
Fターム[2F065QQ30]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の特定位置の検出 (2,005) | ゼロクロス点;基準値との一致点 (28)
Fターム[2F065QQ30]に分類される特許
1 - 20 / 28
情報処理装置、情報処理装置の制御方法、およびプログラム
三次元計測装置、三次元計測装置の制御方法、およびプログラム
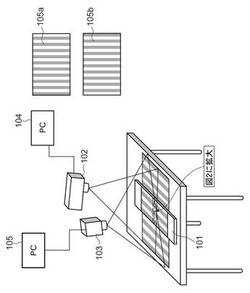
【課題】パターンの1周期を撮像素子の少ない画素数でサンプリングした上で交点間隔の誤差を低減し、三次元計測の精度を向上する。
【解決手段】明部と暗部とが交互に配置された第1の明暗パターン光が投影された対象物を撮像して取得される第1の画像の階調値と、当該第1の明暗パターン光の位相をずらした第2の明暗パターン光が投影された当該対象物を撮像して取得される第2の画像の階調値とを用いて、当該第1の明暗パターン光と当該第2の明暗パターン光との複数の交点位置を検出する検出部と、検出部により検出された複数の交点位置に含まれる第1の交点位置と当該第1の交点位置と隣接する第2の交点位置とに基づいて、第3の位置を算出して、当該第3の位置の間隔に基づいて対象物の三次元位置を計測する計測部と、を備える。
(もっと読む)
マルチカメラのキャリブレーション用全周フィールド

【課題】マルチカメラをキャリブレーションする場合の被写体であって、カメラごとに被写体を移動させることなく、高精度なマルチカメラのキャリブレーションが可能な全周フィールドおよびその撮影方法を提供する。
【解決手段】全周フィールドは、基準方向に光軸を有する基準カメラ11と、基準方向とは異なる方向に光軸を有する他のカメラ12とを有するマルチカメラ10aで撮影し、キャリブレーションするための全周フィールド1であって、マルチカメラ10aの内部パラメータまたは外部パラメータを測定するために撮影される、全周フィールド1内に配置された、三次元座標が既知の複数のターゲットを備える。基準方向から所定の角度範囲においては、ターゲットが第1の密度で配置され、基準方向から所定の角度範囲の範囲外においては、ターゲットが第1の密度よりも高い第2の密度で配置される。また、全周フィールド1の法線は、少なくとも2方向を有する。
(もっと読む)
三次元計測装置及び三次元計測方法
【課題】交点間隔を正しく求め、精度良く三次元計測を行える三次元計測装置及び方法を提供する。
【解決手段】明部と暗部を交互に配置する第1のパターン光と、前記第1のパターン光の位相をずらした第2のパターン光とを測定対象物に投影する投影手段と、第1または第2のパターン光が投影された測定対象物を撮像する撮像手段とを有する三次元計測装置は、撮像手段により得られた、第1及び第2のパターン光の画像データの階調値から、-階調値の交点位置を算出して三次元位置を計算する。ここで、パターン光の明部と暗部の繰り返しの周期を1周期とし、撮像手段が有する1画素が測定対象物面上において撮像する範囲を撮像間隔とし、投影されたパターン光の測定対象物面上での1周期の長さを撮像間隔のM倍としたときに、「2×N−0.2≦M≦2×N+0.2(ただし、Nは2以上の整数値)」を満たすように投影手段と撮像手段が配置されている。
(もっと読む)
三次元計測装置、三次元計測方法、及びプログラム
【課題】パターン投影三次元計測装置で境界の信頼度を精度よく算出する。
【解決手段】パターン光を対象物体に投影し、対象物体により反射された反射パターン光から対象物体の三次元形状情報を算出するための三次元計測装置であって、明部と暗部とが交互に配置された縞パターン光の反射パターン光を第1の画像データとして撮像し、当該縞パターン光の明部と暗部とが反転した逆縞パターン光の反射パターン光を第2の画像データとして撮像する撮像部と、第1画像データおよび第2の画像データに基づき、明部と暗部との境界位置を決定する決定部と、第1の画像データの第1の輝度勾配と、第2の画像データの第2の輝度勾配との相関から境界位置の正確性を示す信頼度を算出する信頼度算出部と、を備える。
(もっと読む)
形状測定装置および形状測定方法
【課題】凹凸形状の測定精度の向上を図ることができる形状測定装置を提供する。
【解決手段】本発明の形状測定装置は、測定対象1の凹凸形状にライン光を照射する投光装置2と、前記投光装置2によって前記凹凸形状に形成される光切断線を撮像する撮像装置3と、前記凹凸形状の上底及び下底の各々で前記光切断線の幅が最小になるように前記投光装置2をその光出射軸方向4に移動させる駆動装置5と、前記撮像装置3によって撮像された、前記凹凸形状の上底で前記光切断線の幅が最小となる画像と、前記凹凸形状の下底で前記光切断線の幅が最小となる画像に基いて、前記凹凸形状の高さ又は深さを算出する処理装置6と、を備える。
(もっと読む)
変位検出装置
【課題】高精度に高さ方向の位置を検出可能な変位検出装置を提供する。
【解決手段】光源1から出射される光を2つの光束に分割する第1の光束分割手段3と、分割された第1の光束を反射する反射部材8と、第1の光束分割手段によって分割された第2の光束を被測定面上に集光する対物レンズ5と、反射された第1の光束と、被測定面によって反射された第2の光束との干渉光を受光する第1の受光手段30と、受光した干渉光強度に基づいて被測定面の高さ方向の相対位置情報を出力する相対位置情報出力手段60と、第2の光束の一部を取り出す第2の光束分割手段20と、取り出された第2の光束に非点収差を発生させる非点収差発生手段10と、非点収差が発生した第2の光束を受光する第2の受光手段40と、検出された受光強度に基づいて被測定面の高さ方向の絶対位置情報を出力する絶対位置情報出力手段50とを含む。
(もっと読む)
光距離計及び距離測定方法
【課題】被測定面の位置をその反射率に左右されず、安定して高精度に測定し得る共焦点分光方式の光距離計及び距離測定方法を提供する
【解決手段】光距離計21は、白色光源22からの照明光を複屈折板27により常光成分と異常光成分とに分離し、被測定面34aの光軸上の異なる位置で結像するように投射する。被測定面からの反射光を合波し、回折格子29により波長毎に分散させ、複屈折板30により再び常光成分と異常光成分とに分離して撮像素子31に入射させる。信号処理部33が、撮像素子から出力された電気信号を処理して常光成分及び異常光成分の光強度P1,P2を検出しかつ差分ΔP=P1−P2を算出する。差分ΔPが0となる波長λ0を検出することによって、被測定面の位置が求まる。
(もっと読む)
光学式表面粗さ測定装置
【課題】 微小な凹凸に加えて周期と変動量の大きな凹凸が存在する測定対象物の表面粗さも検出できるようにする。
【解決手段】 測定対象物OBの表面上を接触しながら移動するスライダ44に対物レンズ305を配置するとともに、スライダ44をプローブ40によって光学ヘッド本体30に弾性的に支持する。レーザ光源301からのレーザ光を対物レンズ305により集光させて測定対象物OBの表面に照射し、測定対象物OBの表面からの反射光をフォトディテクタ308で受光して、フォーカスエラー信号を生成する。フォーカスエラー信号を用いてレーザ光の焦点位置から測定対象物OBの表面位置までの距離に応じて変化する距離を計算して、前記計算した距離に、スライダ44の光学ヘッド本体30に対する相対位置の変動量を加味して測定対象物OBの表面の基準面に対する凹凸の大きさを計算する。
(もっと読む)
光学式検出装置および電子機器
【課題】複雑な画像信号処理回路なしに簡単な構成で手などの人の動きを容易に検出できる小型で安価な光学式検出装置を提供する。
【解決手段】エリアセンサである発光素子2と、発光素子2から出射された光束を測定対象物20に照射する発光レンズ部4aと、測定対象物20からの反射光を集光する受光レンズ部5aと、受光レンズ部5aにより集光された測定対象物20からの反射光を検出する受光素子3と、受光素子3からの受光信号を処理する信号処理部7とを備える。上記信号処理部7は、受光素子3からの受光信号に基づいて、受光素子3上の光スポット位置または光スポット形状の少なくとも一方からxy座標平面上の測定対象物20のx座標またはy座標の少なくとも一方を検出する。
(もっと読む)
変位センサ
【課題】高速、且つ高精度に受光中心位置を検出可能な変位センサを提供する。
【解決手段】変位センサ10は、受光信号を順次読み込み、受光信号を時間で二次微分して二次微分信号を生成し、その二次微分信号が正値から負値に変化するゼロクロス点における画素の受光信号レベルをしきい値に設定し、そのしきい値以上の画素範囲を演算範囲に設定する制御部16を備える。この制御部16は、上記設定した演算範囲にて重心演算を行って受光波形の重心位置を算出し、その重心位置を受光中心位置として検出する。
(もっと読む)
ウェブ基準を使用して位相固定したウェブ位置信号
ウェブの移動エンコーダ信号を検知したウェブ基準信号に位相固定すること含む、ウェブ位置の決定を向上させるための手法。基材の長手方向軸に沿って配置された基準が検知され、対応するセンサ信号が生成される。推定ウェブ位置は、1つ以上のエンコーダ信号によって提供される。センサ信号とエンコーダ信号との間の位相差が計算され、位相差に基づいてウェブ位置の誤差が決定される。ウェブ位置の誤差信号は、ウェブ位置の決定の精度を向上させるエンコーダ信号を調整するためにフィードバックすることができる。  (もっと読む)
(もっと読む)
測定方法及び測定装置
【課題】被検面としての非球面の形状を高精度に測定する測定方法を提供する。
【解決手段】球面波を形成する光束を用いて非球面を有する被検面を照明し、前記被検面の形状を測定する測定方法であって、球面波の曲率中心が前記非球面の非球面軸上にある状態で前記非球面軸の方向に前記被検面を駆動して複数の位置に順に位置決めし、前記複数の位置のそれぞれにおいて、前記被検面からの光束と参照面からの光束との干渉パターンを検出する第1の検出ステップと、前記複数の位置のそれぞれから前記非球面軸の方向に前記被検面を既知の量だけシフトした複数のシフト位置のそれぞれに位置決めし、前記複数のシフト位置のそれぞれにおいて、前記被検面からの光束と前記参照面からの光束との干渉パターンを検出する第2の検出ステップと、を有することを特徴とする測定方法を提供する。
(もっと読む)
光学特性計測方法、露光方法、及びデバイス製造方法
【課題】投影光学系の光学特性の計測時間を短縮する。
【解決手段】
スリット板190を投影光学系PLの光軸AXに対して平行に一側から他側に(又は他側から一側に)駆動しつつ、スリット板190の光軸AXに平行なZ軸方向の位置データと、計測用レチクルRmに形成された計測マークPMの投影光学系PLによる投影像(空間像)の強度データ(すなわち、スリット板190のスリット122を通過する照明光ILの強度データ)と、を計測する。これにより、初期位置を中心としてスリット板を上方及び下方に往復駆動する従来の空間像計測方法を用いる場合に比べて、投影光学系の光学特性の計測に要する時間を短縮することが可能となる。
(もっと読む)
穴形状測定装置および穴形状測定方法
【課題】 穴の全体形状だけでなく、穴の壁面に形成された微細な凹凸形状をも精度良く測定する。
【解決手段】 管状プローブ80からレーザ光を測定対象穴の壁面に照射し、レーザ光の焦点位置と壁面における反射位置とのずれ量(焦点ずれ量)に応じたフォーカスエラー信号を生成するフォーカスエラー信号生成回路111,112を備える。コントローラ100は、管状プローブ80を回転させながらZ方向(管状プローブの中心軸方向)に移動させて、レーザ光を測定対象穴の壁面に螺旋状に照射する。そして、管状プローブ80のZ方向位置と、管状プローブ80の回転角度と、フォーカスエラー信号から得た焦点ずれ量とに基づいて測定対象穴の3次元形状を算出する。
(もっと読む)
姿勢測定方法及び研削装置
【課題】 複数のセンサの計測位置を結ぶ直線とスキャン方向との相対位置関係を高精度に計測する。
【解決手段】 (a)評価対象物の表面上で計測位置を移動させることによって、表面の高さ方向の、面内における変化を計測する第1及び第2のセンサの計測位置を、1つの円周の少なくとも一部を構成する段差パターンと2箇所で交差する直線に沿って並進移動させ、第1及び第2のセンサの計測位置が、段差パターンと交差する面内位置の情報を取得する。(b)取得された情報に基づいて、第1のセンサの計測位置と第2のセンサの計測位置とを結ぶ直線と、並進移動の方向との相対位置関係を求める。
(もっと読む)
基準位置検出装置、基準位置検出装置を有するカメラ、制御方法、およびプログラム
【課題】 高精度で機械的な駆動を行う機構の基準位置を検出する。
【解決手段】 基準位置検出装置は、発光手段と、前記発光手段からの光を受光する受光手段と、前記発光手段からの光を遮光する遮光手段と、前記遮光手段によって前記発光手段からの光が遮光されていない開口状態において、前記発光手段からの光の発光量を変化させることより、前記遮光手段からの出力が予め定められた基準となるときの前記発光手段からの光の発光量を決定する決定手段と、前記決定手段によって決定された発光量で前記発光手段を発光させることにより、機械的に駆動を行う機構の基準位置を検出する検出手段とを有する。
(もっと読む)
光スポット変位検出装置及び計測装置
【課題】光スポットの変位を検出することを原理とする光学式センサにおいて、アナログ型のものは測定範囲が狭い、ダイナミックレンジが狭いなどの難点があり、ディジタル型のものは処理が面倒で、応答が遅いという難点があった。
【解決手段】光スポットの光強度を単独のフォトダイオードで検出することを基本として、受光素子前に光スポットよりピッチの短い格子を置くことでディジタル信号を得ると共に、広範囲の光スポット変位に対応できるアナログ型の検出器を併用する。
(もっと読む)
変位検出装置
【課題】光源の波長変動に関係なく、高い安定性で高精度に被測定面の変位を検出する。
【解決手段】光源102から射出された射出光Lは偏光ビームスプリッタ108等を介して第1の色消しレンズ150Aに入射される。第1の色消しレンズ150Aでは射出光Lの波長変動によって生じた焦点距離のずれが補正される。被測定面TGで反射された反射光Lrは偏光ビームスプリッタ108等を介して第2の色消しレンズ150Bに入射される。第2の色消しレンズ150Bでは、射出光Lや反射光Lrの波長変動によって生じた焦点位置のずれが補正される。これにより、対物レンズを含む光路上のレンズによって生じる色収差を補正することができ、高い安定性かつ高精度に被測定面の変位を検出することができる。
(もっと読む)
塗装状態検査装置および検査方法
【課題】 複雑な画像処理を経ることなく、塗装面の状態を精確に反映した検出値により信頼性の高い平滑性検査を安定的に行なうことができる塗装状態検査装置および検査方法を提供する。
【解決手段】 塗装面4上の被検査面40に、全面的な暗部(20b)と該暗部中に配置された細線状の明部(20a)で構成された明暗画像(20)を投影する画像投影手段2と、被検査面40の投影画像(50)を撮像する撮像手段3と、得られた多階調画像50を所定の閾値(VT)で2値化し、その2値画像における明暗境界線(52c)を抽出する画像処理手段5と、前記明暗境界線の波形を解析して塗装面の平滑性を判定する判定手段とを備えた。
(もっと読む)
1 - 20 / 28
[ Back to top ]