
Fターム[2F065MM23]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 受光系による走査 (768) | 受光器の移動 (283)
Fターム[2F065MM23]の下位に属するFターム
Fターム[2F065MM23]に分類される特許
21 - 40 / 67
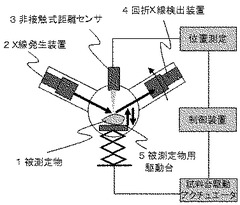
高精度電磁波回折測定装置
【課題】
X線など電磁波の回折法によるひずみ測定において、測定中に被測定物の移動や変形により電磁波照射位置が変化した場合に、照射位置のずれを補正し、回折によるひずみ測定を精度良くする装置を提供する。
【解決手段】
試験片の表面の高さを非接触式の距離センサで計測し、試験片位置の変化に応じて同じ位置になるようにステージを移動することで、測定中に試験片に応力を印加するなどしても電磁波の照射位置が同じになるようにする。電磁波照射中に試験片の表面高さを測定する機構と、試験片高さ位置を最初と同じ位置に移動する機構、回折電磁波の回折角を測定する機構を備え、電磁波照射位置を試験片表面の同一位置となるように補正できることから、表面位置変化による測定誤差を回避し、正確な回折角測定が可能となる。
(もっと読む)
移動環境認識装置及び方法

【課題】移動体の移動対象を簡易に測定する。
【解決手段】円錐検出光DETと測定対象の表面S2との交点TRからの反射光に基づいてセンサ原点Oから測定対象S2までの距離を測定し、当該測定結果から得た交円TRの特徴量によって測定対象表面S2の形状を求めるようにしたことにより、円錐検出光DETの立体的な構成を利用して測定対象S2の形状を簡便かつ確実に測定することができる。
(もっと読む)
2次元位相データの位相つなぎ方法および干渉測定装置
【課題】ノイズ耐性が大きく、比較的短時間で位相つなぎを実行できる2次元位相データの位相つなぎ方法および、これを用いた干渉測定装置を提供する。
【解決手段】本発明は2次元の位相分布を表す位相データに含まれる位相ジャンプを補正するための位相つなぎ方法であって、ある測定点および該測定点の周囲にある複数の測定点を用いて局所的な近似面を生成する手法を用いて、各測定点に関連した複数の近似面を構築するステップ(s2〜s4)と、隣接する近似面の間に位相ジャンプがある場合、一方の近似面に対して位相2πを加算または減算することによって近似面の位相つなぎを行い、参照近似面を生成するステップ(s5)と、参照近似面と該参照近似面の生成に使用した測定点との間に位相ジャンプがある場合、この測定点に対して位相2πを加算または減算することによって測定点の位相つなぎを行うステップ(s6〜s9)等を含む。
(もっと読む)
ロボット追従式画像検査装置、ロボット追従式画像検査方法及びロボット追従式画像検査に用いるコンピュータプログラム
【課題】設置場所における外部からの光の影響を受け難く、外部からの光の影響を避けるための調整を必要としない、画像検査装置、画像検査方法及び画像検査に用いるコンピュータプログラムを提供する。
【解決手段】画像検査装置は、ガラス140上のウレタン塗布領域に塗布されたウレタン144に赤外線を照射する赤外線照射装置120と、ウレタン144を撮影する赤外線撮影装置116とが取り付けられたロボットハンド112を備え、ロボットハンド112はウレタン塗布領域に沿って設定された経路上を移動することができる構成とされている。そして、ロボットハンド112が前記径路上を移動する際に、赤外線照射装置120によって赤外線が照射されたウレタン144を、赤外線撮影装置116により連続撮影して画像を取得し、赤外線撮影装置116により取得した画像によりウレタン144の塗布状態を検査する。
(もっと読む)
ロボットシステムおよびロボットシステムの制御方法
【課題】ワークが撮像されたボケ画像からワークの位置を精度良く検出するロボットシステムを提供する。
【解決手段】ワークWに対して作業を実施するロボット10と、前記ワークWを載置するとともに、蛍光体マーカー74を備えたステージ72と、前記ワークWと前記蛍光体マーカー74とを所定の露光時間で撮像するカメラ20と、前記カメラ20の露光時間より短い周期で前記蛍光体マーカー74を点滅発光させるマーカー制御部45と、を備え、前記カメラ20により撮像されたボケ画像から前記蛍光体マーカー74の軌跡画像100を抽出して、前記軌跡画像100から点拡散関数を算出する点拡散関数算出部35と、算出した前記点拡散関数を用いて、前記ボケ画像を画像変換し前記ボケ画像からボケていない元画像を生成する画像生成部37と、前記元画像から前記ワークWの位置を算出する位置算出部39と、を有するロボットシステム5。
(もっと読む)
三次元形状測定システム及び三次元形状測定方法
【課題】被測定物の三次元形状の外観を効率良く把握できる三次元形状測定システム及び三次元形状測定方法を提供する。
【解決手段】色が規則的に変化する光パルスをパルス光源56及びチャープ導入装置60により生成し、生成された前記光パルスをワーク30に照射し、該ワーク30から反射された前記光パルスの反射光像をシャッタユニット42により取得し、取得された前記反射光像の二次元情報及び色情報を用いてワーク30の三次元情報をカラー二次元検出器88により取得する。また、カラー二次元検出器88により取得されたワーク30の二次元情報に基づいて所定の箇所を選択し、該所定の箇所における三次元情報を取得する。
(もっと読む)
溶接H形鋼の製造方法及び装置
【課題】高精度な直角度でH形鋼を製造する。
【解決手段】搬送されてくる溶接H形鋼1の上下のフランジ1fu、1fdの外面及びウエブ1wの一方の面と対向するように内壁面が配置された側面視コ字状の測定器本体11aと、この測定器本体11aの前記内壁面に、前記各面に対向すべく少なくとも2個配置されたレーザ距離計3a〜3fと、これらレーザ距離計3a〜3fにより測定した溶接H形鋼1の同一断面の測定値に基づき、直角度を求める演算器11cを備えた装置を用い、溶接H形鋼1を製品長さに切断する切断機12の下流側で、拘束されずに搬送されてくる溶接H形鋼1の上下のフランジ1fu、1fdの外面及びウエブ1wの一方の面のそれぞれの傾きを測定し、その傾きから直角度を算出する。算出した結果をフィードバックして溶接接合されたH形鋼を矯正する。
【効果】高精度に測定した直角度に基づいて矯正することで、直角度が良好な製品の製造が可能になる。
(もっと読む)
三次元形状測定システム
【課題】被測定物の測定対象が広範囲である場合における測定の所要時間を短縮できるとともに、製造コストを低減することを可能とする三次元形状測定システムを提供する。
【解決手段】パルス光を生成するパルス光源36と、生成されたパルス光を分配する光分配器64と、分配された各パルス光に基づいて、色が規則的に経時変化するチャープ光パルスを生成する複数のチャープ導入装置84と、生成された各チャープ光パルスをワーク32の各照射領域94に照射し、ワーク32で反射された各チャープ光パルスの各反射光像を取得する複数の反射光像取得部114と、取得された前記各反射光像の二次元情報及び色情報を用いて、ワーク32の三次元情報を取得するカラー二次元検出器106とを有する。
(もっと読む)
基板保持装置、欠陥検査装置及び欠陥修正装置
【課題】第8世代や第10世代のガラス基板に対する欠陥検査や欠陥修正に対応できる基板保持装置を実現する。
【解決手段】本発明による基板保持装置は、固定端とテンション端との間に張架されると共に第1の方向に沿って延在する支持ワイヤ(7〜10)を含む複数のワイヤ支持機構(3〜6)と、ワイヤ支持機構の各支持ワイヤに対して第1の方向に沿って移動可能に連結されたステージ(30)と、ステージを第1の方向に案内するガイド手段(44)と、ステージを第1の方向に沿って移動させる駆動装置(51,53)とを具える。ワイヤ支持機構の各支持ワイヤは、同一の平面内において互いに平行に張架され、複数の支持ワイヤ上に基板が載置された際、当該ステージは、支持ワイヤ上に載置された基板の裏面と直接対向しながら第1の方向に移動する。ステージは、基板の裏面と直接対向しながら第1の方向に移動するので、支持ワイヤによる影響を受けることなく各種処理を行うことができる。
(もっと読む)
位置計測システム及び位置計測方法
【課題】対象物のステレオ視によって対象物の位置を計測するに際し、量子化誤差を軽減することができる位置計測システム及び位置計測方法を提供する。
【解決手段】位置計測システム1では、対象物Tのステレオ視において2台のカメラの視線領域が重なる重複領域に対象物Tの真値(真の座標)が存在することに鑑み、視線領域SR1,SR2が、カメラ21,22の移動によって、隣り合う一方の視線領域から他方の視線領域に移動したことを検出したときには、視線領域SR1と視線領域SR2とが重なる重複領域DR1のうち、一方の視線領域と他方の視線領域との境界領域に対象物Tが位置すると判断し、対象物Tの位置を算出する。これにより、重複領域DR1から境界領域へと、真値が存在する領域が狭められる。
(もっと読む)
三次元計測用画像撮影装置及びその方法
【課題】撮影の進捗状況を把握でき、撮影を過不足なく効率的に行なえる三次元計測用画像撮影装置を提供する。
【解決手段】本発明による三次元計測用画像撮影装置1は、測定対象物2を単カメラにより撮影する装置で、撮影画像を取得する撮影部3、撮影画像から特徴点を抽出する特徴点抽出部61、撮影画像を3以上の特徴点で囲まれた撮影領域に区分する撮影領域区分部81、区分された撮影画像を記憶する撮影領域画像記憶部54、特徴点の三次元座標を求める三次元位置測定部7、測定対象物2の撮影範囲を三次元空間に表現する撮影範囲画像に各特徴点を書き込み、これらの特徴点を結線して撮影領域に区画する撮影範囲画像形成部85、撮影不足領域の有無を判定する撮影不足領域判定部86、撮影範囲画像を表示する表示部4を備える。
(もっと読む)
物体認識方法
【課題】精度良くワークの位置を検出する方法を提供する。
【解決手段】第1パターンが形成された容器上に第1パターンの内側を目標にして四角板を配置するワーク配置工程と、第1パターンと四角板とを撮像して画像データ47を取得する撮像工程と、画像データ47における第1パターン像49と四角板像48との相対位置を分析して四角板の姿勢を認識するワーク認識工程と、を有する。そして、第1パターンは四角板の外形形状を囲むパターンに形成されている。
(もっと読む)
人体温度測定装置およびその測定方法
【課題】人の位置が定まらない環境下において、比較的安価に人の温度を非接触で測定することができる。
【解決手段】人体温度測定装置1は、撮影部11、画像解析部21、赤外線量測定部31、可動部41、方向制御手段51、距離測定部61、および、温度補正手段71を有する。画像解析部21は、撮影部11により撮影された画像を解析し、その画像に写った人の顔を認識する。赤外線量測定部31は、所定の測定範囲からの赤外線量を測定する。可動部41および方向制御手段51は、赤外線量測定部31および距離測定部61が人の顔を向くように、その方向を変化させる。距離測定部61は、赤外線量測定部31と人の顔との距離を測定する。温度補正手段71は、赤外線量測定部31が人の顔に向かって測定した赤外線量を距離測定部61が測定した距離に基づいて補正して、人の顔の温度を取得する。
(もっと読む)
歯科用手持ちカメラおよび光学的な3次元測定方法
本発明は、有色の測定深度(15.1,15.2,15.3,15.4)をもたらす有色の物体(2)、多色の光源(3)、およびスペクトル分析のための色センサ(4)を備える光学的3次元測定のための歯科用手持ちカメラ(1)に関する。さらに歯科用手持ちカメラ(1)は調節可能なスキャンユニット(20)を備え、これにより有色の測定深度(15.1,15.2,15.3,15.4)が段階的に転移可能であり、これによりスキャンユニットの第1の位置(20)における第1の有色の測定深度(15.1)に、スキャンユニットの第2の位置(20’)における少なくとも第2の有色の測定深度(15.2,15.3,15.4)が連結するか、または第1の有色の測定深度(15.1)が部分的に重なり、このようにして少なくとも2つの測定深度(15.1,15.2,15.3,15.4)から増大された測定深度全体(16)が形成される。さらに本発明は、本発明による歯科用手持ちカメラ(1)を用いた光学的3次元測定方法に関する。 (もっと読む)
位置計測システム
【課題】 特定のカメラの撮影範囲外にある対象物であっても別のカメラを介することによりその対象物の位置を計測することができる位置計測システムを提供する。
【解決手段】 位置計測システムは、位置関係の分かっている3つ以上の基本標識を有する標識セット1と、標識セット1を撮像するカメラ10と、カメラ10に取り付けられる位置関係の分かっている4つ以上の基本標識を有する標識セット2と、標識セット2を撮像するカメラ20と、カメラ10で撮像した標識セット1の画像から標識セット1の位置を演算し、カメラ20で撮像した標識セット2の画像からカメラ10の位置と角度を演算し、このカメラ10の位置と角度に基づいて、カメラ10のカメラ座標15を基準とした標識セット1の位置をカメラ20のカメラ座標25を基準とした位置として演算する演算部30とを備える。
(もっと読む)
表面性状測定装置
【課題】反射像を撮影して表面性状を測定する表面性状測定装置の光源部の入射角およびデジタルカメラ等の固定撮像素子の受光角を多様に変更でき、且つその調整を無段階に簡単に行える表面性状測定装置を提供する。
【解決手段】ベース1に半円状の摺動ガイド13を固定し、摺動ガイド13上に摺動子33,43を摺動自在に取り付けて、その一方にデジタルカメラ31を固定し、他方に光源部41を固定する。そして、それら摺動子33,43にそれぞれ円弧ラック51,61を固定し、調節ツマミ81の操作により歯車52,62および円弧ラック51,61を介して摺動子33,43を移動させ、光源部41とデジタルカメラ31を互いに反対方向に同じ角度だけ回転させることができるようにする。
(もっと読む)
3次元測定装置
【課題】変位計と同軸に撮像手段を配置しなくとも、オペレータが変位計による測定位置を理解できるようにする。
【解決手段】CCDカメラ34により撮像されたワークの画像P1が、CRT上に表示される。ワークの画像P1上には、レーザプローブ35による測定点の位置を示す測定位置マークM1が表示される。レーザプローブ35の測定への切り替えが行なわれると、マークM1がCRTの画面中央になるように表示画面が変化する。マークM1の表示位置は、CCDカメラ34とレーザプローブ35との間の位置校正データと、XYZ軸エンコーダの検出出力とに基づいて変化する。
(もっと読む)
溶接品質検査方法および装置
【課題】 溶接金属内あるいは裏ビードなどにおける欠陥要素を反映した溶接品質評価を行うことができる溶接品質検査方法および装置、特にパイプ突合せ継手のアーク溶接部における溶接品質評価を溶接施工時に行うことができる溶接品質検査方法および装置を提供する。
【解決手段】 表面形状計測器20を用いて溶接前の開先表面形状と溶接後のビード表面形状を測定して両者の形状差から溶接部の溶着金属量を算定し、溶接ワイヤ送給量測定器30により求めた溶接ワイヤ供給量に基づいて溶接金属供給量を推定し、溶着金属量の溶接金属供給量に対する比率を算定して、この比率を溶接品質の指標とする溶着指数として表示器に表示する。
(もっと読む)
ミシン
【課題】撮像手段がミシンに設けられており、撮像手段で撮影された画像から正確な位置情報を取得することができるミシンを提供する。
【解決手段】ミシンに対して、イメージセンサのパラメータ算出の指示がなされると、イメージセンサにより画像が撮像され、RAMの撮像画像記憶エリアに記憶される(S1)。撮像画像から直線が抽出され、抽出された直線の交点の座標が算出され、交点のうち、特徴点に該当する点の座標が特徴点番号に対応させて特徴点二次元座標記憶エリアに記憶される(S2)。算出された二次元座標を特徴点番号に対応させることにより、特徴点三次元座標記憶エリアにおいて特徴点番号に対応して記憶されている三次元座標とも対応が取れる。次いで、周知の方法でパラメータが算出され、内部パラメータ記憶エリア及び外部パラメータ記憶エリアに記憶される(S3)。
(もっと読む)
ミシン
【課題】撮像手段の設置状態が変化しても、撮像手段で撮像された画像から正確な位置情報を取得することができるミシンを提供する。
【解決手段】ミシンに対して、イメージセンサのパラメータ補正指示がされると、イメージセンサで画像を撮像する(S1)。撮像画像から直線を抽出し、抽出した直線の交点の座標を算出する。交点のうち、特徴点に該当する点の座標を特徴点番号に対応させる(S2)。算出した二次元座標を特徴点番号に対応させ、特徴点三次元座標記憶エリアに特徴点番号に対応して記憶されている三次元座標と対応を取る。次いで、周知の方法でパラメータを算出する(S3)。次いで、S3で算出された比較パラメータと、使用中の内部パラメータとが夫々比較され、一致しないパラメータがあれば(S4:NO)、比較パラメータを新たなパラメータとする(S5)。
(もっと読む)
21 - 40 / 67
[ Back to top ]