
Fターム[2F065SS12]の内容
光学的手段による測長装置 (194,290) | 指示;記録 (4,025) | 指示、記録手段 (1,873) | 光学的 (1,748)
Fターム[2F065SS12]の下位に属するFターム
Fターム[2F065SS12]に分類される特許
21 - 40 / 54
位置寸法測定装置
【課題】容易、かつ、確実に光軸を調整することが可能な位置形状測定装置を提供する。
【解決手段】光軸調整処理時には、処理回路260は複数の画素PXにより形成される受光領域を、その中心線により2つの領域に仮想的に分割する。そして、処理回路260はその2つの領域の一方(第1の領域)での受光量と他方(第2の領域)での受光量とを算出する。光軸A1と光軸A2とが一致した場合には、第1の領域の受光量と第2の領域の受光量とのバランスが取れた状態になる。一方、光軸A2に対して光軸A1がずれた場合には、第1の領域の受光量と第2の領域の受光量とがアンバランスになる。処理回路260は算出した受光領域の受光量分布に基づいて、第1の領域での受光量と第2の領域での受光量とのバランスに関する受光量バランス情報を生成して出力し、LED280を点灯あるいは消灯させる。
(もっと読む)
位置寸法測定装置

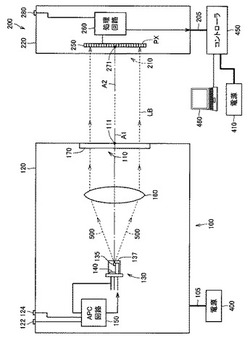
【課題】光学式の位置寸法測定装置によって、測定対象物体が光を透過および/または反射する物質により構成される場合であってもエッジを正確に検出する。
【解決手段】投光器100は、半導体レーザ130と、APC回路150と、コリメートレンズ160と、光量減衰フィルタ170とを含む。APC回路150は、モニタ用フォトダイオード140の受光量に基づいて、レーザ光出力が目標出力に維持されるようにレーザチップ135への供給電流をフィードバック制御する。光量減衰フィルタ170は、測定対象物体300からの反射光510に代表される外乱光が、モニタ用フォトダイオード140へ至る経路上に配置され、APC回路150によるフィードバック制御に悪影響を与えないように外乱光を減衰させる。
(もっと読む)
計測装置
【課題】 露光装置に適用してその装置ダウンを防ぎ(延命し)、またスループット低下、光学系ユニット劣化を早期に警告することができる計測装置を提供する。
【解決手段】 光源12と、蓄積型の2つの光検出器9、10と、前記光源からの光の量を調節する、前記2つの光検出器に共通の調光器11と、前記2つの光検出器の出力が許容範囲内になるように前記調光器を制御する制御器13とを有し、前記調光器により光量が調節された光で照明された2つの対象物からの光を前記2つの光検出器でそれぞれ検出することにより計測を行う。ここで、前記制御器は、前記調光器を制御することにより前記2つの光検出器のうち一方のみの出力が該許容範囲内になった場合に、前記2つの光検出器のうち他方の出力が該許容範囲内になるように該他方の蓄積時間を設定する。
(もっと読む)
バルブボデーの加工穴のバリ検出方法
【課題】バリの検出を適切に開始することができるバルブボデーの加工穴のバリ検出方法を提供する。
【解決手段】SNRがSNR閾値をこえた状態からSNR閾値未満に変化した時点に対応する前記反射部位をエッジ部として検出する。さらに、高さ位置データZ(高さ位置データZ下限値を含む。)がZ閾値ZSより小さいと判定される部位(低レベル部位)ひいてはエッジ部からバリ検出を開始させる。溝部15の側壁17には傾斜(鋳抜き勾配)が形成されていることから、SNR及びSNR閾値を用いてエッジ部を決定してバリ検出開始側部分を定めることにより、エッジ部の検出を高さ位置データZのみにより行う場合に比して、バリ検出開始すべき位置を精度高く把握でき、ひいてはバリ検出の精度向上を図ることができる。
(もっと読む)
光学式変位センサ
【課題】 検出対象物の位置が検出対象物の厚みよりも大きく変動する場合であっても、検出対象物を正しく検出することができる光学式変位センサを提供する。
【解決手段】 検出対象物に投射光L1を照射する投光器11と、検出対象物による反射光L2を受光する受光器14と、受光器14の出力に基づいて検出対象物の変位量を算出する変位量算出部31と、変位量を一定の時間間隔でサンプリングして変位量の差分値を求める差分値生成部33と、差分値をプラス側閾値37a及びマイナス側閾値37bと比較する差分値比較部34と、この比較結果に基づいて検出対象物の有無を示す検出信号を出力する対象物検出処理部35により構成される。対象物検出処理部35は、差分値及びプラス側閾値37aの比較結果、及び、差分値及びマイナス側閾値37bの比較結果のいずれか一方の比較結果に基づいて検出信号をオンさせ、他方の比較結果に基づいて検出信号をオフさせる。
(もっと読む)
製函機における折れ精度検査装置及び折れ精度検査方法,製函機,並びに折れ精度調整方法
【課題】誤寸折れを含む段ボールケースの折れ精度不良を製造過程で確実に検出することができ、機械の構造及び製造工程の制約を低減可能とした、製函機における折れ精度検査装置及び折れ精度検査方法,製函機,並びに折れ精度調整方法を提供する。
【解決手段】製函機において折り畳まれた段ボールケース1の幅方向両側の折部分の折れ精度を検査する装置であって、段ボールケース1の幅方向両側において上下に重なる両フラップ部1A,1Bの端部の相対位置関係を検出する相対位置検出手段20と、相対位置検出手段により検出された両フラップ部1A,1Bの端部の相対位置関係から前記折部分の折れ精度の良否を判定する良否判定手段と、をそなえて構成する。
(もっと読む)
角度表示装置
【課題】電動ドリル等で一定の角度で穴あけ加工を行う場合、作業に伴う角度計測、及び加工中の角度計測を同時に行える手段が無く、両手がふさがることで高所作業では危険が伴った。距離センサーと制御回路で構成する片手で操作でき加工中でも角度を視認、計測できる角度表示装置を提案する。
【解決手段】 電動ドリル等の回転軸円周上の上下左右方向に光学式反射型距離センサー1、2、3、4を配置し、順次駆動回路5、計測変位量比較回路6、計測値表示回路7、上下方向角度表示装置8、左右方向角度表示装置9、電源10、スイッチ11、ハウジング12で構成される角度表示装置。電動ドリルに装着するため片手で操作でき、ドリル軸回転中、暗所、作業者の姿勢、利き腕、加工対象物の傾斜、円筒面、球面に関わらず角度の視認、計測が可能であり、加工中でも角度修正が容易な角度表示装置。
(もっと読む)
変位センサ
【課題】ユーザにとっての使い勝手を向上させることが可能な変位センサを提供する。
【解決手段】レーザダイオード207から発せられたレーザビームは計測対象300の表面に照射される。これにより反射光L2が生じる。撮像素子205は反射光L2を受ける。センサヘッド部200から距離Bだけ離れた測定基準位置(測定中心)に対応する受光位置(受光基準位置)を必ず含むように撮像素子205の撮像領域に処理対象領域が特定される。センサ本体部はこの処理対象領域から読み出した信号に基づいて変位計測処理を行なう。測定範囲あるいは測定精度が変更された場合にも処理対象領域の中に受光基準位置が必ず含まれるので変位センサと計測対象との距離を変えることなく変位量の計測が可能になる。
(もっと読む)
カメラ、カメラシステム、及び姿勢調整方法
【課題】コピースタンドで複写を行う際には原稿台とカメラの傾き(平行度)を調整する必要がある。傾き情報を求めて表示することにより調整の目安とし調整作業を簡易化する。
【解決手段】撮影画面内に設定した複数の焦点検出領域における焦点調整状態に基づいて、被写体を平面としたときの撮像面の傾斜情報を求める演算手段を設け、演算した傾斜情報を表示手段に表示する。この表示に従ってカメラのピッチ方向とヨー方向の回転調整を行い、原稿台とカメラ間の傾き(平行度)を修正する。
(もっと読む)
箱用段ボールシート開封部の位置検査装置
【課題】箱用段ボールシートの開封部と切り目との相対位置のずれを、出荷前に的確に検査できるようにすることである。
【解決手段】箱用段ボールシート10の内面側で開封部としてのライナカット12と、掴み部を形成する切り目13が幅方向で交絡する部位を撮影するCCDカメラを設け、このCCDカメラで撮影された画像から、ライナカット12と切り目13との幅方向での相対位置を、両者の幅方向中心位置のずれ量δで検出し、このずれ量δが所定の閾値を越えたときに、その箱用段ボールシート10を不良品と判定することにより、箱用段ボールシート10のライナカット12と切り目13との相対位置のずれを、出荷前に的確に検査できるようにした。
(もっと読む)
異形断面圧延材の幅測定方法および幅測定装置
【課題】連続的に幅差を測定でき、前記幅の差が設定値を越えたとき、信号を発することができるような方法及び装置を提供する。
【解決手段】異形断面材の帯板が長さ方向に送られるものにおいて、帯板の幅方向に沿って長い照明部で、異形断面材の上面に光を照射し、照射された光線の反射光をカメラレンズで集光する。帯板幅方向に沿った直線上に並んだ受光素子をもつラインセンサーで、照射された光線の反射光の強弱を検知し、電気信号に置き換え、ラインセンサーに演算処理部を接続し、異形断面材の平坦部と段部とで反射光の強弱を読み取り、読み取った光量信号から平坦部と段部を識別し、各々の幅を測定する。段部を介して離れた2箇所の平坦部の各々の幅の差、又は平坦部とそれに続く段部との合計幅の差を計算し、データ管理装置を前記演算処理部に接続し、前記幅の差に関するデータを記憶させて幅の差を確認する。
(もっと読む)
光電センサ
【課題】様々な表面加工がされている物体、あるいは、様々な包装で包まれている物体についても、精度よく物体の検出を行う技術を提供することを課題とする。
【解決手段】センサヘッドは、光を照射して、その反射光をラインセンサで受光する。そして、ラインセンサの出力から受光量分布を得る。受光量分布に、複数の極大値が検出された場合(ステップS23でNO)には、多重反射が発生していると判断し、物体が存在すると判定する。極大値が検出されない場合(ステップS23でNO)にも、状態が変化したことから物体が存在すると判定する。また、極大値の数が1つであっても、ピークの位置が閾値の範囲を超えていれば(ステップS24でNO)、物体が存在すると判定する。さらに、受光波形の幅が規定範囲内を超えている場合(ステップS25でNO)にも、物体が存在すると判定する。
(もっと読む)
設定ひずみ告知型目視光ひずみ計
【課題】装置コストが低く、極めて簡単な測定作業により被測定部材のひずみを測定できる設定ひずみ告知型目視光ひずみ計を提供する。
【解決手段】基材10の長手方向の両端を、構造物の壁面等の被測定個所に固定し、光ファイバー12中にレーザ光等の光を導入する。この状態で、被測定個所にひずみが発生すると、この被測定個所に固定された基材10にひずみが伝達される。基材10には切り欠き部16及び円孔部18が形成されているので、応力集中が起き、全体のひずみが円孔部18で挟まれた部分に集中する。このため、円孔部18で挟まれた部分が伸張する。この結果、基材10の円孔部18で挟まれた部分に接着されている光ファイバー12にもひずみが生じ、破断ひずみを越えると破断される。光ファイバー12が破断されると、その中に導入されたレーザ光が散乱し、ひずみが生じたことを観察者に告知できる。
(もっと読む)
光学式レインセンサが組み込まれているヘッドライトモジュール
車両(110)の、目標走行路からの逸脱を識別するための装置が提案される。装置は少なくとも1つのヘッドライトモジュール(118,120)を有している。少なくとも1つのヘッドライトモジュール(118,120)は走行路領域を可視光で照明するための少なくとも1つの半導体光源(132,134)を有している。更にヘッドライトモジュール(118,120)は少なくとも1つの半導体光源(132,134)を冷却する少なくとも1つの冷却エレメント(146,148)を有している。更にヘッドライトモジュール(118,120)には、少なくとも1つの冷却エレメント(146,148)に熱結合されていて、照明された走行路領域を少なくとも部分的に捕捉検出する、カメラ像を撮影するための少なくとも1つのカメラ(150,152)が設けられている。本発明の装置は更に、該カメラ像を評価しかつ車両(110)の、目標走行路からの逸脱を識別するための少なくとも1つの電子的な評価装置(158)を含んでいる。  (もっと読む)
(もっと読む)
コンベアチェーンの交換時期検出装置及びコンベアチェーンの交換時期検出方法
【課題】 磨耗が激しい1ピッチ分のチェーンのみを交換することを可能としたコンベアチェーンの交換時期検出装置と方法を提供する。
【解決手段】 投光−受光ユニット22が隣接する一方のドッグ11の後端を検出した時点で、同時に変位量測定ユニット23によって他方のドッグ11の後端の基準位置からのズレ量を制御装置20で算出し、その値が閾値を超えている場合には、塗装ガン24に作動信号を出力する。そして、前記ドッグ11が塗装ガン24の正面にきたならば、塗装ガン24からドッグ11に塗料を噴出し、交換すべき1ピッチ分を示す目印をドッグ11に付着する。
(もっと読む)
版胴のプリセット装置
【課題】作業者の安全が確保され、個人差(誤差)が排除され、容易、迅速かつ高い精度で、版胴の周方向位相と横方向位置を同時に調整するためのプリセット装置を提供する。
【解決手段】印刷ユニットにおいて版胴101の周方向位相及び横方向位置を合わせるプリセット装置であって、光軸方向が前記版胴101の回転軸に直交するレーザ光線を前記版胴の周面に投光する投光部1と、前記版胴101の周面において乱反射した前記レーザ光線を受光し受光信号を出力する受光部2と、前記投光部1と前記受光部2を一体で支持する支持部4と、前記支持部4を前記版胴101の回転軸に平行方向に移動可能に支持するレール5と、前記受光信号を入力して前記乱反射光の大きさを表示する表示部とを具備するようにしたプリセット装置。
(もっと読む)
異物検出装置及び異物検出方法
【課題】 ローラに付着してシート上にしわや凹凸状の欠陥を発生させる異物を確実かつ容易に検出可能な異物検出装置及び異物検出方法を提供する。
【解決手段】 異物検出装置(10)は、ローラ(3)に光を照射する光源(7)と、ローラ(3)からの反射光を受光して当該ローラ(3)の画像を撮像する撮像手段(8)と、撮像手段(8)により撮像された撮像画像の輝度の変化を輝度データとして抽出する輝度データ抽出手段(13)と、前記撮像画像の輝度データが予め設定された閾値内か否かを判定し、その閾値外の場合にローラ(3)に付着した異物と判定する判定手段(14)とを備える。
(もっと読む)
光ジャイロ較正装置、光ジャイロを搭載するロボット及び光ジャイロ較正プログラム
【課題】ジャイロを搭載するロボットにおいて、ロボットの位置及び方位の測定を容易にし、ノイズの影響を抑制してジャイロの較正を行うことを可能にすることである。
【解決手段】ジャイロを搭載するロボットにおいて較正を行うときは、目標壁面に対してロボットよりレーザービームを照射し、目標壁面上に占めるレーザーポイントの位置を測定してその状態の位置データを初期値として取得し(S10,S12)、較正が開始すること等を表示する(S14,S16)。そして較正期間をリセット(S18)して較正期間の計時処理を開始する。所定の較正期間の間は光ジャイロの検出値をサンプリングにより継続して取得する(S20)。取得中に外乱があると警報を出力し、較正をやり直す。較正期間中に外乱がなく満了すれば、較正期間内の検出値に基づき較正値が設定される(S26,S28)。
(もっと読む)
外観検査方法及び外観検査装置
【課題】
従来の欠陥検査は、各ブロックについて、比較する各視野の画像同士が同一のパターンである必要がある。そのため、例えば、欠陥の位置が分かっていても、その位置へ移動し、より拡大した画像を取得して、自動的に欠陥を抽出することは困難であった。
【解決手段】
低倍のレンズで周囲画像と輝度比較し、そこからレンズの倍率を段々高倍率に設定しながら、画像処理を行って欠陥の検査していく。またこのとき、同一パターンとの比較をせず、本来のパターンと欠陥とは、輝度波形の傾斜の傾きで区別する。
(もっと読む)
三角測距式光電センサー
【課題】距角が変更設定可能な三角測距式光電センサーにおいて、測距角の調整状態が最適か否かをユーザーに知らせる。
【解決手段】対象物に向けて光を投光する投光部と、対象物からの反射光を受光する受光素子を含む受光部と、受光素子の受光面における受光スポット位置又は受光量分布の重心位置を求めることにより対象物までの距離を求める主制御部とを備え、投光部の光軸と受光部の光軸とが成す角度である測距角が変更設定可能な三角測距式光電センサーにおいて、対象物までの大まかな距離に応じて設定される測距角が最適に設定されているか否かを受光素子から得られた信号に基づいて主制御部が判断し、その判断結果を表示出力する。
(もっと読む)
21 - 40 / 54
[ Back to top ]