
Fターム[2F077TT78]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | カウンタを用いる信号処理 (278) | 時間の検出に用いるもの (20)
Fターム[2F077TT78]に分類される特許
1 - 20 / 20
回転機械用物理量測定装置
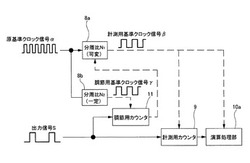
【課題】センサの出力信号Sに含まれるパルスの時間間隔を、計測用カウンタ9のカウント値に基づいて計測し、この計測した時間間隔を利用して回転部材に作用する荷重等の物理量を求める構造に関して、この物理量を測定すべき回転速度範囲が広い場合でも、煩雑な処理を行う事なく、低速回転時に前記計測用カウンタ9のカウント値がオーバーフローする事を防止でき、高速回転時に前記時間間隔の分解能を十分に確保できる構造を実現する。
【解決手段】他の装置を利用して検出した前記回転部材の回転速度を入力するか、或いは、この回転速度を把握する為の調節用カウンタ10を設ける。更に、この回転速度が増減する事に対応して、前記計測用カウンタ9がカウントする計測用基準クロック信号βの周波数を、この回転速度の増減方向と同方向に増減させる機能を追加する。
(もっと読む)
回転角度センサのフェール検知装置

【課題】被検知体に対応する回転角度センサがひとつであっても、回転角度センサのフェールを確実に検知できる回転角度センサのフェール検知装置を提供する。
【解決手段】カム25を、電動モータ1によって一方向に回転駆動されてプッシュロッド35を往復動作するように構成し、角度センサ21の出力電圧Sは、第1の所定電圧V1以下の領域および第1の所定電圧V1より大きい第2の所定電圧V2以上の領域が不感帯Dとして認識する。プッシュロッド35と当接するカム25のカム面を作動面側から非作動面側に移行させる際に、非作動面の所定位置まで一定速度でカム25を回転駆動させる。カム25の非作動面内でかつ所定位置までの間の位置に不感帯Dを配設する。不感帯Dに移行後の経過時間をタイマ54で計測し、不感帯Dの通過予定時間が経過したにもかかわらず不感帯Dに対応する出力電圧Sが検知された場合にフェール状態と判定する。
(もっと読む)
静電容量検出装置
【課題】ノイズ検出用の電極を別途設けることなく、ノイズの有無を検出できる静電容量検出装置を提供する。
【解決手段】静電容量を形成する検出電極100と、検出電極100に電流を供給する電流供給部110と、電流供給部110から検出電極100へ電流を供給する条件を異なる条件に変化させ、それぞれの異なる条件での検出電極100の出力値に基づいて検出電極100に電磁ノイズが印加されたかどうかを判断する制御を行なう制御部200と、を有して静電容量検出装置10を構成する。これにより、別途、ノイズ検出部を設けることなく、静電容量を検出するための検出電極100のみを有し、この検出電極100において静電容量の検出とノイズの有無の検出が可能となる。
(もっと読む)
レゾルバ/デジタル変換器
【課題】処理時間に起因する時間遅れを補償できるレゾルバ/デジタル変換器を提供する。
【解決手段】レゾルバ/デジタル変換器10では、回転位置算出手段11は、回転位置センサから出力されたセンサ値S1、S2が入力されると、所定の処理時間ΔTを要して、センサ値S1、S2に回転位置を求めるための処理を施し、処理結果を第1回転位置θcalcとして出力する。回転位置補正手段12は、第1回転位置θcalcを処理時間ΔT以下の遅延時間ΔT1だけ遅延させた遅延値θdelay1を求め、第1回転位置θcalcと遅延値θdelay1との差分Δθ1を求め、差分Δθ1に処理時間ΔTと遅延時間ΔT1の比に等しい第1補正係数m1を乗算した結果を第1回転位置θcalcに加算して第2回転位置θcompを求め、第2回転位置θcompを回転位置として出力する。
(もっと読む)
回転角検出装置
【課題】高速回転する回転軸であっても、回転バランスの崩れを懸念することなく静止時の絶対的な角度又は角度範囲を高精度に検出する。
【解決手段】回転軸2の静止時の絶対的な角度又は角度範囲を検出する磁気式の回転角検出装置1であって、回転角に応じて磁気的な特性が変化するように回転軸2の表面に周方向に沿って成膜される薄膜パターン3と、薄膜パターン3の対向位置に配置され、薄膜パターン3の磁気的な特性をインダクタンスの変化として検出する検出コイルLと、検出コイルLを交流励磁しつつ、検出コイルLのインダクタンス変化に応じて交流励磁波に位相ズレを生じさせる交流励磁回路4と、交流励磁回路4から出力される交流励磁波の位相ズレを検出し、該位相ズレにもとづいて、回転軸2の静止時の絶対的な角度又は角度範囲を検出する検出回路5とを備える。
(もっと読む)
ポジションセンサ
【課題】検出コイル等の異常による高周波での発振のために対象物の変位を誤って検出するのを防ぐことのできるポジションセンサを提供する。
【解決手段】検出コイル1と、検出体2と、検出体2の変位に応じて変化する検出コイル1のインダクタンスに対応した周波数の発振信号を出力する発振部3と、発振部3から出力された発振信号の発振周期に基づいて対象物の変位を検出する信号処理部5とを備え、発振部3の後段に、発振部3から出力される発振信号の有無を検出するとともに、発振信号が無い場合に異常が発生した旨を信号処理部5に知らせる無信号検出部7を設け、発振部3と無信号検出部7との間に、少なくとも発振信号の周波数よりも高い周波数の信号を遮断するローパスフィルタ8を設けた。
(もっと読む)
変位量検出装置
【課題】 環境因子の影響を受けずに検出対象物の変位量を検出することができる変位量検出装置を提供する。
【解決手段】 発振回路2は、検出対象物4との相対距離の変化に応じてインダクタンスが変化するコイル5を備え、前記コイル5のインダクタンスに依存する周波数の信号を出力する。信号処理部3は、各コイル5と検出対象物4との相対距離をそれぞれ独立変数として、各発振回路2の発振周波数を予め定める次数の多項式でそれぞれ近似し、この近似した複数の多項式を用いて前記多項式の係数を消去することによって求められる各発振回路2の発振周波数と検出対象物4の変位量yとの関係に基づいて、検出対象物4の変位量yに相当する電気信号を出力する。
(もっと読む)
回転検出装置の信号処理回路
【課題】ロータが同じ方向に回転している場合には、出力パルスの欠落が生じないようにしつつ、ロータが短い周期で繰り返し回転方向を切替える場合には、不要なパルスの出力を抑制することが可能な回転検出装置の信号処理回路を提供する。
【解決手段】例えば、正転出力要求信号保持回路27に正転パルス出力要求信号が保持されて、正転パルス信号を出力し、その後、連続するパルス間の時間間隔を確保するための待機時間の経過中に、ロータの回転方向が正転方向から逆転方向に切替わって、逆転出力要求信号保持回路28に逆転パルス出力要求信号が保持されると、待機時間を相対的に短い第1正転待機時間から相対的に長い第2正転待機時間に切替える。
(もっと読む)
回転角度検出装置および回転角度検出方法
【課題】回転体の回転角度をより精度高く検出することができる技術を提供する。
【解決手段】回転体の回転角度を予め定められた周期で演算するECUは、回転体の回転角度を演算する毎に、第1の回転角度センサの検出タイミングと第2の回転角度センサの検出タイミングとの位相差ΔTABを演算し(S603)、第1の回転角度センサおよび第2の回転角度センサが第1の従動ギアあるいは第2の従動ギアの回転角度θAおよびθBを検出した時点の回転角度である検出回転角度を第1の回転角度センサおよび第2の回転角度センサの検出結果に基づいて演算し(S602)、位相差ΔTABに基づいて、第1の従動ギアおよび第2の従動ギアのいずれか一方の従動ギアの回転角度を補正し(S609)、補正した一方の従動ギアの回転角度と演算した他方の従動ギアの回転角度とに基づいて回転体の回転角度φを演算する(S613)。
(もっと読む)
回転角度検出装置および回転角度検出方法
【課題】回転体の回転角度をより精度高く検出することができる技術を提供する。
【解決手段】回転体の回転に連動して回転する第1の従動体および第2の従動体と、第1の従動体および第2の従動体それぞれの回転角度を検出する第1および第2の回転角度センサと、第1および第2の回転角度センサにより入力された検出結果に基づいて回転体の回転角度を演算する回転角度演算部とを備え、回転角度演算部は、第1および第2の回転角度センサが第1あるいは第2の従動体の回転角度を検出した時点の回転角度である検出回転角度を第1および第2の回転角度センサの検出結果に基づいて演算し(S506)、第1および第2の回転角度センサが検出した時点からその検出結果の入力時点までの回転体の回転角度の変化量を推測し(S508)、検出回転角度と変化量とに基づいて回転体の回転角度を演算する(S509)。
(もっと読む)
回転角度検出装置および回転角度検出方法
【課題】回転体の回転角度をより精度高く検出することができる技術を提供する。
【解決手段】回転体の回転角度を演算するECUは、第1の回転角度センサの検出タイミングと第2の回転角度センサの検出タイミングとの位相差ΔTを認識し、第1の回転角度センサおよび第2の回転角度センサが第1の従動ギアあるいは第2の従動ギアの回転角度を検出した時点の回転角度である検出回転角度θAおよびθBを第1の回転角度センサおよび第2の回転角度センサの検出結果に基づいて算出し(S501)、位相差ΔTに基づいて、算出した第1の従動ギアおよび第2の従動ギアのいずれか一方の従動ギアの回転角度を補正し(S504)、補正した一方の従動ギアの回転角度とS501にて算出した他方の従動ギアの検出回転角度とに基づいて回転体の回転角度φを算出する(S508)。
(もっと読む)
インターフェースを自動検出するための装置及び方法
データ伝送路(100)を介して相互に接続された位置測定装置(10)と下流電子機器(110)との間のインターフェースを自動検出するための装置において、位置測定装置(10)が、インターフェース・ユニット(20)及び位置測定ユニット(30)を備え、インターフェース・ユニット(20)が、一方ではデータ伝送路(100)に接続されており、他方では、データ交換の目的で位置測定ユニット(30)に接続されており、インターフェース・ユニット(20)で、少なくとも2つのインターフェースからなる下流電子機器(110)とのインターフェースが選択可能である。位置測定装置(10)には、さらにインターフェース検出ユニット(200)が配置されており、インターフェース検出ユニットに、下流電子機器(110)から伝送路(100)を介して到着する少なくとも1つの入力信号(E1、E2)が供給され、信号状態に関連して少なくとも1つの入力信号(E1、E2)の信号エッジの時系列を判定する手段を備え、さらに評価ユニット(260)を備え、評価ユニットで、判定した時系列を評価することにより、下流電子機器(110)に対して使用されたインターフェースが検出可能であり、インターフェース・ユニット(20)で選択可能である。  (もっと読む)
(もっと読む)
回転体の位相・速度検出装置
【課題】広い速度範囲で位相・速度検出の精度を高め、しかも検出回路の信号処理で発生する位相ずれを補償した位相・速度検出ができる。
【解決手段】正弦波エンコーダ1は回転体に結合されて位相差π/2のA,B相の正弦波信号を得る。位相・速度検出回路(5A,5B,6〜8)は、A,B相の正弦波信号からノイズ成分を除去し、A/D変換データに変換し、位相を求めて回転体の位相・速度を求める。位相・速度検出回路(2A,2B,3,4)は、正弦波信号を方形波パルスに変換し、これら方形波パルスの数とパルス位相から回転体の位相・速度を検出し、この方形波パルスの数により位相・速度検出回路8の上位桁を設定する。切替スイッチ9は回転体の高速度領域と低速度領域で位相・速度検出値を切り替える。方形波パルスによるパルス位相と、正弦波信号によるアナログ位相との間の位相ずれを補完する。
(もっと読む)
位相シフトしたバイアスバーストを伴う磁歪変位変換器
アセンブリ100は、変換器出力122を提供する磁歪変換器116を含む。増幅器回路124は、変換器出力を受信し、変換器出力バースト126およびバイアス出力バースト128を生成する。変換器出力バーストおよびバイアス出力バーストは、時間が重複し、位相差だけ異なる。バーストプロセッサ130は、変換器出力バーストおよびバイアス出力バーストを受信する。バーストプロセッサは、変換器出力バーストおよびバイアス出力バーストが同じ電圧レベルである時間の関数である、変位出力118を提供する。 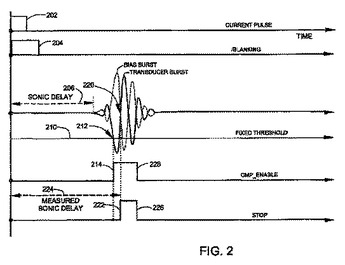 (もっと読む)
(もっと読む)
回転検出装置および回転検出装置付き軸受
【課題】 検出分解能が高く、かつ検出される回転速度のばらつきも小さくできる回転検出装置、およびこの回転検出装置を組み込んだ回転検出装置付き軸受を提供する。
【解決手段】 この回転検出装置1は、回転自在に設けられ円周方向に並ぶ複数の被検出極が等配されたエンコーダ2と、このエンコーダ2の前記被検出極を検出してパルスを発生するセンサ3とを備え、これに逓倍手段4と速度検出手段5が付加される。逓倍手段4は、前記センサ3の発生するパルスを設定された逓倍数に逓倍して逓倍パルスを生成する。速度検出手段5は、前記逓倍手段4が逓倍パルスを発生する毎に、その逓倍パルスから過去に逓倍数分の逓倍パルスを発生した区間における前記エンコーダ2の平均速度を検出する。
(もっと読む)
磁気式絶対値エンコーダ装置
【課題】1回転内の角度検出と多回転量を検出でき、消費電力の小さい信頼性の高い磁気式絶対値エンコーダ装置を得る。
【解決手段】外部電源が遮断した場合、電圧モニタ付電源回路65はバッテリ電源からバックアップ付電源を生成して供給し、バックアップ無電源は遮断する。このとき、電圧モニタ付電源回路65は、外部電源が遮断したことを知らせるモニタ信号をスイッチ66に出力する。このモニタ信号を受けてスイッチ66は、磁気検出素子4と1回転信号生成部61間の接続を切り離す。
(もっと読む)
エンコーダ装置及びそのディスク同心度測定方法
【課題】簡単な演算で、精度の良く偏心量を求めることができるエンコーダ装置及びその偏心量測定方法を提供する。
【解決手段】ステップ1で、エンコーダ装置の電源ONし、ステップ2で、図示しない回転ディスクを一定速度で回転させる。ステップ3で、図示しない上位装置より同心度測定コマンド送信する。ステップ4で、回転ディスク(図示せず)の1/2回転分のパルス数であるP/2パルスのカウントに要した時間を測定し、ステップ5で偏心量を計算するとともに記憶する。ステップ6で設定回数行ったか確認する。ステップ7で、ステップ5で記憶した偏心量の最大値を抽出し、ステップ8で、基準値内であるか否かを判断し、ステップ9で、基準値内であれば、OK信号を、基準値を超えていればNG信号を上位装置(図示せず)に送信する。
(もっと読む)
直交エンコーダを調整し、デコーダ処理速度を確立するシステム及び方法
【課題】 所望の安全係数に加えて、エンコーダ性能論理状態幅誤差の測定値を利用して、論理デコーダに対する最低要求処理速度を判定するように配列されているシステムを提供する。
【解決手段】 本発明の論理エンコーダ性能を解析するシステムは、エンコーダのチャネルの論理信号の立ち上がりエッジ及び立ち下がりエッジを獲得するサンプラと、立ち上がりエッジと立ち下がりエッジを利用して2つ又はそれより多い論理状態幅を判定し、幅の1つと幅の少なくとも他の1つ間の不同を判定する論理とを含むことを特徴とする。
(もっと読む)
位置検出装置
【課題】被検出体の挙動に拘らず、その運動位置を正確にしかも高い信頼性のもとに求めることができる位置検出装置を提供する。
【解決手段】位置検出装置は、回転情報送信部100及び回転位置演算部200を備えて構成される。このうち回転情報送信部100は、回転センサ110を通じて検出されるクランク軸の回転角度に基づき同クランク軸の角度情報を生成し、該生成した角度情報をクランク軸の回転角度が所定の単位量となる毎に主導的に送信する。他方、回転位置演算部200は、この送信される角度情報をスレーブ装置として受信し、それら角度情報の開始エッジを計数してクランク軸の回転角度を求める。
(もっと読む)
エンコーダカウンタ
【課題】各相の信号にパルス抜け等が生じて本来の物理状態量が正しく伝送されないような場合でもこれを修正して正しい計測のもとで安定した制御を継続できるエンコーダカウンタを提供する。
【解決手段】アップダウンカウンタ3と、ラッチ回路4を備えたエンコーダカウンタ1において、更に、A相ディジタルフィルタ21とB相ディジタルフィルタ22を備え、A相信号11はA相ディジタルフィルタに入力しノイズを取り除いてアップダウンカウンタへ出力し、B相信号12はB相ディジタルフィルタに入力しノイズを取り除いてアップダウンカウンタへ出力し、アップダウンカウンタは各相ディジタルフィルタの出力信号に基づいて、パルス数を計数するものである。
(もっと読む)
1 - 20 / 20
[ Back to top ]