
Fターム[2F077AA31]の内容
感知要素の出力の伝達及び変換 (32,270) | 目的、特徴、課題 (5,635) | 互換性又は複数機能の付与 (32)
Fターム[2F077AA31]の下位に属するFターム
2軸型 (5)
Fターム[2F077AA31]に分類される特許
1 - 20 / 27
電動機の駆動装置
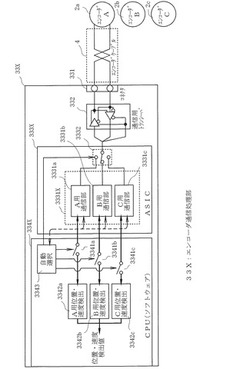
【課題】駆動装置側に複数種類の通信プロトコルに応じた通信部及び検出プログラムを備えることで、使用する検出器の選択肢を拡大する。
【解決手段】電動機の可動子の位置または速度を検出するエンコーダの検出データを、エンコーダとの間のシリアル通信により取得し、前記検出データを用いて電動機を駆動する駆動装置において、複数のエンコーダ2a,2b,2cがそれぞれ有する複数種類の通信プロトコルに従って前記検出データを送受信可能な複数の通信部3331a,3331b,3331cと、これらの通信部を介して受信した前記検出データを処理する複数の検出プログラム3342a,3342b,3342cとを備え、各通信プロトコルに従って送信されたデータ要求コマンドに対する応答データが正しいことをもってエンコーダの通信プロトコルを同定する。
(もっと読む)
回転角検出装置および回転速度検出装置

【課題】磁気抵抗素子を用いた回転角検出装置では、回転角を検出する回転軸の基準位置と磁気抵抗素子の位置とを機械的に精度良く合わせることが困難であるという課題があった。
【解決手段】回転軸を一定速度で回転させることで回転角検出装置を電気的に校正することで、計測精度が高い回転角検出装置を提供する。
(もっと読む)
回転角度位置検出装置
【課題】レゾルバの組み込まれた機械と制御装置との互換性を向上するのに好適な回転角度位置検出装置を提供する。
【解決手段】モータ制御システム1を、レゾルバ10とレゾルバ制御装置20とを含んで構成された回転角度位置検出装置100と、モータ200と、回転角度位置検出装置100で検出された回転角度位置の情報に基づきモータ200の動作を制御する制御装置300とを含んだ構成とし、レゾルバ制御装置20を、演算装置20eと、記憶装置20fと、第1I/F回路20gと、第2I/F回路20hとを含んだ構成とし、演算装置20eによって、第1I/F回路20gを介して取得した、レゾルバ10を組み込むモータ200に関連する機械情報を記憶装置20fに記憶保持し、該機械情報を制御装置300からの取得要求に応じて第2I/F回路20hを介して制御装置300に送信するようにした。
(もっと読む)
ロータリエンコーダの動作異常判定精度向上方法
【課題】動作初期値にロータリエンコーダの個体差でばらつきがあっても、当該ロータリエンコーダの動作異常の判定精度を向上すること。
【解決手段】動作状態検出値がその動作の初期値から一定の範囲隔てた値(異常判定値)まで変動したとき動作異常であると判定する動作異常判定プログラムが設定されているロータリエンコーダ11に対してその動作異常の判定精度を向上させるため、ロータリエンコーダ11に、上記動作異常判定プログラムを実行するCPU37と、上記動作異常判定プログラムを書き換え可能に記憶するフラッシュメモリ39と、を備えさせ、上記動作異常判定プログラム内に書き込まれている初期値(第1初期値)が外部測定した初期値(第2初期値)と相違するときには、動作異常判定プログラムに書き込む初期値を第1初期値から第2初期値に書き換えると共に第2初期値から一定の範囲隔てた値に異常判定値を書き換える。
(もっと読む)
2進および10進の出力を有する絶対位置用磁気エンコーダ
絶対位置用磁気エンコーダは、2進出力に対して構成された第1磁気トラックと、10進出力に対して構成された第2磁気トラックと、上記第1磁気トラックの近傍に位置されて、該第1磁気トラックの磁界を検出する第1磁気センサと、上記第2磁気トラックの近傍に位置されて、該第2磁気トラックの磁界を検出する第2磁気センサとを含む。上記エンコーダは上記2進出力および上記10進出力の内の一方を提供すべく選択的に動作可能である。 (もっと読む)
エンコーダ装置およびその起動方法
【課題】記憶装置に格納されたエンコーダのパルス数や極性などのエンコーダパラメータと、装着するモータの出力や誘起電圧定数、トルク定数などのモータパラメータを自動的に読み出し、エンコーダ信号処理回路に設定することにより、CPUの負荷を軽減し初期化時間を削減することができるエンコーダ装置を提供する。
【解決手段】システムロード開始信号により記憶装置4に格納されたパラメータを自動的に読み出しエンコーダ信号処理回路3の初期設定を行う制御信号生成回路5と、制御信号生成回路が初期設定中に設定する書き込みデータについてサム値の計算を行うサム値計算回路6を備えるようにした。
(もっと読む)
回転型アブソリュートエンコーダの異常検出装置
【課題】多種のロータ径に対して単一のステータ部で対応可能かつ異常検出を可能にする。
【解決手段】2つのステータ部43,33は、ロータ部回転中心に対して、互いに異なる位置に対向設置され、それぞれ、独立してアブソリュート位置を検出するための信号処理回路を内蔵する。ステータ部43は、外部装置34からの要求指令RXを受信すると、自身が検出したシリアル通信信号TX1を送信し、他方のステータ部33は、一方が送信したシリアル通信信号TX1を受信し、その受信したアブソリュート位置と自身が検出したアブソリュート位置の差が180度に対して、予め設定した偏差以上になった場合に位置検出異常として、外部装置34に通知する。
(もっと読む)
回転角度検出装置
【課題】磁界を生成する磁石を測定対象の回転体によらず共通化できる回転角度検出装置を提供する。
【解決手段】回転角度検出装置100は、回転体140と一体に回転するよう固定された異方性電磁体110と、回転体140に近接して非接触で設置された磁気センサ120及び磁石130から構成されている。回転体140には磁石130に代えて異方性電磁体110が固定される一方、磁石130は回転せず、磁気センサ120とともに固定部に固定されている。
(もっと読む)
角度検出信号補正方法および角度検出信号補正装置
【課題】 角度検出信号の誤差を低減し、強度および耐環境性を向上するのに好適な角度検出信号補正方法を提供する。
【解決手段】 レゾルバ10の製造時には、レゾルバ10にマスタRDC20を取り付けて角度検出データθを取得し、取得した角度検出データθの特性に応じてレゾルバ10を分類し、レゾルバ10が属する分類を表示したシールをレゾルバ10に貼付する。そして、レゾルバ10またはRDC20の交換時には、レゾルバ10に貼付されたシールに基づいて、各分類にそれぞれ対応して用意した複数の補正データのなかから、レゾルバ10が属する分類に対応する補正データを選択し、選択した補正データをRDC20のメモリ16に記憶させる。
(もっと読む)
トルク検出装置
【課題】回転軸に加わる回転トルクと共に回転軸の回転角度を検出可能としながら、軸方向長さの短縮要求に応え得るトルク検出装置を提供する。
【解決手段】回転軸としての第2軸1bに樹脂製の保持筒32を介して固定された回転部材としてのヨークリング3,3を備えるトルク検出部1の一側に、保持筒32の延長部に周設した大径の内歯車60と、この内歯車60に噛合する小径の外歯車61,62と、これらの回転角度を検出するための磁気センサ65,66とを備える回転角検出部6を並設する。
(もっと読む)
回転角検出装置
【課題】小型のサイズで絶対舵角と相対舵角信号の両方を出力することができる操舵角検出装置を提供する。
【解決手段】ステアリングシャフトの周期数を含めた絶対舵角αを出力する操舵角検出装置において、サンプリング期間ごとに絶対舵角の変化量を算出し、サンプリング期間と絶対舵角の変化量に基づいて変化間隔を設定し、予め設定されたパルスパターンに基づいて上記の変化間隔で変化するA相、B相およびZ相のパルスを生成する。例えばサンプリング期間10msにおいて絶対舵角の変化量が2°のとき、絶対舵角範囲の所定単位0.5°で変換した変化幅4単位でサンプリング期間10msを除して得た2.5msをパルスの変化間隔として、これらのパルスを相対舵角信号として出力する。多数のスリットを備える大径の円板を必要としないから、装置全体を小型にして形状の自由度を拡大できる。
(もっと読む)
リモートセンシングシステム及び回転数測定装置
【課題】対象物体から離れた位置で該対象物体の回転数又は位置等の情報を精度よく検出すること。
【解決手段】このリモートセンシングシステム10は、回転体1から離れた場所にアンテナ同調回路11が設けられる。アンテナ同調回路11は回転体1の回転によって生じた電磁波を検出して検出信号を出力する。アンテナ同調回路11から出力される検出信号をFFT回路14でスペクトル解析して前記電磁波の周波数を求め、この求めた電磁波の周波数を測定値変換部15に入力する。測定値変換部15は、電磁波の周波数を回転体1の回転数として出力する。
(もっと読む)
回転速度信号出力付き回転角度検出装置および検出装置付き軸受
【課題】 外部回路を用いることなく、回転角度の他に回転速度も検出できる回転速度信号出力付き回転角度検出装置、およびこの回転角度検出装置を組み込んだ検出装置付き軸受を提供する。
【解決手段】 固定部材に対して回転自在な回転軸の軸端に、一対の磁極が形成された磁石を配置する。この磁石と軸方向に対向して前記固定部材に大規模集積回路からなる磁気センサ5A〜5Dを設ける。この磁気センサ5A〜5Dの出力から前記回転軸の回転角度を検出する角度算出手段7を設けて回転角度検出装置を構成する。さらに、前記角度算出手段7で検出した回転角度θの時間変化から回転速度ωを算出する回転速度算出手段8、およびこの回転速度算出手段8の算出した回転速度ωの信号を出力する速度信号出力手段11を設ける。
(もっと読む)
センサ信号入力装置
【課題】センサからの検出信号を処理して制御回路等に入力するセンサ信号入力装置において、入力端子に接続されるセンサの仕様が異なる場合であっても、装置構成を変更することなくそのまま使用できるようにする。
【解決手段】電源投入後、所定の判定時間が経過するまで、入力端子に接続された回転センサ4に電圧を印加して、回転センサ4に電流を流すワンショット発生回路30と、ワンショット発生回路30による回転センサ4への通電中に、入力端子電圧を取り込み、その端子電圧とセンサ種別判定用の判定電圧Vr4,Vr5を比較器42,44で比較することにより、回転センサ4がピックアップコイルからなるMPUセンサか磁気抵抗素子からなるMREセンサかを判定するセンサ判別回路40を備え、その判定結果に従い、検出信号を波形整形するのに使用する回路を自動で変更する。
(もっと読む)
VR型冗長系レゾルバ構造
【課題】本発明は、径の異なる一対の輪状ステータ鉄心間にロータを設け、このロータを各輪状ステータ鉄心に共用することにより、薄型の冗長系レゾルバを得ることを目的とする。
【解決手段】本発明によるVR型冗長系レゾルバ構造は、第1輪状ステータ鉄心(6)、ロータ(4)及び第2輪状ステータ鉄心(9)を同一水平面上に配置し、ロータ(4)を各輪状ステータ鉄心(6,9)に対して共用することにより、薄型に形成した構成である。
(もっと読む)
回転駆動装置
【課題】 回転体の回転速度の検出のための構成を簡略化する。
【解決手段】 回転体1の回転中心にモータ2の回転軸3が、回転軸3には回転体1とモータ2との間に円盤状のエンコーダ4がそれぞれ設けられており、モータ2の回転によって回転体1とエンコーダ4とを同時に同速度で回転させる。エンコーダ4上には、複数のスケール5が回転軸3を中心に環状に配設されており、検出部6がエンコーダ4の回転時にエンコーダ4上の各スケール5に対して光源から光を照射し、各スケール5を透過した透過光をセンサによって検出したときの検出信号を制御部7へ出力し、制御部7は、回転体1の回転中は検出部6からの検出信号に基づいてエンコーダ4の取り付け偏心量を検出し、その検出した取り付け偏心量を補正することによって回転体1を所定の回転速度で回転させ、モータ2の回転数を調整して回転体1の回転速度を制御する。
(もっと読む)
アブソリュート型リニアエンコーダ
【課題】安価で使い易い長尺のアブソリュート型リニアエンコーダを実現する。
【解決手段】検出方向に一列に配置された、アブソリュート目盛12A、12B、42A、42Bを持つ複数のアブソリュートスケール10A、10B、40A、40Bと、該アブソリュートスケール上の目盛を検出するための、スケール接続部14、14A、14B、44では隣り合う2つのアブソリュートスケールの目盛を同時に検出できる間隔Dで固定された複数の検出器22A、22B、52A、52Bと、各検出器毎に絶対位置データを生成する絶対位置データ生成部32A,32B、62A、62Bと、前記検出器毎の絶対位置データ及び検出器の間隔に基づいて、全長にわたる絶対位置データを出力する演算器38、70とを備える。これにより、安価で使い易い長尺のアブソリュート型リニアエンコーダを実現する。
(もっと読む)
温度検出回路および温度検出方法
【課題】モータの回転に対応したパルス信号を送出するオープンコレクタ方式の出力信号をもつエンコーダの温度信号を、信号線の数を増加させることなく、また、パルス信号に影響を与えることなく制御装置側に送信する。
【解決手段】エンコーダ1内に配置したサーミスタ11をトランジスタ12のコレクタCに接続し、信号線3を介してサーミスタ11と直列回路を形成する分圧抵抗22を、制御装置2側に備える。図示しないシステムからCPU21に対してエンコーダの温度検出が要求されると、CPU21は信号線3を介してポート1に入力された信号の2値電圧を検出し、ハイレベルであればポート2をシグナルグランド(SG)と接続する。CPU21はA/D入力ポートの電圧を測定し、この電圧値からエンコーダの温度を演算する。
(もっと読む)
回転入力装置の使用方法
【課題】特別な切替操作を必要とせずに、回転入力装置に多機能を割り振ることを可能とする回転入力装置の使用方法を提案すること。
【解決手段】回転入力機構を備えた入力装置であって、回転入力操作時に最初に操作が行われた位置を検出する機能を備えた回転入力装置において、予め360度の入力方向を区切って複数の領域を設定するとともに、それぞれの領域に異なる操作対象を設定しておき、前記回転入力操作が行われた場合には、最初に操作が行われた位置がどの領域に該当するかを判別し、この選択された領域に応じた操作対象に対して、その後連続して入力される回転入力操作を反映させるようにした。
(もっと読む)
変位測定装置付回転支持装置及び荷重測定装置付回転支持装置
【課題】 1対のセンサ5a、5aの検出信号の位相差に基づいてアキシアル変位又はアキシアル荷重を求める構造で、これら両センサ5a、5aと組み合わせて使用するエンコーダ4aの被検出面の軸方向寸法を小さくできる構造を実現する。
【解決手段】 上記エンコーダ4aに、互いに同心に且つ径方向に重畳して配置した1対の円筒部9、10を設ける。そして、一方のセンサ5aの検出部17を対向させる外径側被検出面11を、径方向外側の円筒部9の外周面に、他方のセンサ5aの検出部17を対向させる内径側被検出面12を、径方向内側の円筒部10の外周面に、それぞれ設ける。これら外径側被検出面11と内径側被検出面12とで、特性変化の境界の傾斜方向を互いに異ならせる。この様な構成を採用する事により、上記課題を解決する。
(もっと読む)
1 - 20 / 27
[ Back to top ]