
Fターム[2F077QQ15]の内容
感知要素の出力の伝達及び変換 (32,270) | スケール(パルス)の読取 (1,628) | 絶対値検出手段を持つもの (221)
Fターム[2F077QQ15]に分類される特許
1 - 20 / 221
回転角度検出装置
多回転アブソリュート回転角検出装置及びアブソリュート回転角を検出する方法
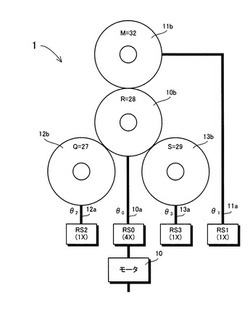
【課題】主軸の回転角度検出方法で、広い多回転検出範囲を得られ、かつ、高い検出精度を達成することのできるアブソリュート回転角検出方法と、多回転アブソリュート回転角検出装置を提供する。
【解決手段】本検出装置は、主軸ギヤ10bと歯車接合した第1〜第3副軸ギヤを具備する歯車機構1からなり、主軸ギヤと第1副軸ギヤの歯数差は、2又はそれを越える整数aであり、また主軸ギヤと第2副軸ギヤの歯数差は、1であり、第1軸の歯数は主軸に対する歯数差と主軸検出器の軸倍角の積の整数倍の関係を有する。各軸の回転角を角度検出器RS0〜RS3で検出する。主軸の回転角度と、主軸と第1〜第3副軸との間の回転角度の差を表す周期信号値をそれぞれ生成し、各周期信号値から求められた第1〜第3副軸の相対回転数の組み合わせに基づいて主軸の回転数を求める。主軸の回転数に回転角度を加えて多回転アブソリュート回転角を得ることができる。
(もっと読む)
エンコーダおよびこれを備えた装置

【課題】エンコーダにおいて、三角関数演算の回数を削減する。
【解決手段】エンコーダは、周期パターン11が設けられたスケール10と、スケールとの相対移動が可能であり、周期パターンを読み取って、それぞれ周期パターンに応じた変化周期を有し、かつ互いに位相が異なる複数のアナログ信号を出力するセンサ20と、該センサから出力された複数のアナログ信号を時分割でアナログ−デジタル変換して複数のデジタル信号を生成するA/D変換部30と、複数のデジタル信号から位相を検出する位相検出部60と、スケールとセンサとの相対移動速度と位相検出部により検出された位相とを用いて補正値を算出し、該補正値と位相検出部により検出された位相とから補正位相を算出する補正部70と、該補正位相を用いて、スケールとセンサとの相対移動方向での位置を求める位置検出部80とを有する。
(もっと読む)
エンコーダ装置及びエンコーダ装置の回転情報検出方法
【課題】外部バッテリを用いずに、多回転情報を得ることができるエンコーダシステム及び信号処理方法を提供すること。
【解決手段】所定の回転軸を中心として回転する回転部と、当該回転部の第一回転情報を検出する第一検出部と、当該第一検出部とは別に回転部の第二回転情報を検出する第二検出部と、第一検出部又は第二検出部における検出結果の異常の有無を検出する制御部とを備える。
(もっと読む)
線形位置測定システム
【課題】夫々位置マーキングを有し、複数の個別レールに従って夫々設置されている複数の測定スケールと、台車が案内される夫々の個別レールに関連する台車の夫々の位置を決定することを可能にする。
【解決手段】複数の個別レール12’、12’’、12’’’と台車に固定され、位置マーキングをスキャンするように設計された少なくとも1つのスキャナとを有する台車が案内される複数の個別レール12’、12’’、12’’’を線形上に有するスライドレール10に関連する台車の位置を決定するための線形位置測定システムにおいて、全ての複数の個別レール12’、12’’、12’’’の位置マーキングは、夫々複数の測定スケールで同様に配置される。情報の断片は、台車が案内される各々の個別レールで収集されるために別々の個別コード24’、24’’、24’’’が個別レール12’、12’’、12’’’に設けられ、スキャナによってスキャンされる。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を高精度に計算する方法を提供する。
【解決手段】本発明に係る計算方法を用いる回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たすギア機構において、第1回転軸の多回転回転角を第1回転軸の回転角度である第1回転軸の検出値p1と第1回転軸の回転数に対応するR0×m0+R1×m1+・・・Rn−2×mn−2とに展開し、各軸の角度検出器の検出値に基づいて係数R0〜Rn−2を求め、第1回転軸の多回転回転角を計算する。第2回転軸以降の角度検出器で生じた検出誤差を有効に抑圧することができ、高精度な多回転回転角を計算することができる。また、複数系列のギア機構を並列に設け、それらのギア機構から得られる検出値に基づき、より広い回転角検出範囲を達成することができる。
(もっと読む)
VR型レゾルバおよび角度検出システム
【課題】軸倍角が3X以上のVR型レゾルバにおいて、角度検出の精度が高く、ゼロ点を検出することが可能で、更にゼロ点検出用の巻線を別途用意しなくてよい構成を提供する。
【解決手段】軸倍角が3XのVR型レゾルバにおいて、ロータコア104の構造をラジアル方向に突出した磁極104a,104b、ラジアル方向に突出していない磁極104cを備えた構造とする。また、突極102cと102eとに巻回されたcos検出巻線の巻回部分を繋ぐ配線の途中からゼロ点検出端子を引き出す。ゼロ点検出端子に現れる電圧波形に閾値を設けることで、ロータコア104の絶対角の検出が可能となる。
(もっと読む)
位置検出装置
【課題】シンプルな構成で小型化が容易な位置検出装置を実現する。
【解決手段】磁気レゾルバの検出信号をもとにモータの回転位置を検出する位置検出装置において、
前記モータの回転中心軸を中心とした円環状に配置され、それぞれに回転位置の検出コイルが巻回された複数の歯が形成されたレゾルバステータと、
このレゾルバステータに対向するとともに前記回転中心軸から偏心した円環状に配置されたn個(nは2以上の整数)の歯を有するレゾルバロータと、
前記検出信号の信号振幅および位相に基づいて前記モータの絶対回転位置を算出する演算部と、
を備える。
(もっと読む)
エンコーダ並びにスケール及びスケールを製造するための方法
【課題】
本発明は、電磁誘導式に走査可能なスケール1を有するエンコーダに関する。当該エンコーダは、スケール1の目盛要素12を走査するための走査ユニット2を有する。このため、走査ユニット2は、交番電磁場を生成するための励磁ユニット21と目盛要素12によって位置に依存して変調された交番電磁場を検出するための検出ユニット22とを有する。
【解決手段】
スケール1は、特に冷間圧延ボンドによって提供される層スタック10から構成される。当該層スタックは、スケール1の機械的な特性を主導して決定する基板103と、高い透磁率を有する強磁性材料から成るキャリア層102と、このキャリア層102上に存在して目盛要素12を形成している、良好な電気伝導性の材料から成る目盛層101とを有する。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、モータ装置及びロボット装置を提供すること。
【解決手段】磁気パターンを有する単一部材として形成され、光学パターンを有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置
【課題】小型化が可能な位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置を提供すること。
【解決手段】光学パターンを介した光を検出する光検出部が実装された第一チップと、当該第一チップとの間で互いに表面を対向させた状態で接合され、磁気パターンによる磁場を検出する磁場検出部が実装された第二チップとを備える。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び、第一部材のうち光の入射面側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置
【課題】小型化が可能な位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置を提供する。
【解決手段】光学パターンを介した光を検出する光検出部20と、磁気パターンによる磁場を検出する磁性薄膜をそれぞれ有す第1検出部31と第2検出部32からなる磁場検出部30とを備え、光検出部20と磁場検出部30とは、同一のチップ基板10に第1検出部31と第2検出部32が光検出部20を挟む位置に配置されている。
(もっと読む)
アブソリュートエンコーダ装置及びモータ
【課題】組み付けが容易であり高分解能を達成する小型のアブソリュートエンコーダ装置を提供することを目的とする。
【解決手段】本発明は、第1の磁気パターン14(2極)と第2の磁気パターン16(多極)とを有する永久磁石4と、第1の磁気パターン14の磁界を検出する第1の磁気センサ5と、第2の磁気パターン16の磁界を検出する第2の磁気センサ6と、第1及び第2の磁気センサ5,6の出力信号から、回転軸2の絶対的な回転角度を算出する信号処理回路7とを備えるエンコーダ装置1であり、第1及び第2の磁気センサ5,6と信号処理回路7は単一基板8に固定され、第1の磁気パターン14は永久磁石4の内側において軸方向と交わる方向に延びる面上に形成され、第2の磁気パターン16は永久磁石4の外周面に形成される。
(もっと読む)
角度検出装置
【課題】故障に対する冗長性が高く、絶対角度の検出を高い精度で行える技術を提供する。
【解決手段】シャフト103にVRレゾルバ120とMRセンサ114を取付け、両者の軸倍角を2以上とし、且つ、両者の軸倍角の差を1とする。VRレゾルバ120の出力から算出される角度とMRセンサ114の出力から得られる角度の差からシャフト103の絶対角が算出される。ここで、VRレゾルバとMRセンサ114の故障モードが異なるので、故障に対する冗長性を確保することができる。
(もっと読む)
移動体の絶対値型位置検出装置
【課題】長い距離に亘って移動体の絶対位置を正確に検出可能で低コストの移動体の絶対値型位置検出装置を提供する。
【解決手段】移動体の絶対位置を特定する絶対値特定パターンが記録されている絶対位置特定スケール10と、スケールの絶対位置を検出する検出手段と、からなる移動体の絶対値型位置検出装置1であって、スケール10の隣接するスケールは順次その一部が重なるように所定のオーバーラップ量を保持して直列に配置され、検出手段はスケール毎に各々配置されており、オーバーラップ量の絶対位置および各スケールのオーバーラップ内の特定位置を記憶しておく不揮発性記憶部31と、検出手段によるスケールの絶対位置の検出結果と不揮発性記憶部31に記憶されている情報から移動体の絶対位置を演算する演算部30とを備えた。
(もっと読む)
リニアセンサ
【課題】リニア方向の絶対位置を特定するスケールを直列に配置して長い距離の絶対位置を正確に検出可能で組立性にも優れたリニアセンサを提供する。
【解決手段】移動体の絶対位置を特定するために複数直列に配置された移動体絶対位置特定スケールからなる長尺スケールと、長尺スケールの何れの移動体絶対位置特定スケールに移動体が存在するかを特定する移動体存在領域識別スケールと、各移動体絶対位置特定スケールにおける移動体の絶対位置を検出する移動体絶対位置検出手段と、何れの移動体存在領域識別スケールに移動体が存在するかを特定する移動体存在領域識別手段と、を備え、長尺スケールと移動体存在領域識別スケールがそれぞれ並列に配置されており、各移動体絶対位置特定スケールの連結部付近において、移動体存在領域識別手段が移動体存在領域識別スケールを読取る位置を所定量だけずらす。
(もっと読む)
ロータリーエンコーダー、およびモーター
【課題】小型化の可能なアブソリュート方式のロータリーエンコーダーを提供する。
【解決手段】回転位置検出用の目印を設けた回転ディスクを回転軸とともに回転させ、回
転に伴って目印が移動する経路上に複数の検出素子を設けておく。そして、回転ディスク
が回転した時に、複数の検出素子の中の何れの素子で目印が検出されたかに基づいて回転
位置を検出する。こうすれば、回転ディスク上には、回転位置検出用の目印を設けるだけ
でよい。また、複数の検出素子は目印の移動経路に沿って設ければよいので、複数の検出
素子を設けてもロータリーエンコーダーが大径化することがない。その結果、アブソリュ
ート方式のロータリーエンコーダーを十分に小型化することが可能となる。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を検出することのできる装置を提供する。
【解決手段】本発明に係る回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たす機構を実現する実施例として、回転角検出装置は、第1回転軸から第n回転軸の隣接する回転軸間で、歯数(m±1)のギアが歯数mのギアと噛み合うギア機構が形成される。
(もっと読む)
回転センサ
【課題】部品の寸法公差の累積に基づく寸法誤差や組付公差の影響、長年の使用による部品の変形による影響を受けることなく第1の回転体の回転数に対応する第2の回転体の回転角度を正確に検出する。
【解決手段】被測定回転体11に取り付けられこの回転と共に回転する第1の回転体10と、第1の回転体の回転角度を所定の角度範囲ごとに検出する第1の検出手段100と、第1の回転体と機構的に連結しこれと連動して回転し、かつ第1の回転体の回転数よりも減速した回転数で回転する第2の回転体20と、第2の回転体を所定の角度範囲ごとに検出する第2の検出手段200と、を有し、第1の回転体の回転角度を検出するときに、第1の検出手段の出力値が初期値付近の値であるか、終端値付近の値であるかを判断し、第1の検出手段の出力値から第2の検出手段の出力値に判断結果に応じた所定の補正処理を行う。
(もっと読む)
1 - 20 / 221
[ Back to top ]