
Fターム[2F065MM23]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 受光系による走査 (768) | 受光器の移動 (283)
Fターム[2F065MM23]の下位に属するFターム
Fターム[2F065MM23]に分類される特許
41 - 60 / 67
大面積不変形光斑撮像装置及びその方法
【課題】大面積不変形光斑撮像装置及びその方法の提供。
【解決手段】該大面積不変形光斑撮像装置は光発射器、光制限モジュール及びセンサを包含し、該光制限モジュールは該センサの前に取付られ、該光制限モジュールは複数の光制限素子を包含し、光制限素子は一次元或いは二次元アレイに配列され、該光発射器が光源を物体表面に発射し、散乱光を発生し、該光制限モジュールがこの散乱光を制限し、並びに回折光を発生し、該回折光が相互に干渉して複数のアレイ不変形光斑画像を発生し、且つ該センサ上に成像し、最後にアレイ光斑画像を画像リフォームして大面積且つ不変形の光斑図を得る。該光斑図は大面積不変形の光斑画像であり、且つ該光斑図は物体表面の三次元変化の特徴を記録するため、該大面積不変形光斑撮像装置はコンピュータマウス、手指ナビゲータ、スマートカード、三次元指紋識別装置、工作機械或いは機械アーム精密位置決めシステム等に応用可能である。
(もっと読む)
表面形状プロファイルを測定するための方法および装置
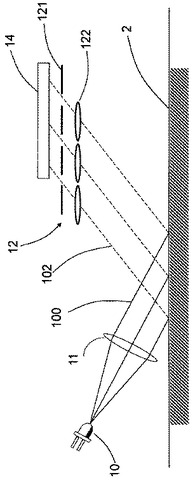
シート材料の表面の形状プロファイルを測定するための装置は、前記シート材料の表面に向けて光ビームを提供する光源と、前記光ビームが前記表面で検出される際に前記表面の複数の位置に入射して、前記複数の位置のそれぞれにおいて反射光ビームを生じるように前記光源を前記シート材料の表面上を移動させるために前記光源に連結する線形の移動ステージと、前記複数の位置のそれぞれにおいて生じた反射光ビームを選択的に受信するために所定の位置に配置される複数の光受信器と、前記光源と前記複数の位置のそれぞれで生じた反射光ビームを受信する前記複数の光受信器から選択される1つの光受信器との位置差に関する情報を受信するように構成されるデータ収集装置と、前記位置差情報を前記シート材料の表面の形状プロファイルと関連付けるように構成されるデータ解析装置とを備えている。  (もっと読む)
(もっと読む)
物体形状のマルチフレーム表面測定のためのシステム及び方法
有形物の形状のマルチフレーム表面測定のためのシステム及び方法を提供する。このシステム及び方法は、測定される物体の表面の一部の複数の画像を取り込むステップと、取り込んだ画像を共通基準系において一緒にマージするステップとを含む。3Dスキャナを使用して、様々な視点から複数の画像を取り込み、続いて、共通座標系において画像をマージして、マージした画像を一緒に位置調整することによって、複雑な形の物体の形状及びテクスチャのうちの一方又は双方を測定することが可能である。位置調整は、物体の表面の一部と、知られている特性(例えば形状及びテクスチャのうちの一方又は双方)を有する基準物体の一部との両方の画像を取り込むことによって達成される。これによって、物体スキャナの位置及び向きを基準物体の座標系で決定することが可能となる。  (もっと読む)
(もっと読む)
計測装置

【課題】被検物の立体形状を正確に計測することができる計測装置を提供すること。
【解決手段】被検物Mを支持して、該被検物を、互いに交差する2つの軸(θ軸、φ軸)の周りでそれぞれ変位させるステージ部材(θステージ20、φステージ25)と、前記被検物の変位によらず該被検物との相対位置関係が変化しない位置基準部材(レジストレーションマーク24a,24c,29)と、前記被検物と前記位置基準部材の形状情報をそれぞれ採取する計測部(形状センサ30)と、前記計測部を前記2つの軸を含む面に対して平行に移動させる移動部(X軸ステージ35)と、前記被検物の形状情報と前記位置基準部材の形状情報とに基づいて前記被検物の形状データを求める処理部(形状測定回路40、形状合成回路42)と、を備える。
(もっと読む)
非接触プローブ
非接触測定装置および方法。測定される対象物体の画像を取り込むための少なくとも1つの撮像デバイスを備える、座標位置決め装置上に装着するためのプローブが提供される。第1の透視位置からプローブによって得られる対象物体の少なくとも1つの第1の画像および第2の透視位置からプローブによって得られる対象物体の少なくとも1つの第2の画像を解析して、測定される対象物体上の少なくとも1つのターゲット特徴を識別するように構成された画像解析装置も提供される。前記画像解析装置は、光学的パターンが投影される対象物体の、プローブによって得られる画像の解析結果を用いて、対象物体の表面に関する凹凸形状データを取得するようにさらに構成される。  (もっと読む)
(もっと読む)
構造光を使用した土工量算出装置及び方法
掘削機のバケットにより掘削された土工量を3D地盤形状イメージを通じて算出することができ、作業が完了した地域に対する最終土工量を正確に算出することができ、リアルタイムな3次元地盤形状イメージにより最適の土工作業計画システムを開発及び活用することができる、構造光を使用した土工量算出装置及び方法を提供する。
この技術的構成は、掘削機アームの各折曲点に具備されて掘削機アームの位置及び屈折角を感知して出力する制御センサー部と、該制御センサー部の出力により掘削機アームの一側端部に具備されたバケットの作業領域の映像を撮影するように制御信号を出力し、撮影された映像を3次元イメージに変換して土工量を算出するマイクロコントローラーと、前記制御信号により前記作業領域を照査するように光源がオンになる照明モジュールと、前記制御信号により前記作業領域を撮影する構造光モジュールとを含む。  (もっと読む)
(もっと読む)
3次元距離測定装置及び脚車輪型ロボット
【課題】測距センサの駆動機構に阻害されずに走査範囲を走査することが可能な3次元距離測定装置及び当該装置を備えた脚車輪型ロボットを提供する。
【解決手段】3次元距離測定装置200を、2次元距離測定装置112と、モータ116と、エンコーダ118と、プーリ120a及び120bと、ベルト121とを含んだ構成とし、モータ116の第1の回転軸を、プーリ120aの回転軸となるように当該プーリ120aと係合し、モータ116の回転駆動力で、プーリ120aを回転駆動する。プーリ120a及びプーリ120bは、その軸心A及びBの位置が水平方向に所定の距離を開けるように配設し、プーリ120aの回転駆動力は、ベルト121を介してプーリ120bに伝達されるようにした。また、プーリ120bと、2次元距離測定装置112を回転駆動する第2の回転軸とは、当該第2の回転軸がプーリ120bの回転に連動して回転するように係合した。
(もっと読む)
リードフレームの検査方法及びその装置
【課題】保護テープが貼られているリードフレームの検査方法および検査装置を提供すること。
【解決手段】リードフレームの保護テープが貼られているほうの面を撮像し、前記撮像位置に対して前記リードフレームを挟んで反対側の面から前記リードフレームに照射光を照射する透過光学系により、かつ、前記保護テープの透過率が高い波長域または低い波長域のいずれかを選択して検査する波長域選択手段を有する透過光学系により、前記リードフレームに前記照射光を照射し前記リードフレームを撮像する撮像段階と、前記撮像段階で得られた画像データに対して不良箇所の抽出処理を行なう画像データ処理段階とを備えるリードフレームの検査方法。
(もっと読む)
測定プローブおよびその制御方法
【課題】正確な構造化光を用いる測定機能に加え、およその距離測定機能を実行するマルチレンジの非接触プローブを提供する。
【解決手段】プローブは、限られた数の有線接続を提供するプローブヘッドシステムとともに用いられる進歩した測定能力及び機能を可能にするプローブ制御インタフェースに適合する。プローブのレーザビームは、第1の期間中は構造化光を用いる測定機能を提供するために第1の光路に沿って誘導され、第2の期間中は距離測定機能を提供するために第2の光路に沿って誘導される。光学的特性のタイプの異なる少なくとも第1の部分及び第2の部分を有する単一のビーム変調要素が駆動されて、レーザビームを第1の部分から第1の光路に沿って出力し、次いでレーザビームを第2の部分から第2の光路に沿って出力する。
(もっと読む)
レーザ光学系の検査装置
【課題】レーザ光学系に付着した異物を、安価にかつ容易に検査できるレーザ光学系の検査装置を提供する。
【解決手段】レーザ光学系としての走査光学ユニット100の走査するレーザビームLBの光エネルギを測定可能なフォトダイオードPD、走査光学ユニット100の走査するレーザビームLBにフォトダイオードPDを追従させる移動機構80,90と、フォトダイオードPDからの信号に基づいて異物の有無を検出する検出手段としての信号処理回路30及び演算装置10とを有する。
(もっと読む)
受信電磁放射線から物体の3次元情報を抽出するシステム、装置および方法
物体のホログラムを生成する装置および方法は、物体から光のような受信電磁放射線を受けるように構成されている電磁放射組立体を含む。電磁放射組立体は、受信電磁放射線を回折させ、回折された電磁放射線を透過させるためさらに構成されている。像捕捉組立体は、回折された電磁放射線の像を捕捉し、捕捉された像から物体のホログラムを生成するように構成されている。 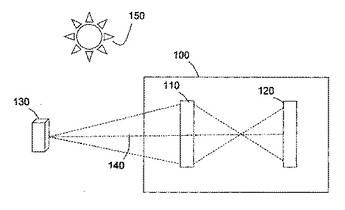 (もっと読む)
(もっと読む)
逐次多点式真直度測定法および測定装置
【課題】
大型液晶用マスク基板、大型機械加工面、大型定盤基準面などの長尺での真直度測定では、超精密駆動基準軸や超精密水準器、レーザー反射式コリメータなどが使用されている。
特に、大型マスク基板での1mを越す長尺測定では超精密駆動基準軸は高価格であり、水準器やコリメータでは被測定物との接触が問題となる。そこで、低価格で非接触式の高精度測定システムが求められている。
【解決手段】
本発明は、従来の遂次3点測定法の欠点である多数点測定での累積誤差の増大、測定ピッチの制限を改良した。遂次3点測定での累積誤差は測定点数の2乗に比例している。本発明では長尺の全長を数ブロックに分割し、ブロック間を3個のセンサー21,22,23による従来の3点法で計測し、ブロック内は4個目のセンサー24で同時信号処理にて測定し、累積誤差の大幅な軽減化と測定ピッチの任意化が可能となった。
(もっと読む)
立体物イメージスキャナ
【課題】 立体物イメージスキャナにおいて大きい立体物の全体像を良好な画質で取得する。
【解決手段】 スキャニングユニット24は、リニアイメージセンサとテレセントリック結像系を内蔵し、直線状のターゲット平面領域48を撮像する。直線状の2本の光源34A、34Bがスキャニングユニット24の左右両側に配置され、ターゲット平面領域48を照明する。スキャニングユニット24と光源34A、34Bは一緒に三次元的(X、Y、Z方向)に移動し、それにより、ターゲット平面領域48が被写体空間15を三次元的にくまなくスキャンする。一方の光源34Aのみを点灯して三次元スキャンを行い、得られた画像データ中のピントの合った画素を繋いで合焦点画像を形成し、次に、他方の光源34Bのみを点灯して同様に合焦点画像を形成し、そして、両合焦点画像を加算平均する。
(もっと読む)
直径計測方法又は直径計測装置
【課題】計測手順を簡略化して被計測体の直径計測を短時間に且つ手軽に行うことを可能とする
【解決手段】先ず、携帯可能な計測ヘッド部11に配備された撮像装置10によって丸棒状の被計測体Wを撮像し、該撮像によって得られた画像上に被計測体Wの軸心を介して径方向に対向する一対の境界を収める。次に、該画像に基づいて撮像装置10の位置を調整して被計測体Wの軸心に撮像装置10の光軸を直交させる。そして、被計測体Wの軸心に撮像装置10の光軸を直交させた状態で撮像装置10のレンズ中心から被計測体の表面までの距離をレーザ距離測定器16距離によって計測する。その後、該計測によって得られた計測値Lと、該計測値Lを得たときの画像に示される前記一対の境界の位置とに基づいて被計測体Wの直径Dを演算する。
(もっと読む)
ボイラ管の変形管理方法及びその装置
【課題】多数のボイラ管の変形量の計測作業を容易化するとともに計測作業時間を短縮し、計測作業能率を向上できるボイラ管の変形管理手段を提供する。
【解決手段】複数のボイラ管の長手方向に沿ってある間隔にて設けられた複数の管板などで支持してなるボイラ管群におけるボイラ管の変形量を計測して、該変形量の計測値に基づき該ボイラ管の寿命及び交換の要否を検知するボイラ管の変形管理手段であって、ボイラ管群のある範囲毎に一定長さの基準棒を固着するとともに、ボイラ管の長手方向に沿った複数箇所の表面にボイラ管毎に識別可能な特異物を固定し、カメラによって基準棒及び特異物を撮像して撮像データに基づき各ボイラ管の変形量を算出することを特徴とする。
(もっと読む)
形態検査方法及びシステム
【課題】毛髪のような対象物の形態的特徴の判定を迅速かつ精度良く行うことを可能とする。
【解決手段】カメラ10によって主走査方向及び副走査方向の走査により基準対象物3及び被検対象物4−1〜4−nを撮像して得られる画像信号を画像処理装置11で処理して各対象物の各点の明度を主走査方向及び副走査方向に直交する方向にとった3次元画像を表す画像信号を生成し、判定装置12において3次元画像中の各対象物に対応する画像の幅、長さ及び明度変化を含む形態特徴量を用いて基準対象物と被検対象物との間の相関を判定する。
(もっと読む)
物体の運動を検出するシステム
本発明は、物体(2)の運動を検出するシステム(1)に係る。当該システムは、物体に対して結合される第1の細長い格子ストリップ(4)、及び、第1の細長い格子ストリップに交差する、別個の実質的に固定された第2の細長い格子ストリップ(5)を有する。当該システムは更に、物体の運動を検出するよう、第1及び第2の細長い格子ストリップにおいて回折される1つ又はそれより多い光ビームを受けるよう配置される光学検出手段(6)を有する。本発明は更に、物体(2)の運動を検出する方法、及び物体加工又は検査システムに係る。  (もっと読む)
(もっと読む)
距離測定装置及び距離測定方法
【課題】監視対象物の特性や周りの環境に影響されずに、監視対象物までの距離を測定することにある。
【解決手段】所定の場所に設置された監視カメラ1と、旋回操作及びズーム操作情報を入力する操作端末6と、操作端末からの操作情報に基づいて監視カメラ1を操作し、監視カメラ1で撮影された監視対象物10を含む画像を取り込んで分配し、かつカメラ設置場所に関する情報を生成する制御処理部7と、この分配された撮影画像の中の監視対象物の位置とカメラ設置高さと前記操作情報とに基づき、監視対象物10までの距離を算出し制御処理部7に送出する画像処理演算部8と、前記分配された監視対象物10を含んだ画像を表示するとともに、制御処理部7から画像処理結果の距離情報及びカメラ設置場所に関する情報を受け取って表示するモニタ装置9とを設けた距離測定装置である。
(もっと読む)
導光板外観検査装置
【課題】 液晶表示装置(LCD)のバックライト照明の導光板の画像処理検査装置において、検査時間内でワークである導光板の交換するステージを2つ持ち、交互に検査とワーク交換する構造とし、ワーク往復移動の撮像を最良にするためにカメラとワークとの角度を自動で変更する構造とする。
【解決手段】 2つの、ワークである導光板の積載ステージは、高さの変更できるZ軸モータとボールネジをX軸リニアモータ上の片側に持ち、ステージ下にカムフロアを持ち、撮像位置に2本のレールを持ち、ワーク交換位置では交換後に上位置から下位置に下降し、撮像手前位置に移動して上昇しレールに乗り、往復移動しながら撮像後、ワーク交換位置にそのまま移動し、2つのステージは干渉しないで、検査処理数を増大させる。2種のカメラがその構造体ごと一部域旋回移動し、ワークとの撮像角度を変更し最適な撮像データを撮り込み画像処理で良否判定の外観検査をする。
(もっと読む)
立体形状検出装置及び立体形状検出方法
【課題】 エッジ画像における基準点の対応付けを簡単な処理で正確に行なうことでリアルタイム処理も可能な立体形状検出装置及び立体形状検出方法を提供する。
【解決手段】 対象物体20を撮影しその立体形状を検出するために、カメラ部10により少なくとも2つの所定の撮影位置から対象物体20を撮影する。カメラ部10は、レンズ1と撮像素子2とを有する。視軸微動装置4により、撮影位置間を結ぶ方向にカメラ部10の光軸を微小に移動させる。このときに撮影された複数枚の画像に、画像処理部3でエッジ強調等の画像処理を施し、対象物体20のエッジが抽出されたエッジ画像を生成し、そして2つの撮影位置からのエッジ画像を比較して、対象物体20の対応するエッジを検出する。
(もっと読む)
41 - 60 / 67
[ Back to top ]