
Fターム[2F077JJ21]の内容
感知要素の出力の伝達及び変換 (32,270) | 磁気センサを用いた変換(計数型以外) (2,055) | 磁気変化の態様 (620) | 磁性体が移動するもの (77)
Fターム[2F077JJ21]の下位に属するFターム
関数変化型部材を用いるもの (15)
Fターム[2F077JJ21]に分類される特許
1 - 20 / 62
変位検出装置
【課題】磁性体の変位の検出精度を向上させることができる変位検出装置を提供すること。
【解決手段】変位検出装置1は、磁性体4、磁石6、磁気センサ7、およびヨーク9を備え、磁気センサ7の出力値に基づいて、磁性体4の変位を検出する。磁性体4は、磁石6および磁気センサ7の上方の位置と、少なくとも磁気センサ7の上方から外れた位置との間を変位する。磁石6および磁気センサ7の上下にある磁性体4とヨーク9により、磁石6の発生する磁束が集中して、磁気センサ7に誘導される。
(もっと読む)
位置検出装置

【課題】 製品間の品質差を低減可能な位置検出装置を提供する。
【解決手段】永久磁石20は、固定部80に設けられる。ヨーク11は、回転部90に設けられ、永久磁石20の周囲に磁性材料により筒状に形成され、永久磁石20が発生した磁束が優先的に流入する弦部111を有する。弦部111は、内壁の他の部分に対し、永久磁石20に近接するよう形成される。ホール素子31は、固定部80に、永久磁石20に対して定位置に配置される。ホール素子31は、弦部111と永久磁石20との間の磁束の密度および角度に応じた信号を出力する。
(もっと読む)
近接センサ
【課題】磁石のばらつきによる影響を受けない高精度の近接センサとする。
【解決手段】希土類ボンド磁石である磁石10の射出成形時にN、Sの磁極面間の中間に第1ヨークをインサート成形して、第1ヨークの突出部22を磁極面12に対して垂直な壁面から突出させる。第2ヨーク30の突起部32を突出部22に対向させて本体部31を磁石10の壁面に平行に配置し、突出部22と突起部32間の空間には当該突出部と突起部を結ぶ方向を磁気感応方向とするホールIC40を配置する。被検出部材50が磁極面12から離間しているときは磁束が磁気感応方向を横切るが、被検出部材50が磁極面12に近接すると突起部32と突出部22間を磁気感応方向に磁束が流れて、ホールIC40が磁束密度の変化を高感度で検出する。1個の磁石10のみを備えるので、複数の磁石ごとのばらつきや取付けのばらつきによる悪影響を受けない。
(もっと読む)
ストローク量検出装置
【課題】 ストローク量の検出範囲に対して磁気回路の体格を小さくし、ロバスト性に強いストローク量検出装置を提供する。
【解決手段】 第1磁石21と第2磁石22とは、磁気的特性が同一であり、形状および着磁方向が基準点Oに対して対称に設けられる。第1ヨーク31と第2ヨーク32とは、磁気的特性が同一であり、形状が基準点Oに対して対称に設けられる。ヨーク31、32は、磁石21、22と接続し、磁石21、22が発生する磁束を伝達する。第2ヨーク32は第1磁石21と対向し、第1ヨーク31は第2磁石22と対向する。ホール素子5は、基準点Oを通る直進軸x上を相対移動し、感磁面5aが検出する磁束変化により検出対象のストローク量を検出する。これにより、2つの磁石で効率的にストローク量の検出範囲を確保することができる。また、ホール素子5の位置ずれに対するロバスト性に強くなる。
(もっと読む)
位置検出装置
【課題】 特に従来と異なる新しい方式によって高精度な位置検出を可能とした位置検出装置を提供することを目的とする。
【解決手段】 本実施形態の位置検出装置1は、Z方向に間隔を空けて対向し、間隔内であってZ方向に磁場を生じさせる一対の磁石2,3と、一対の磁石2,3間に配置された磁気検出素子5と、X方向に磁石2,3及び磁気検出素子5に対して移動可能な移動体(磁性体)6と、を有する。移動体6は、一対の磁石2,3と磁気検出素子5との間の各空間内にて浮いた状態で介在可能な一対の磁性対向部6a,6bと、各磁性対向部のX方向における一方の端部間を連結する磁性連結部6cと、を備える。移動体6がX方向に移動したときに、磁気検出素子5と磁性連結部6cとの間のX方向への距離の変化に伴う磁気検出素子5の出力変化に基づいて、移動体6の移動位置を検知する。
(もっと読む)
回転角度検出装置
【課題】精度の高い検出結果を広い角度範囲で得ることができる回転角度検出装置を提供する。
【解決手段】回転角度検出装置は、スロットルシャフトにロータで取り付けられる被検出部4と、被検出部4の磁束成分を検出するホールIC5とを備えている。ホールIC5は、被検出部4に対向して配置されて被検出部4の回転面に沿って延びた集磁板51と、被検出部4の磁束成分を検出するホール素子52とを備えており、ホール素子52での検出結果に基づきスロットルシャフトの回転位置に応じた信号を出力する。ホール素子52a,52cは、スロットルシャフトの回転軸を通るX軸方向の磁束成分を検出する。ホール素子52b,52dは、スロットルシャフトの回転軸を通るY軸方向の磁束成分を検出する。被検出部4は、半円環状の磁石42に半円形のヨーク41を組み合わせて構成される。
(もっと読む)
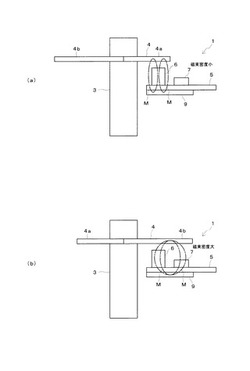
角度検出器
【課題】単一の磁性体で、コストダウンや組み付け作業性の向上を図るとともに、良好な出力特性を得ることが可能な角度検出器を提供する。
【解決手段】単一で平板の略円弧形状の磁性体4aと、磁性体4aの両端部4a1に接触する一対の磁石4bと、磁性体4aと磁石4bとを備えるとともに操作手段の操作量に応じて回動する回動部材4と、回動部材4の回動に伴う磁性体4aの漏洩磁界の変化を検出する磁気検出部5とを備えた角度検出器1において、磁性体4aに漏洩磁界の漏れ量を調整する漏洩磁界調整部4a3を設けたものである。
(もっと読む)
移動可能な強磁性要素を利用する改良された位置センサ
角度センサ
【課題】高精度の角度センサを低コストで提供する。
【解決手段】角度センサ(10)は、回転軸(21)の軸芯方向に対して斜向する主面(22A,22B)を有し、回転軸(21)の軸芯回りの回転に連動して回転するロータ(22)と、ロータ(22)の回転時に生じるロータ(22)の面ブレに伴い磁界強度及び磁界方向が周期的に変化する磁界を検出し、回転軸(21)の回転角の情報を含む検出信号を出力する磁気センサ(30)と、検出信号に基づいて回転軸(21)の回転角を算出する信号処理回路(40)を備える。
(もっと読む)
角度センサ
【課題】高精度の角度センサを提供する。
【解決手段】角度センサ11は、螺旋状に巻回する転動溝31を有し、回転軸20の回転に連動して回転するロータ30と、転動溝31を転動する転動体40と、転動体40の位置と回転軸20の回転角とが一対一に対応付けられるように転動体40の移動方向を案内する案内部材60と、転動体40の位置に応じて変化する磁界を検出し、転動体40の位置に応じた検出信号を出力する磁気センサ50と、検出信号に基づいて回転軸20の回転角を演算する信号処理回路80を備える。
(もっと読む)
角度センサ
【課題】回転軸の回転に連動して回転するロータに面ブレが生じたとしても、回転軸の回転角を正確に検出できる角度センサを提供する。
【解決手段】角度センサ11は、ステアリングシャフト20の回転に連動して回転するロータ30を備える。ロータ30の第一の主面30A及びその裏面である第二の主面30Bの間の肉厚d0は、肉厚d0と軸芯回りの角度とが一対一に対応付けられるように形成されている。磁気センサ41は、磁気センサ41と第一の主面30Aとの間の距離の情報を含む第一の検出信号を出力する。磁気センサ42は、磁気センサ42と第二の主面30Bとの間の距離の情報を含む第二の検出信号を出力する。加算器51は、第一及び第二の検出信号を加算して得られる和信号を出力する。信号処理回路53は、和信号に基づいてステアリングシャフト20の回転角を演算する。
(もっと読む)
整流子付き電気駆動装置および整流子付き電気モータの制御方法
本発明による整流子付き電気駆動装置には、センサ装置(1)を備えた電気モータが設けられており、このセンサ装置は、電気モータの軸(10)上に設けられた永久磁石(5)と、この永久磁石(5)に対向して電気モータのステータに位置固定されたアナログホールセンサ(11,12,14,16)を有している。さらに本発明によれば、電気モータの巻線を制御する制御装置が設けられており、この制御装置は、軸の回転に関してホールセンサにより測定された、永久磁石(5)の磁界を表す較正ホール信号を記憶する記憶装置を有している。制御装置は、ホールセンサ(11,12,14,16)により測定された、永久磁石(5)の実際の磁界を表す実際のホール信号を、較正ホール信号と比較する装置を有している。これにより温度や経年変化の作用を識別し、ロータポジションの特定にあたり考慮することができる。  (もっと読む)
(もっと読む)
近接センサ
【課題】バイアス磁石に対する磁気抵抗効果センサの設置位置がずれたとしても被検出体の検出誤差が抑制される磁気式の近接センサを提供する。
【解決手段】近接センサは、被検出体に設けられる磁性体と、左右に伸びる腕部分40aとその中央部分から被検出体側へ腕部分40aに対し直交して延出する足部分40bとからT字形状をなすバイアス磁石40と、磁気抵抗素子が設けられ、バイアス磁石40と磁性体とにより印加されるバイアス磁界の磁気ベクトルの向きに応じて同磁気抵抗素子の抵抗値が変化することで出力電圧が変化するとともに、磁性体がバイアス磁石40に近接しない状態においてバイアス磁石40により印加されるバイアス磁界の磁気ベクトルが同一方向を向く範囲に配置位置が設定される第1MRセンサ41及び第2MRセンサ42とを備える。近接センサは、第1MRセンサ41及び第2MRセンサ42からの出力に基づいて被検出体の変位を検出する。
(もっと読む)
回転角度検出装置
【課題】磁性移動体の移動位置に対する磁気センサの出力特性の直線性を高め、被検出部の回転角度の検出精度の高い回転角度検出装置を提供する。
【解決手段】回転角度検出装置1は、軟磁性体からなる第1ロータ11および第2ロータ12、磁気センサとしてのホールIC13とそれを保持固定するセンサ固定ステータ14、磁石固定ステータ15とその一箇所に保持固定される磁石16を備える。磁石固定ステータ15は、磁石16の両側に第1ヨーク17および第2ヨーク18を有する。第1ロータ11と第2ロータ12とが、ともに被検出部に固定されて一体で回転する。第1ロータ11の外壁面41と第1ヨーク17または第2ヨーク18との対向面積に応じてホールIC13にて検出される磁束が変化する。エアギャップG12とエアギャップG22とが互いにギャップ長さの増減を補い、位置ズレによる磁束密度の偏りが相殺され、ホールICの出力ズレが低減される。
(もっと読む)
磁気軸受変位検出方法及び検出装置
【課題】磁気軸受変位測定装置において、渦電流に伴う検出精度の低下及び熱的問題を解決する。
【解決手段】磁気軸受4に非接触支持される回転体21の主軸1の両端に対向して永久磁石15を備え、回転体21の両端付近の側面に離間して位置検出センサ3を備える。そして、位置検出センサ3が、永久磁石15の静止磁場を検出することにより、回転体21の変位を検出する回転子位置検出方法である。永久磁石15及び位置検出センサ3を回転体21の主軸1の両端付近に主軸1を介して対称に備えることにより、回転体21のアキシャル方向の変位も検出できる。静止磁場を利用しているため、キャン7上又はターゲット5上での渦電流の発生を抑制する。特に、金属製のキャン7を備える場合においては、渦電流による位置検出精度の低下及び発熱の問題を解消する。
(もっと読む)
磁気式位置センサ
【課題】測定対象物の変位方向の自由度が高く、より多様で高精度の位置測定が可能になる磁気式位置センサを提供する。
【解決手段】磁気式位置センサは、検出ギャップ7を挟んでX方向に沿って並設された一対の固定コア1a,1bを含む固定磁性部材1と、原点ギャップ5を挟んでX方向に沿って並設された一対の可動コア2a,2bを含み、X方向に変位可能で、かつX軸回りに回転可能に支持された可動磁性部材2と、固定コア1aおよび可動コア2aを通過する第1の磁束ループLa、ならびに固定コア1bおよび可動コア2bを通過する第2の磁束ループLbをそれぞれ生成するための磁界発生部材4と、固定コア1a,1b間で漏洩する磁束を検出するための磁気検出素子6などで構成される。
(もっと読む)
回転角検出装置
【課題】回転軸2と一体的に回転する回転体3により磁気回路の一部を構成するとともに、回転軸2の回転角に応じて変化する磁束を検出する回転角検出装置1において、回転体3の位置ずれに伴う検出精度の低下を抑制する。
【解決手段】回転体3の軸方向両側に第1、第2固定体5、6を固定し、回転体3と第1、第2固定体5、6との間に第1、第2の軸方向エアギャップa1、a2を形成する。また、回転体3に、第1固定体5の外周側で軸方向一方側に膨出して第1固定体5と径方向に対向する軸方向膨出部13を設け、軸方向膨出部13と第1固定体5との間で径方向エアギャップbを形成する。これにより、回転体3が軸方向または径方向のいずれの方向に位置ずれしても、回転角の検出精度に大きな変動が発生しなくなり、検出精度の低下が抑制される。
(もっと読む)
変位検出装置
【課題】 磁性移動体1がそのストローク方向に対して垂直な方向に位置ズレした場合であっても、磁気センサ2の出力ズレの影響を抑制することを課題とする。
【解決手段】 磁性固定体には、磁気センサ2の中心部を通る対称軸線を中心にして対称的な形状となるように、コの字状の断面を有する第1、第2分割ブロック6、7が配置されている。そして、磁性移動体1の第1端面と磁気センサ2との間には第1エアギャップ(G1)が形成され、また、磁性移動体1の第2端面と第1、第2分割ブロック6、7の各対向部13、14との間には第2エアギャップ(G2)が形成されている。これによって、仮に磁性移動体1がそのストローク方向に対して垂直な方向に位置ズレした場合であっても、第1エアギャップ(G1)と第2エアギャップ(G2)とが互いにギャップ長の増減を補い合うため、磁気センサ2の出力ズレの影響を抑制することができる。
(もっと読む)
ポジションセンサ
【課題】所定範囲内における検出コイルに対するコアの相対変位に対して出力信号を一定値とすることができるポジションセンサを提供することにある。
【解決手段】ポジションセンサは、磁性材料からなるコアが巻軸方向に相対変位する形に配置された検出コイル10を有した位置検出部1と、検出コイル10の両端間の電圧よりなる検出電圧に基づいて検出コイル10に対するコアの位置に対応する値の出力信号を出力する処理装置2と、位置検出部1の検出コイル10に位置検出用の電流を供給する電流供給部3とを備え、処理装置2は、出力信号を出力するにあたっては、位置検出部1より得た検出電圧に対応する出力信号の値を、当該出力信号の出力特性が、検出電圧に対して出力信号の値が単調増加する単調増加領域を両端に有するとともに、単調増加領域間に検出電圧に対して出力信号の値が一定値となる不変領域を有する値に設定する出力調整処理を行う。
(もっと読む)
位置検出器
【課題】 操作手段の回動角と出力電圧との出力特性においてリニアリティを確保することが可能な位置検出器の提供する。
【解決手段】 磁気ヘッドは、対向面を有する一対の磁性体4間に一対の磁石5を配設し、前記一対の磁性体4と前記一対の磁石5とで閉磁気回路を形成してなる。移動部材3は、操作手段の操作量に応じて前記磁気ヘッドを移動させる。磁気検出体6は、磁気ヘッドにおける閉磁気回路の内部に配設され、移動部材3の移動に伴い閉磁気回路の内部に生じる漏洩磁界の変化を検出する。一対の磁性体4は、幅が漸次異なる部分を有する。
(もっと読む)
1 - 20 / 62
[ Back to top ]