
Fターム[2F077AA26]の内容
感知要素の出力の伝達及び変換 (32,270) | 目的、特徴、課題 (5,635) | 分解能の切換え (36)
Fターム[2F077AA26]に分類される特許
1 - 20 / 36
検出装置および光学装置
エンコーダおよびこれを備えた装置
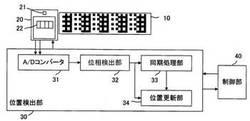
【課題】複数の周期パターンに対する検出部による検出周期を切り替えるエンコーダにおいて、位置検出の遅れを回避する。
【解決手段】エンコーダは、第1の周期パターン11および第2の周期パターン12が設けられたスケール10と、該スケールとの相対移動が可能な検出部22とを有する。検出部22は、第1の検出状態と第2の検出状態との切り替えが可能であり、第1の検出状態にて第1の周期パターンに応じた第1の信号を出力し、第2の検出状態にて第2の周期パターンに応じた第2の信号を出力する。処理部30,40は、検出部から取り込んだ第1および第2の信号の双方を用いて第1の絶対位置を算出する第1の処理を行った後、該検出部から取り込んだ一方の信号を用いて相対移動量を算出する。処理部は、第1の処理において最後に設定した検出状態と同じ検出状態の検出部から一方の信号を取り込む。
(もっと読む)
動的自動利得制御機能を有するセンサインタフェースの方法及びシステム

【課題】動的自動利得制御機能を有するセンサインタフェースの方法等を提供する。
【解決手段】所与のターゲットの速度範囲全体にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。センサから交流差動電圧信号を受信するステップを含む。交流差動電圧信号の振幅は、時間とともに変化する。交流差動電圧信号は、動的スケーリングが可能な減衰済みシングルエンデッド電圧信号に変換される。減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号をスケーリングすることが可能である。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される。
(もっと読む)
位置検出装置およびモータ駆動装置
【課題】主に、変位検出部の検出分解能を変更することなく、検出する位置情報の分解能を設定、変更することができるようにする。
【解決手段】位置検出部(エンコーダ1、ホールIC6)と、変位検出部(エンコーダ1)と、カウント部(エッジ検出部20、非整数分周器21、角度カウンタ31,32)とを備える。そして、カウント部(エッジ検出部20、非整数分周器21、角度カウンタ31,32)を、変位パルス(エンコーダパルスenca)のエッジが所定の区間エッジ数(分周比分母DEN)だけ到来する間に、区間エッジ数(分周比分母DEN)よりも小さい所定の非カウント数(分周比分母DENと分周比分子NUMとの差)だけ変位パルス(エンコーダパルスenca)のエッジをマスクしてカウントし得るように構成する。
(もっと読む)
バーニア式位置検出装置
【課題】装置の構造を簡素化することができ、かつ簡単な処理にて位置を検出することができるバーニア式位置検出装置を提供する。
【解決手段】回転板3の内側寄りに、磁極対が4つの内側磁極パターン6bを設け、回転板3の外側寄りに、磁極対が3つの外側磁極パターン7bを設ける。内側磁極パターン6bの対向位置に第1センサ部6aを設け、外側磁極パターン7bの対向位置に第2センサ部7aを設ける。第2センサ部7aは、外側磁極パターン7bに対して回転板3の回転方向に所定量ずらして配置される。このため、第1センサ部6a及び第2センサ部7aの信号組合せと、回転板3の検出角度とが一義的な値をとる。よって、第1センサ部6a及び第2センサ部7aの信号組合せを単に確認するだけで、回転板3の回転角度が検出可能となる。
(もっと読む)
回転角度検出装置
【課題】任意のタイミングでオフセット補正を可能とし角度検出精度を向上させた回転角度検出装置を提供する。
【解決手段】回転角度検出装置は、オフセット補正するにあたり、回転角度θに対応する電気角が予め定めた所定角度になるタイミングをレゾルバ信号evの振幅中心値を算出するタイミングとして設定するとともに、レゾルバ信号evの値と所定角度とに基づいてレゾルバ信号evの最大値及び最小値を算出するための比率に関する比率情報を予め設定しておき、算出タイミングで算出されるレゾルバ信号evの最大値及び最小値からレゾルバ信号evの振幅中心値を求め、この振幅中心値と基準中心値との偏差に基づいてオフセット補正を行う。
(もっと読む)
回転角度検出装置
【課題】励磁コイルを多重に形成して、渦電流を生じさせる領域を変化させることで、2つの溝間における回転体の回転角度を精度良く検出することを可能とした回転角度検出装置を提供する。
【解決手段】円盤状の回転体20と、回転体20の円盤面に交番磁界を付与することにより渦電流を発生させる励磁コイルと、回転体20の円盤面に発生した渦電流に起因して生じる磁界を検出する検出コイルとを備え、回転体20の円盤面には、その回転方向に角度間隔をおいて複数の溝Dを設け、検出コイルを通じて検出される磁界の変化に基づいて溝Dの有無を検知することにより、回転体20の2つの溝D間における回転角度を求める回転角度検出装置であって、励磁コイルは、回転体20に生じさせる渦電流の領域を可変するために、個別に通電される径の異なる複数のコイルが同心円上に配設されてなる回転角度検出装置。
(もっと読む)
センサ信号処理回路
【課題】2種類のセンサ信号を処理する回路を簡単化する。
【解決手段】回転体2の回転に追従して周期的に変化する第1センサ信号V1と、それと異なる位相で周期的に変化する第2センサ信号V2を処理する回路であり、兼用処理回路20と、第1保持回路10と、第2保持回路14と、第1センサ信号と兼用処理回路を接続する第1状態と、第2センサ信号と兼用処理回路を接続する第2状態の間で切り換わる第1スイッチ24a,24bと、兼用処理回路と第1保持回路を接続する第1状態と、兼用処理回路と第2保持回路を接続する第2状態の間で切り換わる第2スイッチ26a,26bと、時分割判定処理回路28を備えている。時分割判定処理回路は、第1センサ信号が低周波である間は第1スイッチと第2スイッチの両者を第1状態と第2状態の間で交互に切り換え、第1センサ信号が高周波である間は第1スイッチと第2スイッチの両者を第1状態に固定する。
(もっと読む)
回転角度検出装置
【課題】磁性検出体の偏心量を小さく構成し、回転時の不具合の低減を図ることができる回転角度検出装置を提供する。
【解決手段】磁性検出体11は、円盤状をなし、径方向内側部分には外周面11cからの磁性部分11dの長さdを回転方向に徐々に変化させる溝部11bを備えてなる。そして、回転方向においてのその磁性部分11dの長さdの変化に基づく交番磁界の変化が磁気センサ12にて検出され、該検出により磁性検出体11の絶対角θ1の検出が行われる。
(もっと読む)
回転検出装置および回転検出装置付き軸受
【課題】 検出対象の回転体の回転速度に応じて検出分解能を選択できて、標準的な入力信号分解能の処理制御装置でも回転検出信号を処理できる回転検出装置、およびその回転検出装置を搭載した回転検出装置付き軸受を提供する。
【解決手段】 回転検出装置1は、円周方向に並ぶ複数の被検出極2cが等配されたエンコーダ2と、その被検出極2cを検出するセンサ3とを有しエンコーダ2が取付けられた検出対象の回転体の回転を検出する。センサ3の出力から被検出極2cの位相を逓倍する逓倍手段4と、その逓倍出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを生成するパルス生成手段5を設ける。また、回転体の回転速度を検出する速度検出手段10と、その検出回転速度に応じてパルス生成手段5の生成するパルスから1種類の倍率のパルスを選択して出力するパルス選択出力手段11を設ける。
(もっと読む)
エンコーダ信号処理装置
【課題】移動体の高速移動と低速移動との切り換えに応じて、移動速度に適した分解能で移動量を測定し、移動量の測定誤差の低減を図る。
【解決手段】回転テーブル50を高速回転させる場合は、検出器1にて検出したエンコーダ信号を第1処理部20で処理して回転角度を示す第1移動量信号a1を出力するように、切換部8にて切り換える。回転テーブル50を低速回転させる場合は、複数の検出器1,2にて検出したエンコーダ信号に基づき合成処理部3にて2倍の周波数の合成信号を生成し、第2処理部30で処理して回転角度を示す第2移動量信号a2を出力するように、切換部8にて切り換える。
(もっと読む)
回転検出装置および回転検出装置付き軸受
【課題】 回転検出装置の出力信号を処理する処理制御装置が標準的なものか、入力信号分解能の高い新規なものかを問わず、対応可能な回転検出装置、およびその回転検出装置を搭載した回転検出装置付き軸受を提供する。
【解決手段】 回転検出装置1は、回転自在に設けられ円周方向に並ぶ複数の被検出極2cが等配されたエンコーダ2と、このエンコーダ2の被検出極2cを検出するセンサ3とを有する。センサ3の出力から被検出極2cの位相を逓倍する逓倍手段4を設ける。この逓倍手段4の出力が入力されて、またはこの逓倍手段4の出力およびセンサ3の検出出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを出力するパルス出力手段5を設ける。
(もっと読む)
レゾルバ・デジタル変換器
【課題】検出誤差を抑制すると共に分解能の変更を容易にすることが可能なレゾルバ・デジタル変換器を提供すること。
【解決手段】レゾルバから入力されるsin相の信号をビットストリーム信号に変換して出力する第1の変換手段と、前記レゾルバから入力されるcos相の信号をビットストリーム信号に変換して出力する第2の変換手段と、ビットストリーム信号をデジタル信号に変換するデジタルフィルタを有し、前記第1の変換手段及び第2の変換手段の出力を用いてトラッキング方式により角度信号を決定し出力する角度信号決定手段と、を備えるレゾルバ・デジタル変換器。
(もっと読む)
エンコーダの誤差補正方法
【課題】分解能変換等の処理を行った場合であっても、出力パルスの精度低下を防ぐことが可能な出力パルスの補正方法を提供する。
【解決手段】可動被検出物の変位に対応して、A相センサから出力される正弦波状のA相信号と、B相センサから出力される正弦波状のB相信号と、を解析することによって可動被検出物の変位の絶対値を検出し、その絶対値に基づきパルス発生回路14から出力される出力パルスの補正方法において、パルス発生回路14の入力値の整数部分を累積加算する第1ステップと、第1ステップの出力値に、2の整数乗からなる分解能変換値を乗ずる第2ステップと、絶対値から、第2ステップの出力値を減算する第3ステップと、第3ステップの出力値を分解能変換値で除算する第4ステップと、第4ステップの出力値の整数部分をパルス発生回路14に入力する第5ステップと、を含む。
(もっと読む)
回転体の角度位置検出装置及び回転数検出装置
【課題】回転体の角度位置検出を低速から高速まで精度良く行う。
【解決手段】レゾルバの低速回転時の出力を高分解能の低速回転用R/D変換器34により検出するとともに、レゾルバの高速回転時の出力を低分解能の高速回転用R/D変換器35により検出し、高速回転用R/D変換器35の出力から回転数演算回路37により回転体の回転数を演算し、この回転数を切換演算関数部37に入力する。切換演算関数部37はこの回転数がn1以下では0を出力するとともに、n2以上では1を出力し、かつn1とn2との間では0と1の間で入力回転数に比例して増大する値を出力する。減算部39は1から切換演算関数部38の出力を減算し、掛算器40は高速回転用R/D変換器35の出力に切換演算関数部38の出力を掛算し、掛算器41は低速回転用R/D変換器34の出力に減算部39の出力を掛算する。掛算器40,41の出力を加算器42で加算する。
(もっと読む)
レゾルバ制御装置、回転角度位置検出装置及びアクチュエータ制御システム
【課題】レゾルバ制御回路と制御装置との互換性を向上するのに好適なレゾルバ制御装置、該レゾルバ制御装置を有する回転角度位置制御装置、アクチュエータ制御システムを提供する。
【解決手段】モータ制御システム1を、回転角度位置検出装置100と、モータ200と、モータ200の動作を制御するモータ制御装置300とを含んだ構成とし、回転角度位置検出装置100を、回転子の回転角度に応じて3相のレゾルバ信号(ABS信号、INC信号)を出力するレゾルバ装置30と、レゾルバ信号に基づきモータ200の回転子の回転角度位置を検出するレゾルバ制御装置40とを含んだ構成とした。そして、レゾルバ装置30とレゾルバ制御装置40とは電気ケーブル70を介して電気的に接続し、レゾルバ制御装置40は、モータ制御装置300にコネクト部80を介して電気的に固定接続した。
(もっと読む)
回転角度位置検出装置
【課題】アクチュエータとの互換精度が良く且つメンテナンス性の比較的高い構造を有する回転角度位置検出装置を提供する。
【解決手段】回転角度位置検出装置1を、軸心を囲む略円筒形状の回転子となるインナハウジング10と、インナハウジング10を被覆するように設けられた前記軸心と同心の略円筒形状の固定子となるアウタハウジング11とによって形成される筐体内に、積層構造の軸受12及び13と、積層構造の単極レゾルバ20及び多極レゾルバ30と、回路基板40とを、この順番に軸心部に対して径方向外側に向かって並設且つ近設した構成とした。更に、レゾルバ20、30と回路基板40とは、これらが配設された空間の上方にこれらを平面視で全体が同時に臨める開口部OP4を設けると共に、この開口部OP4を被覆するように被覆カバー14を設けた。
(もっと読む)
2進および10進の出力を有する絶対位置用磁気エンコーダ
絶対位置用磁気エンコーダは、2進出力に対して構成された第1磁気トラックと、10進出力に対して構成された第2磁気トラックと、上記第1磁気トラックの近傍に位置されて、該第1磁気トラックの磁界を検出する第1磁気センサと、上記第2磁気トラックの近傍に位置されて、該第2磁気トラックの磁界を検出する第2磁気センサとを含む。上記エンコーダは上記2進出力および上記10進出力の内の一方を提供すべく選択的に動作可能である。 (もっと読む)
直線型絶対変位センサ
【課題】高分解能かつ長ストロークで、停電後に被検体の正確な変位が検出でき、しかも構成が複雑化することがない直線型絶対変位センサを提供する。
【解決手段】直線型絶対変位センサ5は、被検体の直線的な絶対変位をピッチ情報と該ピッチ内における微小変位情報とに基づいて検出するものであって、第1センサ出力を出力する第1センサ6と、第1センサ出力と同形式の第2センサ出力を出力する第2センサ7と、第1センサ出力及び第2センサ出力のいずれか一方を選択センサ出力として出力する切換部9と、選択センサ出力から、第2センサ7が選択されている際に被検体のピッチを特定し、第1センサ6が選択されている際に被検体の微小変位を特定し、さらに、特定されたピッチ及び微小変位の情報を保持する処理部9を備え、電源ONに伴い第2センサ7が選択され、これに続いて第1センサ6が選択される。
(もっと読む)
分解能可変型位置検出装置
【課題】高分解能位置検出用の狭いスケールピッチ領域と中低分解能位置検出用の粗いスケールピッチ領域が混在するリニアスケールを用いて、簡単なシステム構成で正確な位置検出を行うことができる位置検出装置を提供する。
【解決手段】高分解能位置検出用の狭いスケールピッチでN極とS極が交互に着磁された領域と、中低分解能位置検出用の前記スケールピッチの整数倍の粗いスケールピッチでN極とS極が交互に着磁された領域とを具備し、リニアスケールの磁界の変化を検出する狭いスケールピッチの4分の1の間隔で配置されたA相磁気検出素子と複数のB相磁気検出素子とを有する磁気ヘッドを有し、複数のB相磁気検出素子の出力パターンから、A相磁気検出素子と4分の1のピッチ間隔になる複数のB相磁気検出素子の中から1つのB相磁気検出素子を選択切替する手段を有することによって、上記課題を解決する。
(もっと読む)
1 - 20 / 36
[ Back to top ]