリット光を用いた三角測量により被検物の3次元形状を測定する測定装置に採用することができる。
(もっと読む)
距離測定装置および距離測定方法
【課題】対象物の距離情報を短時間で測定できる、小型の距離測定装置を提供する。
【解決手段】本願発明に係る距離測定装置は、画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、メモリ3に保存された画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像処理部4は、再構成部4aと、輝度情報算出部4bと、距離情報算出部4cとからなる。
(もっと読む)
光学変位センサ
【課題】対象物までの距離の正確な制御を必要とせずに対象物の動きを測定する小型で低価格のセンサを提供する。
【解決手段】反復式光学構造が、照明されて移動する対象物により出射される反復光学信号の形成に用いられる。反復式光学構造は光源によって照明され、フリンジパターン(レーザドプラー風力測定法に似た)を形成し、そして/又は対象物が光源により照明され、反復式光学構造は、照明された対象物からの光を光センサの上へ導く。スペックルパターンは照明によって対象物の上に形成される。スペックルパターンは対象物の移動に伴って移動し、スペックルパターンの移動は、反復式光学構造上に対象物を結像させる必要なしに測定される。スペックルパターンは光学部材上に結合されないので、対象物と光学部材間の、距離と可能な距離変化はシステムの性能に実質的に影響しない。
(もっと読む)
深さ測定装置
【課題】高アスペクト比の凹部の深さを高精度に測定できる深さ測定装置及び深さ測定方法を提供する。
【解決手段】照明光源(1)から発生した照明ビームをリング状光ビーム生成装置(5,6)によりリング状光ビームに変換する。リング状光ビームは、対物レンズ(14)により、ベッセルビームに変換され、試料(15)に向けて照射される。試料に形成された凹部底面からの反射光は、結像レンズ(21)及びピンホール(22)を介して光検出装置(23)により受光される。試料を光軸方向に移動させながら試料の凹部からの反射光強度を検出し、反射光強度が最大となる光軸方向の位置を検出する。そして、凹部近傍の試料表面についても同様に、試料を光軸方向に移動させながら反射光強度を検出し、反射光強度が最大となる光軸方向の位置を検出する。これら検出された光軸方向の2 つの位置より、凹部の深さを決定する。
(もっと読む)
電子部品の高さ測定装置
【課題】吸着ノズル等で保持された電子部品を三次元測定する際、ライン光の正反射光を正確に撮像し、高さを高精度に測定できるようにする。
【解決手段】保持手段10により保持された電子部品Pに、ライン光発生手段19により斜め下方からライン光Lを照射した際の光切断線を撮像手段21により撮像し、得られた画像データに基づいて、該電子部品の高さを測定する電子部品の高さ測定装置において、前記電子部品の下面に平行に、前記ライン光発生手段を移動させてライン光を走査する投光ユニット26に、該下面に照射されたライン光の正反射光を、前記撮像手段の撮像部に反射させるミラー27が一体的に固定されている。
(もっと読む)
光学センサーデバイス
測定及び検査装置に用いる光学センサーデバイス(38)は、広帯域放射光源(50)、波長感応性受信機(52)及びビーム分岐手段(60)を有する白色光センサー(44)を含む光学センサーヘッド(40)と、測定ビームを測定されるべき対象物上に導くと共に、測定されるべき対象物から反射される反射ビームを検出する対物レンズ(46)とを備える。光学センサーデバイス(38)は、ビデオセンサー(80)を更に備え、ビデオセンサー(80)のビーム経路は、光学センサーヘッド(40)の白色光センサー(44)のビーム経路と同じ対物レンズ(46)を通過する。  (もっと読む)
(もっと読む)
チャックテーブルに保持された被加工物の高さ位置検出装置
【課題】透明の被加工物であってもチャックテーブルに保持された被加工物の上面高さ位置を確実に検出するための高さ位置検出装置を提供する。
【解決手段】レーザー光線発振手段6からのレーザー光線のスポット形状を環状に形成する環状スポット形成手段82と、該スポット形状が環状に形成されたレーザー光線を第1の経路に導くビームスプリッター83と、第1の経路に導かれたレーザー光線を集光して被加工物Wに照射する集光器7と、被加工物で反射したレーザー光線が前記ビームスプリッターによって分光される第2の経路に配設されたピンホールマスク84と、ピンホールマスクを通過したスポット形状が環状の反射光をライン状のスポット形状に変換する円錐ミラー85と、ライン状のスポット形状に変換された反射光の位置を検出する位置検出器86と、検出された反射光の位置に基いて被加工物の上面高さ位置を求める制御手段とを具備する。
(もっと読む)
搭載位置精度検査装置
【課題】収差を持たせたレンズを構成に含む光素子モジュールにおける、発光素子又は受光素子の搭載位置精度を良好に検査することが可能な搭載位置精度検査装置を提供する。
【解決手段】搭載位置精度検査装置21は、光素子モジュール22における発光素子23の搭載位置精度を検査するための装置であって、撮像デバイス24と、この撮像デバイス24からの信号が入力される画像処理装置25と、画像処理装置25で処理された結果を出力するための表示装置26とを備えている。また、搭載位置精度検査装置21は、光素子モジュール22の収差を持たせたレンズ27と撮像デバイス24との間に配置される一又は複数枚の収差補正用レンズ28を備えて構成されている。収差補正用レンズ28は、収差を持たせたレンズ27の収差を補正することができるようなものとなっている。
(もっと読む)
チャックテーブルに保持された被加工物の高さ位置検出装置
【課題】透明性を有する材料によって形成された被加工物であってもチャックテーブルに保持された被加工物の上面高さ位置を確実に検出する。
【解決手段】レーザー光線発振手段と、レーザー光線のスポット形状を環状に形成する環状スポット形成手段と、環状に形成されたレーザー光線を第1の経路に導く第1のビームスプリッターと、集光して被加工物に照射する集光器と、被加工物で反射したレーザー光線が第1のビームスプリッターによって分光される第2の経路に配設されたピンホールマスクと、ピンホールマスクを通過した反射光を第3の経路と第4の経路に分光する第2のビームスプリッターと、第3の経路に分光された反射光を受光する第1の受光素子と、第4の経路に分光された反射光の受光領域を規制する手段と第2の受光素子とを備え、第1の受光素子が受光した光量と第2の受光素子が受光した光量との比に基いて被加工物の上面高さ位置を求める。
(もっと読む)
薄膜コート層膜厚測定方法および膜厚測定装置
【課題】屈折率差の小さいベース樹脂上の光透過性膜を形成してなる被測定物における光透過性コート膜の膜厚を、非接触、非破壊で確実にかつ精度よく測定する膜厚測定方法、この方法を実施するための膜厚測定装置を提供すること。
【解決手段】所望波長領域のスペクトル光を放射する光源からの光を照明領域を制限した顕微鏡光学系を介した対物レンズにより集光し、集光光束をベース樹脂上の光透過性コート膜に垂直入射させ、前記光透過性コート膜表面とベース樹脂表面とにより反射して互いに干渉した反射光を、前記対物レンズを介して顕微鏡光学系に戻し、検出光伝送用ファイバにより分光手段に導いて分光し、分光した分光スペクトル強度から反射率を演算する際に、前記反射率を任意の大きさに拡大することにより前記反射率が極小及び極大となる波長を求め、前記極小と極大を与える各波長と、前記膜の屈折率とに基づき前記光透過性コート膜の膜厚を演算算出することを特徴とする薄膜コート層膜厚測定方法。
(もっと読む)
波面測定干渉計のフォーカス調整方法、波面測定干渉計および投影光学系の製造方法
【課題】 干渉計におけるフォーカス誤差を低減できて波面の微細なうねりまで高精度に測定する。
【解決手段】 被測定物の干渉計結像光学系による共役位置に干渉計の画像検出器の位置を調整するために、干渉計のフォーカス制御手段を利用して複数の測定面で波面測定を行う。測定した波面データのうち空間周波数が高いうねり成分のみ抽出して、さらに空間周波数毎にパワースペクトル密度で表す。それらを特定の帯域内で積分し、その積分値が最小となる測定位置を算出する。
(もっと読む)
201 - 220 / 439
[ Back to top ]