
Fターム[2F077TT53]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | 方向判別 (172) | 2相信号によるもの (119) | 方向信号の発生 (24)
Fターム[2F077TT53]の下位に属するFターム
方向別のカウント信号の発生 (6)
Fターム[2F077TT53]に分類される特許
1 - 18 / 18
ブラシレスDCモータの回転子位置検出方法とその装置
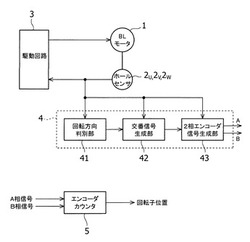
【課題】 3つのホールセンサの信号出力とパルス交番信号の、合計4つの信号の値から、2相エンコーダの出力に相当する信号を生成することによって、モータ回転子の回転方向を判別することができるブラシレスDCモータの回転子位置検出方法とその装置を提供する。
【解決手段】 3つのホールセンサ2U,2V,2W信号の現在値と、その1つ前の値とから、前記回転子の回転方向を判別し、前記3つのホールセンサ2U,2V,2Wのうち、いずれか1つの立ち上がりエッジまたは、立ち下がりエッジを基準位置とし、かつ、この基準位置として立ち上がりエッジを選択するか、あるいは、立ち下がりエッジを選択するかは、前記回転子の回転方向によって決定して、前記基準位置を通過する度に交番する交番信号を生成し、前記3つのホールセンサ2U,2V,2Wの信号と、前記交番信号とから、2相エンコーダ出力相当のパルス信号を生成し、このパルス信号によって前記回転子位置を検出する方法。
(もっと読む)
回転運動または周回運動を検出する運動検出装置

【課題】被検出体の回転数等の計数を行う無電源の運動検出装置において、被検出体の回転数等の検出の正確性を損なうことなく、運動検出装置の小型化、軽量化、低コスト化を図る。
【解決手段】回転運動する可動部13の外周部にスタンバイ磁石15、17およびアウトプット磁石16を周方向に間隔Daをもって設け、可動部13の周囲に磁気センサ1、2、3を間隔Daよりも大きい間隔Dbをもって設ける。回転軸150の回転に伴い可動部13が回転する間、スタンバイ磁石15、17が磁気センサ1、2、3のうちのいずれかの磁気センサの近傍を通過すると、当該磁気センサがスタンバイ状態となり、スタンバイ状態となった磁気センサの近傍をアウトプット磁石16が通過すると、当該磁気センサの磁性素子21において大バルクハウゼン効果が生じ、コイル22から検出信号が出力される。この検出信号に基づいて回転軸150の回転数を計数する。
(もっと読む)
回転検出装置
【課題】第1センサ部の出力信号が所定レベルから変化しなくなる異常が生じている場合であれ、回転体の回転角度の変化量を的確に把握することができる。
【解決手段】クランクポジションセンサ42はクランクシャフト31が所定角度回転する毎にパルス状の信号を出力するメインセンサ61、サブセンサ62を有し、これらは互いに位相のずれた信号を出力する。サブ信号がハイレベルであり且つメイン信号が変化したとの条件が成立したときにこのときのメイン信号の変化方向に応じて異なるパルス幅のクランク信号を出力する。ECU41は、サブ信号がハイレベルから変化しなくなる異常が生じているか否かを判定し、同異常が生じている旨判定された場合にクランク信号のパルス幅と機関回転速度と上記異常時に出力されるクランク信号数との対応関係に基づき当該出力されるクランク信号数を正常時におけるクランク信号数に換算する。
(もっと読む)
センサ電圧の処理回路
【課題】センサ電圧処理回路のオフセット電圧と増幅率を短時間で調整する。
【解決手段】
センサ電圧処理回路100は、オフセット電圧を基準にしてセンサ電圧を増幅した電圧を出力するともにオフセット電圧と増幅率が調整可能な増幅回路120と、増幅回路120の出力電圧の極値を保存する極値保存回路160と、極値保存回路が保存している極値に基づいて増幅回路の出力電圧を2値化する2値化回路200と、調整回路400を備えている。調整回路400は初期化処理時に、1)増幅率を最大値に設定し、2)増幅回路の出力電圧が増幅回路の動作電圧範囲の中間帯に入るようなオフセット電圧に調整し、3)極値を中間帯内の電圧とし、4)増幅回路の出力電圧の極値からの変化幅が所定幅を超えた時に増幅率を低減するとともに極値を補正し、5)増幅回路の出力電圧が回転体の回転運動に固有な変化パターンを示すまで前記(4)の処理を繰り返す。
(もっと読む)
回転検出装置及び回転検出システム
【課題】エンコーダ等のセンサを設けることなく、回転速度にかかわらず直流モータの回転状態を精度良く検出できるようにすることを目的とする。
【解決手段】モータ2に対し、直流電源3から直流電圧を印加すると共に、重畳部5から交流電圧を印加(重畳)する。モータ2は、各相コイルL1,L2,L3のうち第1相コイルL1と並列にコンデンサC1が接続されており、これによりモータ回路のインピーダンスはモータ2の回転に伴って周期的に変化し、その変化はモータ2に流れる電流の交流成分の振幅変化(重畳部5からの交流電流の振幅変化)として現れる。重畳部5における直流電源3からの直流電流が流入しない直流非流入経路8には電流検出部21が設けられ、この電流検出部21にて検出された交流電流に基づいて回転パルスSpが生成される。そして、この回転パルスSpに基づき、回転角検出部7がモータ2の回転角を検出する。
(もっと読む)
回転検出装置の信号処理装置
【課題】チャタリングが発生した場合であっても、回転体の正しい位置を検出可能な検出信号を出力する回転検出装置の信号処理装置を提供すること。
【解決手段】チャタリング状態の間に、有効エッジによるメインセンサの信号変化が連続して発生した回数が偶数回であった場合、初回の有効エッジによるメインセンサ信号の変化が生じたときのロータの回転方向とは逆の回転方向へロータが回転していることを示す補正パルス信号を出力する。これにより、検出信号によるロータの位置と、実際のロータの位置とを一致させることができ、検出信号によりロータの正しい位置を検出することができるようになる。
(もっと読む)
回転数センサ
【課題】本発明は、回転数を検出することができるとともに、回転方向も検出することができる回転数センサを提供することを目的とするものである。
【解決手段】本発明の回転数センサは、差動増幅回路29からの出力信号を所定の電圧と比較して矩形波信号を出力するコンパレータ30の後段に、このコンパレータ30からの出力信号の立ち上がりおよび立ち下がりを検出して比較する立ち上がり検出手段32、立ち下がり検出手段34およびコンパレータ36等からなる比較手段を設けたものである。
(もっと読む)
アップダウンカウンタ装置
【課題】外部クロックを用いることなく、簡易な回路構成で確実なアップダウンカウントを実現する。
【解決手段】アップダウンカウンタ装置10は、UP/DOWNデコーダ12に入力された2相パルス信号(A),(B)からUP/DOWNステート信号(C)を出力するとともに、2相パルス信号の各変化点に同期したデコーダパルス信号(D)を発生させる。デコーダパルス信号はEXORゲート14で2逓倍され、さらに2倍パルス信号(E)はANDゲート18,20にてUP/DOWNステート信号と論理和されてUPパルス信号(F)とDOWNパルス信号(G)となる。これらをCPU22の内蔵ハードカウンタ22a,22bでそれぞれカウントしておき、一定周期ごとにソフトウェア処理部22cで演算処理を行う。
(もっと読む)
回転検出装置の信号処理回路
【課題】ギヤ歯が形成された回転体(ロータ)の回転位置をより高精度に検出すること。
【解決手段】ロータの正転方向への回転時、山部の先端側エッジによるメインセンサ信号変化を有効エッジによる信号変化、及び山部の後端側エッジによる信号変化を非有効エッジによる信号変化と定める。また、逆転方向への回転時、山部の後端側エッジによる信号変化を有効エッジによる信号変化、及び山部の先端側エッジによる信号変化を非有効エッジによる信号変化と定める。検出信号発生回路10は、ロータの回転方向に係らず、メインセンサ信号の有効エッジによる信号変化に応じて、立ち下がり変化が生じ、非有効エッジによる信号変化に応じて、立ち上がり変化が生じる検出信号を発生させる。ロータが回転方向を変化させたとき、メインセンサ信号の最初の有効エッジによる信号変化に応じて、検出信号に立下り変化が生じることを禁ずることで、ギヤ歯の検出ずれを防止する。
(もっと読む)
エレメントの運動を検出する方法およびセンサ装置
【課題】一義的な回転方向が得られ、しかも高い振動不感性を有するセンサを提供する。
【解決手段】運動方向に依存して設定された測定インターバル中に、回転方向検出回路(ブロック1)の左/右回転運動の信号(ブロック2、3)に応じて測定信号を増大する(ブロック4)か、または低減し(ブロック5)、設定された閾値が上方超過されたのちに運動方向信号を形成(ブロック6、7)する。前記設定された閾値はエレメントの振動に対して不感性を有する値である。
(もっと読む)
回転センサ付軸受
【課題】センサアレイ及び入出力線を付けた回路基板を樹脂環の封止凹部に挿入するのと同時に入出力線を取り出すことを可能とし、かつセンサアレイを封止凹部で高精度に位置決めしながら、しかも封止凹部をコンパクト化する。
【解決手段】樹脂環31に、センサアレイ41、入出力線43の付いた回路基板42を一側面から固定基準面35a上に挿入する封止凹部35を形成し、回路基板42の一端から離してセンサアレイ41を実装し、回路基板42の他端とセンサアレイ41との間に入出力線43を接続し、封止凹部35に回路基板42の一端部が挿入される間隙を固定基準面35aとの間に形成する突出部35bを形成し、封止凹部35の固定基準面35a及び内壁他側端面35cと回路基板42との接触、かつ突出部35bとセンサアレイ41のパッケージの一端との接触により、磁気センサ41a、41bの感磁面がトラック22とラジアル方向に対向させられる封止位置に決まるようにした。
(もっと読む)
電磁誘導式エンコーダ
【課題】短いスケールコイルでオフセットを低減して強い信号強度を得ることができ、ヨー方向の変動にも強い、高精度で且つ低価格な電磁誘導式エンコーダを提供する。
【解決手段】測定方向に沿ってスケール10上に多数配列されたスケールコイル14と、前記スケールに対して測定方向に相対移動自在にグリッド12上に配設された送信コイル24及び受信コイル20とを備え、送信コイルを励磁した時に、スケールコイルを経由して受信コイルで検出される磁束の変化から、スケールとグリッドの相対移動量を検出する電磁誘導式エンコーダにおいて、前記送信コイル、受信コイルとスケールコイルが、スケールの中心に対して対称に複数セット(24A、24B)(20A、20B)(14A、14B)配置されており、スケール中心に関して対称な位置にあるスケールコイルの一方は、他方のスケールコイルに対し、スケールピッチの1/2位相がずれた関係になっている。
(もっと読む)
回転検出装置の信号処理回路
【課題】検出対象の回転に伴って回転する回転体の回転方向を含む正確な回転情報を生成出力することのできる回転検出装置の信号処理回路を提供する。
【解決手段】
位相差補償実体部51は、第1及び第2フィルタ部50a及び50bからそれぞれ出力される第1及び第2フィルタ信号PHA_SOR及びPHB_SORに表れるノイズの影響が互いに異なる旨の判定が可能な所定の位相差補償条件が成立するか否かを判定する。また、位相差補償実体部51は、位相差補償条件が成立するとき、該位相差補償条件の成立直前の第1及び第2位相差補償出力信号PHA_R及びPHB_Rの位相関係と同一の位相関係となるように、第1及び第2位操作補償出力信号PHA_R及びPHB_R間の位相関係を補償する。
(もっと読む)
回転状態検出装置
【課題】回転体の回転方向の切り替わり時点を迅速に検出できる回転体検出装置を提供する。
【解決手段】回転体に対向配置され、その回転に伴い位相の異なる2つの矩形波状の2値化検出信号(21a、22a)を出力する2つのセンサ(21、22)と、一方のセンサの検出信号の立ち上がり/立ち下がり時に他方のセンサの検出信号を観測して、回転体の回転方向を検出する。さらに、回転方向が切り替わった場合に、2つの検出信号(21a、22a)のうちの検出タイミングの早い方を選択して、回転方向の判別結果(det_a)として出力する。
(もっと読む)
ロータリエンコーダの回転方向検出装置
【課題】 ロータリエンコーダの回転方向を検出処理する検出処理回路において使用する入力端子の数を少なくする
【解決手段】 ロータリエンコーダ10から位相の異なる複数の2値信号が入力され、この入力された複数の2値信号を3段階以上の電圧レベルを有する1つの信号に変換するレベル変換回路(抵抗40、41によって構成された回路)と、このレベル変換回路によって変換された信号を入力する入力端子P03を有し、この入力端子P03から入力される信号の電圧レベルの変化に基づいてロータリエンコーダ10の回転方向を検出処理する検出処理回路(MPU20)を備える。
(もっと読む)
回転検出装置
【課題】 耐ノイズ性を損なうことなく回転方向及び回転角度を外部に伝達することができる回転検出装置を提供すること。
【解決手段】 第1の磁気センサ3に接続される波形成形回路5aは、回転体1の回転角度に応じたパルス信号Saを回転方向判定回路6、端子Aなどに出力する。第2の磁気センサ4に接続される波形成形回路5bは、回転体1の回転角度に応じたパルス信号Sbを回転方向判定回路6に出力する。回転方向判定回路6は、パルス信号Sa,Sbに基づいて回転体1の回転方向を判定し、その回転方向を示す方向判定信号Scを出力する。位相反転回路7は、パルス信号Saの位相を反転させ、反転させたパルス信号Sd(パルス信号Saと逆位相)を信号選択回路8へ出力する。信号選択回路8は、方向判定信号Scに基づいてパルス信号Saを有効化して端子Bから出力するか、パルス信号Sdを有効化して端子Bから出力するかを選択する。
(もっと読む)
回転検出装置の信号処理装置
【課題】Z相出力パルスの波形調整を可能とし、後段回路との適応性を高くすることができる回転検出装置の信号処理装置を提供する。
【解決手段】単極及び多極レゾルバ11,12からDDモータ10の回転軸13の回転に応じたアナログ検出信号が得られ、RDコンバータ21はその検出信号をデジタル化しRD出力データとしてCPU22に出力する。CPU22は、RD出力データに基づいて回転軸13の所定回転角毎に同期したパルス(正回転時にはアップパルス、逆回転時にはダウンパルス)を生成する。カウンタ24は、アップパルス又はダウンパルスに基づいて計数を実施し、H側及びL側コンパレータ25,26及びアンド回路27は、そのカウント値が第1及び第2判定値間となる期間においてZ相出力パルスの論理をLからHレベルに反転させる。この第1及び第2判定値は、ユーザにより変更可能となっている。
(もっと読む)
集積磁気抵抗速度および方向センサ
集積回路磁気抵抗速度および方向センサが、その方法およびシステムと共に開示される。説明するセンサには、一般にAMR(異方性磁気抵抗)ブリッジ回路が利用されている。この技術を使用することにより、従来のホール効果素子に基づくセンサと比較すると、エアギャップ性能を大きくすることができる。AMRセンサは、1つまたは複数の磁極を使用して、所望の動程に沿って磁化されたリング磁石または棒磁石を検出することができる。磁石の極数は、アプリケーションの設計に基づいて最適化しなければならない。AMRセンサのAMRブリッジ設計によれば、オフセットが最小化され、最適性能のセンサが得られる。速度および方向情報を得るために、2つのブリッジ回路を互いに近接して配置できる(即ちターゲットおよび所望の性能に基づいてブリッジの正確な位置および形状を決定きる)。シリコン上の同じ場所に配置された集積電子工学上で2つのブリッジ回路の信号を比較できる。これらのブリッジは、通常、オフセットを小さく、および/または除去するために45度回転し、エアギャップ性能が大きいセンサを提供する。  (もっと読む)
(もっと読む)
1 - 18 / 18
[ Back to top ]