
Fターム[2F077RR29]の内容
感知要素の出力の伝達及び変換 (32,270) | 符号の読取 (349) | 複数種類のパルスパターンを持つもの (30)
Fターム[2F077RR29]に分類される特許
1 - 20 / 30
多回転アブソリュート回転角検出装置
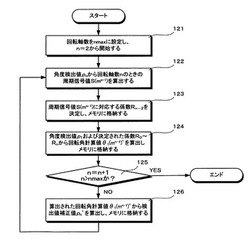
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を高精度に計算する方法を提供する。
【解決手段】本発明に係る計算方法を用いる回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たすギア機構において、第1回転軸の多回転回転角を第1回転軸の回転角度である第1回転軸の検出値p1と第1回転軸の回転数に対応するR0×m0+R1×m1+・・・Rn−2×mn−2とに展開し、各軸の角度検出器の検出値に基づいて係数R0〜Rn−2を求め、第1回転軸の多回転回転角を計算する。第2回転軸以降の角度検出器で生じた検出誤差を有効に抑圧することができ、高精度な多回転回転角を計算することができる。また、複数系列のギア機構を並列に設け、それらのギア機構から得られる検出値に基づき、より広い回転角検出範囲を達成することができる。
(もっと読む)
エンコーダ

【課題】高精度なスケールの位置検出をすること
【解決手段】エンコーダにおいて、パターン列は、移動方向であるX方向に垂直なY方向に周期的に配列されたX方向に第1の変調周期P1と第2の変調周期P2を有する。信号処理手段30は、受光素子アレイの出力からピッチP1の位相を取得する第1の位相取得手段32を有する。エンコーダは、領域23を検出する複数の受光素子17Aの出力信号に対して受光素子アレイ上の位置に応じた重みを使用して重み付けをし、重みは、第1の位相取得手段の空間周波数応答のピッチP2に対応する空間周波数を含む所定の範囲において、重み付け有の値が重み付け無の値以下となるように設定されている。
(もっと読む)
エンコーダ
【課題】小型かつ高精度な位置検出が可能なエンコーダを提供すること
【解決手段】エンコーダにおいて、スケール20のパターン列はX方向に垂直なY方向に周期的に配列され、X方向にそれぞれ異なるピッチを有する複数の領域23A、25Aを有し、領域25Aのエネルギー分布の振幅がスケールのX方向の位置に従って変化するように構成されている。エンコーダは、受光素子アレイ16Aの出力信号からそれぞれ対応する領域の振幅を取得する第1、第2の振幅取得手段37、38と、第1、第2の振幅取得手段37、38が取得した複数の領域の2つの振幅の比で表される振幅信号S_ampをスケールの絶対位置を表す絶対位置信号として取得する位置情報取得手段34と、を有する。
(もっと読む)
リニアセンサ
【課題】リニア方向の絶対位置を特定するスケールを直列に配置して長い距離の絶対位置を正確に検出可能で組立性にも優れたリニアセンサを提供する。
【解決手段】移動体の絶対位置を特定するために複数直列に配置された移動体絶対位置特定スケールからなる長尺スケールと、長尺スケールの何れの移動体絶対位置特定スケールに移動体が存在するかを特定する移動体存在領域識別スケールと、各移動体絶対位置特定スケールにおける移動体の絶対位置を検出する移動体絶対位置検出手段と、何れの移動体存在領域識別スケールに移動体が存在するかを特定する移動体存在領域識別手段と、を備え、長尺スケールと移動体存在領域識別スケールがそれぞれ並列に配置されており、各移動体絶対位置特定スケールの連結部付近において、移動体存在領域識別手段が移動体存在領域識別スケールを読取る位置を所定量だけずらす。
(もっと読む)
移動体の絶対位置検出装置
【課題】電源遮断後の再復帰時に移動体が再び元の状態から移動するまでの時間を短くしつつ、移動体自体の移動距離を低コストで従来に比べてかなり長くできる移動体の絶対位置検出装置を提供する。
【解決手段】移動体の絶対位置を特定する絶対値特定パターンが記録されている絶対位置特定スケール11と、移動体の絶対位置を特定しない絶対値不特定パターンが記録されている絶対位置不特定スケール12と、移動体が絶対位置不特定スケールに対応する領域から絶対位置特定スケールに対応する領域に到達したことを検出するガイドパターンが記録されている前記絶対値不特定スケールの少なくとも一部をなすガイドスケール13と、これらのスケールに記録された各パターンを検出する検出器51と、を備えている。
(もっと読む)
エンコーダ及びエンコーダの位置検出方法
【課題】位置情報の検出精度を高めることができる。
【解決手段】識別符号の基本間隔と同じ間隔の第1パターンを1周期含む第1の符号と前記基本間隔の半分の間隔の第2パターンを2周期含む第2の符号とを有する符号板(10)と、前記第1の符号と前記第2の符号とを検出して検出信号を出力する検出部(30)と、前記検出信号に基づいて、前記符号板(10)の位置を示す位置情報を生成する位置情報生成部(90)と、を備える。
(もっと読む)
長さ又は角度の絶対値の測定方法
【課題】構造が簡単であり、しかも測定対象の長さにできるだけ依存しない絶対式測定装置を提供する。
【解決手段】読み取りヘッド14及び測度形成体12を備え、測度形成体12が少なくとも1つの部分要素を備え、各部分要素が連続配列内の他の部分要素を接続するための接続部を有する。部分要素が、部分要素上における読み取りヘッド14の位置を能動的に決定するための制御ユニット及び記憶素子を備え、記憶素子に測度形成体12内における部分要素自身の位置情報を保存する。
(もっと読む)
エンコーダ装置
【課題】符号板の回転数が高くなった場合でも適切に誤動作を検出することができるエンコーダ装置を提供することを目的としている。
【解決手段】最小識別幅λの第1アブソリュートパターン及び該第1アブソリュートパターンとは異なる最小識別幅の第2アブソリュートパターンを有する符号板と、第1アブソリュートパターンに沿って配置された第1アブソリュートパターンの符号を検出する複数の検出素子を有する第1アブソリュートパターン検出部と、第2アブソリュートパターンに沿って配置された第2アブソリュートパターンの符号を検出する第2アブソリュートパターン検出部と、第1アブソリュートパターン検出部が検出した第1アブソリュートパターンの符号に基づき現在位置を算出する絶対位置デコード部と、少なくとも第2アブソリュートパターンの符号に基づき異常検出を行う異常検出部とを備える。
(もっと読む)
位置検出装置
【課題】識別数を増やした場合にも大型化を抑え、かつ誤検出を確実に防止すること。
【解決手段】顕微鏡本体20に配設した検出部31と、レボルバ10に配設した複数の被検出部40a,40bとを備え、検出部31が検出した被検出部40a,40bの検出結果に基づいて顕微鏡本体20に対するレボルバ10の回転位置を判別する装置であって、検出部31は、被検出部40a,40bに対する相対的な移動軌跡が共通の円弧となる位置に、相互に検出条件が異なる位置規定用検出部31A及び判別用検出部31Bを配設して構成したものであり、複数の被検出部40a,40bは、それぞれ位置規定用検出部31Aが検出対象とする位置規定用被検出部と、判別用検出部31Bが検出対象とする判別用被検出部とを有し、位置規定用検出部31Aが位置規定用被検出部を検出した際に判別用検出部31Bによって検出可能となる位置に判別用被検出部を配設した。
(もっと読む)
エンコーダ
【課題】磁石部の径に関係なく、所定の形状の磁石を用いることができるエンコーダを提供する。
【解決手段】磁気パターンが形成され回転軸(AR)を中心として回転する磁石部(4)と、磁石部による磁場を検出する検出部(6a,6b)とを備え、磁石部は、回転軸を中心とする円周(C)に沿って配置された複数の単位磁石(4a)により構成され、単位磁石は、円周の内周側と外周側との間で径方向の磁場を形成し、円周の一周に亘って少なくとも一回は磁場を変化させるように配置されていることを特徴とする。
(もっと読む)
リニアエンコーダ
【課題】 電源投入時の立ち上がり時間を短縮させることが可能なリニアエンコーダを提供すること。
【解決手段】 リニアスケールには、位置情報としてインクリメント位置を示す複数の情報を所定ピッチで記録したインクリメント指標部と、インクリメント位置とは別の基準点位置を示す複数の情報を所定ピッチで記録した基準点位置指標部と、インクリメント位置及び基準点位置とは別の位置情報を持つアブソ信号を記録したアブソ指標部とが設けられ、隣接する任意の基準点位置間に含まれるアブソ信号の組み合わせが他の基準点位置間に含まれるアブソ信号の組み合わせの何れとも異なるように設定され、信号処理部は上記検出ヘッドの検出素子からの検出信号に基づいてアブソ信号の組み合わせを読み取り、予め記憶していたテーブルと比較して可動部のリニアスケール上の絶対位置を求めるように構成されているもの。
(もっと読む)
絶対角度符号部及び絶対位置測定装置
絶対角度符号部(1)は、一つのトラックで構成されている。そのトラックでは、第一の符号シーケンス(A)の一つの部分と第二の符号シーケンス(B)の一つの部分が交互に配置されている。これらの符号シーケンス(A,B)は、異なる長さを有し、二つの符号シーケンス(A,B)の長さは、有利には、1だけ異なる。角度符号部(1)の一回転内の絶対位置(POS)を一義的に検出するために、二つの符号シーケンス(A,B)の各々に対して、復号用の専用のテーブル(TA ,TB )を有する復号器(3)が配備されている。それらにより得られた二つの符号シーケンス(A,B)内の部分分割位置(xA ,xB )から、絶対位置(POS)を算出している。  (もっと読む)
(もっと読む)
アブソリュートエンコーダ
【課題】測定対象物及び検出部を小型化し、さらに高精度な検出が可能なアブソリュートエンコーダを提供する。
【解決手段】光学パターン4及び磁気パターン6を形成した回転板3と、光学パターンに光を照射する光源9と、光学パターンを読み取る光学式検出部5と、磁気パターンを読み取る磁気式検出部7とを備えたアブソリュートエンコーダにおいて、回転板の1回転による1周期の信号は、磁気式検出部によって検出する。さらに、磁気式検出部及び光学式検出部からの出力信号により回転板の1回転内の絶対角度を求めかつ磁気式検出部の出力信号により回転板の回転数を求める演算部を備えた。
(もっと読む)
エンコーダ及びこのエンコーダを操作する方法
【課題】停電時のエネルギー消費を低下させた絶対位置測定用エンコーダを提供する。
【解決手段】励磁電流Iが、スイッチ素子2.25を切り替えることによってターンオン期間を有するターンオンパルスで生成されること、及び、前記ターンオンパルスの立ち下りエッジ後の領域内で位置情報を算出するため、第1検出巻線2.221および第2検出巻線2.222内で誘導した少なくとも1つの電圧(U1,U2,U3,U4)が測定される。
(もっと読む)
絶対値型磁気スケール装置
【課題】第1の磁気トラックと第2の磁気トラックとの離間距離が短い場合であっても、第2の磁気トラック上における第1の磁気トラックの磁束の影響を小さくすることができる絶対値型磁気スケール装置を提供すること。
【解決手段】本発明の絶対値型磁気スケール装置1は、磁気スケール2と、検出ヘッド3と、ディテクタ4と、を備えている。磁気スケール2は、非繰り返しコードを表す第1の磁気パターン11aが記録された第1の磁気トラック11と、第1の磁気トラックと所定の間隔をあけて平行に延在され、一定の周期が繰り返される第2の磁気パターンが記録された第2の磁気トラックと、第1の磁気トラックの第2の磁気トラック側に隣接して配置され、第1の磁気パターンと逆の極性となる第3の磁気パターンが記録された第3の磁気トラックとを有する。
(もっと読む)
光電式エンコーダ
【課題】1トラックから複数種類の情報を取得可能とした高精度な光電式エンコーダを提供する。
【解決手段】光電式エンコーダは、スケール12と、スケール12に測定光を照射する光源11と、スケール12で反射又は透過した前記測定光を受光する受光器14と、受光器14の受光信号を処理してスケール12の絶対位置を検出する信号処理回路20とを備える。スケール12は、複数の第1変調スケールパターン3A(k)を配列してなる第1変調インクリメンタルパターン31を有する変調インクリメンタルトラック301を備える。第1変調インクリメンタルパターン31は、測長方向に所定周期Pr内で第1変調スケールパターン3A(k)の形状が周期的に変化するように形成されている。
(もっと読む)
2進および10進の出力を有する絶対位置用磁気エンコーダ
絶対位置用磁気エンコーダは、2進出力に対して構成された第1磁気トラックと、10進出力に対して構成された第2磁気トラックと、上記第1磁気トラックの近傍に位置されて、該第1磁気トラックの磁界を検出する第1磁気センサと、上記第2磁気トラックの近傍に位置されて、該第2磁気トラックの磁界を検出する第2磁気センサとを含む。上記エンコーダは上記2進出力および上記10進出力の内の一方を提供すべく選択的に動作可能である。 (もっと読む)
エンコーダ用のスケール及びエンコーダ
【課題】
本発明のスケール(M)又は本発明のエンコーダの基本原理は、測定方向(X)に対して横にずらした目盛トラック(TS1,TS2)内の基準マーク(R)を、1目盛トラック(TS1,TS2)内の基準マーク(R)の間隔の一部だけずらすことである。
【解決手段】
基準マーク(R)による1目盛トラック(TS1,TS2)の周期性(P)の雑音の悪影響を除去するか又は少なくとも明らかに低減する可能性が提供される。
(もっと読む)
絶対角検出装置
【課題】簡単な信号処理によって回転体の1回転以内の絶対角度を精度よく検出可能な絶対角検出装置を提供する。
【解決手段】回転体Aの回転に連動して回転する回転磁石10の回転角θに応じた磁場変化を検出し、sinθ、cosθ、−sinθ、−cosθの各信号を出力する磁気センサ11を備え、それらの信号から4種類の逆正接信号Va,Vb,Vc,Vdを算出し、各位相においてそれぞれが互いに逆方向にほぼ同じ大きさで揺らぐ信号同士の平均値にあたる第1及び第2の補正逆正接信号V1,V2を求める。さらには、第1及び第2の補正逆正接信号V1,V2が直線上に立ち上がる部分から急激に立ち下がる部分への切り換わり位置(0°、90°、180°などの位置)の前後を利用しない鋸歯状信号を生成し、この鋸歯状信号を用いて回転体の角度検出を行う。
(もっと読む)
エンコーダ
【課題】回転体の絶対角度を精度よく検出可能なエンコーダを提供する。
【解決手段】回転軸10に設けられた磁極部12には複数の磁極部が設けられ、各磁極部は、N極の領域がS極の領域より広い第1磁極タイプと、N極の領域がS極の領域より狭い第2磁極タイプとのいずれかで構成されている。回転体の円周に沿った第1領域内と第2領域内において、第1磁極タイプと第2磁極タイプとの順序列の組み合わせが異なるように構成されている。順序列の組み合わせに基づいて回転体の角度を決定する。
(もっと読む)
1 - 20 / 30
[ Back to top ]