
Fターム[2F112CA08]の内容
光学的距離測定 (16,745) | 対象、用途 (2,011) | 具体的に適用対象が特定されているもの (958) | 三次元形状計測装置 (151)
Fターム[2F112CA08]に分類される特許
1 - 20 / 151
距離計測方法および装置とそれを搭載した形状計測装置
ステレオ3次元計測装置
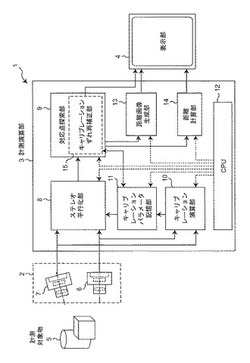
【課題】回路規模および演算時間の増大を招くことなくキャリブレーションずれを再補正する。
【解決手段】キャリブレーションによって補正された左右のカメラステレオ平行化後画像間のずれ量を、キャリブレーションずれ再補正部15を含む対応点探索部9による対応点の探索処理中において、キャリブレーションずれ再補正部15によるキャリブレーションずれ再補正処理で得られるデータを用いて再補正する。こうして、距離計測装置1における内部ハードウェアの回路規模および演算時間を増大させることなく計測精度を高めることができる。また、上記右カメラステレオ平行化後画像を上下にずらして、左右のカメラステレオ平行化後画像の上下方向のずれを再補正する。こうして、問題になり易い上下方向のキャリブレーションずれを低減することができる。その際に、対応点の探索を行う際の右カメラステレオ平行化後画像の最適位置を確実に見出すことができる。
(もっと読む)
光3次元カメラ

【課題】近距離から遠距離まで高い測距精度を確保する。
【解決手段】ターゲット20への送信光を出力する光源3と、送信光を所定照射強度パターンとする拡散板4と、所定照射強度パターンとされた送信光に対するターゲット20からの散乱光を複数の素子で受光し、電気信号に変換する受光素子アレイ7と、電気信号から位相を検波する位相検波器アレイ8と、電気信号から強度を検出する強度検出部101と、強度に基づいて、三角測量方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部102と、位相に基づいて、TOF方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部103と、強度に基づいて、素子ごとに距離検出部102,103による計測結果のいずれか一方を選択する判定部104と、選択された計測結果に基づいて、ターゲット20の3次元形状を計測する3次元画像出力部105とを備えた。
(もっと読む)
3次元計測システム及び3次元計測方法
【課題】外部標定の容易なステレオ撮影による3次元計測システム及び3次元計測方法を提供する。
【解決手段】3次元計測システムは、測定対象物1を複数方向から撮影してステレオ画像20を得るステレオ撮影部11と;測定対象物の全体をカバーする基準体2の一部を構成する、複数の基準マーク4を有するサブ基準体3と;ステレオ撮影部で撮影して得たステレオ画像に基づくサブ基準体が有する複数の基準マークの3次元座標値の撮影測定値fと予め基準計測された基準測定値gとを含む、基準体の3次元数値解析モデルである基準体モデル102を3次元計算空間V中に一体として画成する基準体情報画成部12と;基準体モデルを用いてステレオ撮影部の外部標定要素を算出する標定要素算出部13と;外部標定要素により定位されたステレオ撮影部により撮影される測定対象物のステレオ画像から測定対象物の3次元計測をおこなう3次元計測部14とを備える。
(もっと読む)
画像処理装置
【課題】パターンマッチングの対象となる一対の画像データにおける空間周波数の偏差を抑制することで、適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、一対の画像データにおいて、各画素に予め設定されている色相の輝度を周囲の画素に基づいて合成する色合成部174と、一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部180と、を備える。こうして、空間周波数の偏差を抑制して適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
距離計測装置及び距離計測方法
【課題】計測密度の低下を防止して高密度な距離計測を実現することのできる距離計測装置を提供する。
【解決手段】本発明の距離計測装置1は、複数のドットを配置した投光パターンを照射する投光部2と、投光パターンが計測対象物で反射された光を撮像する撮像部3と、所定の距離範囲内に計測対象物が存在した場合に投光パターンのドットの撮像位置がエピポーラ線方向に移動する移動軌跡を示した距離別計測パターンと撮像部3による撮像画像とを比較することにより、計測対象物が存在する距離範囲を特定する距離範囲特定部6と、距離別計測パターンの移動軌跡上における撮像画像のドット位置に基づいて計測対象物の位置を特定する位置特定部7と、位置特定部7で特定された計測対象物の位置に基づいて計測対象物までの距離を算出する距離算出部8とを備えることを特徴とする。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】多重解像度戦略を用いた対応点探索処理において信頼度が局所的に悪化した場合における総合信頼度を改善する。
【解決手段】画像処理装置は、複数の階層にわって複数の解像度で階層的に表現された複数の基準画像と複数の参照画像とを取得する取得部と、注目点を複数の基準画像にそれぞれ設定する設定部と、注目基準画像の注目点に対応した注目参照画像の対応点を探索する対応点探索処理を各階層において逐次行なう探索部と、各階層における対応点探索処理の結果に関する各信頼度を決定する決定部と、各信頼度の全体的な状況を表現した基準値を、互いに隣接した各階層組みのそれぞれの間にわたる各信頼度についての各信頼度変化のうち一部の信頼度変化を他の信頼度変化よりも強調した補正値を用いて補正することにより、各信頼度を総合した総合信頼度を算出する演算部とを備える。
(もっと読む)
走査型検出測定装置、及び測定方法
【課題】簡素な構成を採用しつつ検出光量ムラの発生を抑制可能とした走査型検出測定装置を提供する。
【解決手段】本発明の走査型検出測定装置は、レーザ光を射出する発光素子と、発光素子から供給されるレーザ光を走査しつつ標本に照射する走査光学系と、標本から生じる光を検出する検出光学系と、発光素子と走査光学系との間に設けられレーザ光の一部を発光素子に向けて反射させる反射光学素子と、を有することを特徴とする。
(もっと読む)
物体検出装置および情報取得装置
【課題】透過率の再現性が高い分光素子を用いながら、適正にレーザ光源の光量制御が可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、発光装置10と、受光装置20と、を備える。発光装置10は、レーザ光源110と、コリメータレンズ120と、リーケージミラー130と、リーケージミラー130によって反射されたレーザ光をドットパターンを有するレーザ光に変換するDOE140と、リーケージミラー130を透過したレーザ光を受光して受光量に応じた検出信号を出力するFMD160と、リーケージミラー130とFMD160との間に配置され、リーケージミラー130を透過したレーザ光の光量を減衰させるフィルタ150と、FMD160の検出信号に基づいて、レーザ光源110の発光量を制御するAPC制御部21bと、を有する。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】ブロックマッチングにより探索される対応点の信頼度を改善する。
【解決手段】画像処理装置は、第1画像上に予め設定された注目点を空間的に内包する第1基準ブロックと、第2画像上に設定された複数の第1参照ブロックのそれぞれとの画像内容の類似度をそれぞれ表現した複数の第1指標値を取得する第1演算部と、該複数の第1指標値に基づいて、注目点に対応した対応点の複数の候補点を前記第2画像においてそれぞれ抽出する抽出部と、複数の候補点をそれぞれ空間的に内包する複数の第2基準ブロックのそれぞれと、第1画像上の第2参照ブロックとの第2ブロックマッチングにより、複数の候補点のそれぞれについて、対応点としての選択の適性を表現した複数の第2指標値を取得する第2演算部と、該複数の第2指標値に基づいて、複数の候補点の中から1つを選択することにより、対応点を決定する決定部とを備える。
(もっと読む)
物体までの距離を測定するためのシステムおよび方法
【課題】1つまたは複数の物体の画像から得ることができる、距離測定の予測精度を反映している信号を提供する。
【解決手段】物体14までの距離12を測定するためのシステム10が、ある位置に配置されたカメラ16と、カメラ16の設定を反映した信号30,32,34とを備える。カメラ16に作動可能に接続された制御装置18が、信号を受信し、信号に基づいて精度信号36を生成する。精度信号36は、距離測定の予測精度を反映している。制御装置18に作動可能に接続された表示器38,42が、精度信号36を反映している表示を提供する。距離測定の方法は、カメラを配置するステップ、距離測定の予測精度を反映している信号を生成するステップ、信号を反映している表示を提供するステップ、その位置で物体の1つまたは複数の画像を撮影するステップと、その1つまたは複数の画像に基づいて、物体までの距離を計算するステップとを含む。
(もっと読む)
撮像対象物の境界検知装置および境界検知方法
【課題】距離画像カメラとこれより高解像度の赤外カメラなどを組み合わせることで撮像対象物の境界などを的確に検知可能な境界検知装置および境界検知方法を提供する。
【解決手段】第1光を照射する第1発光部11aと、その反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された第1種画素毎に有する距離画像を取得する第1撮像部11bと、撮像光軸が平行になるように配置されるとともに前記距離画像の前記第1種画素より多数の2次元配置された第2種画素毎に階調情報を有する通常画像を取得する第2撮像部12aと、これらを制御するとともに前記距離画像および前記通常画像に対する演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は輪郭抽出部、輪郭対応画素抽出部、最短距離画素暫定選択部、最短距離画素選択確定部および輪郭認識部を有する。
(もっと読む)
距離画像カメラおよびこれを用いた対象物の面形状認識方法
【課題】様々な形状の箱などが混載されている場合であっても、それらを正確に分離して認識可能な距離画像カメラおよびこれを用いた対象物の面形状認識方法を提供する。
【解決手段】対象物へ向けて光を照射する発光部11と、反射光が戻ってくるまでの時間の測定値から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、取得した前記距離画像の各画素の前記距離情報が前記距離画像カメラからの距離を複数に分割した距離区間のいずれに対応するかを判定し、前記距離区間毎に前記距離情報が対応する画素数をそれぞれ集計した集計結果が最大であった前記距離区間いずれかを選択するとともに、そうして選択された前記距離区間のみに前記距離情報が対応する画素の2次元配置位置に基づいて前記対象物が前記距離画像カメラに対向している面の形状を認識する画像処理を行う演算制御部13とを備える。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
形状計測装置
【課題】計測対象物体の形状を高速かつ高精度に計測する装置を提供する。
【解決手段】計測対象物体21の形状を計測する装置であって、光源用基板32と、該光源用基板32上に配置された複数の格子投影用LED33とを有する格子投影用光源31と、1次元格子が描かれた格子面を含む、光源用基板32に平行に配置された格子プレート34とを有する格子投影部30と、1次元格子が投影された計測対象物体21を撮影する撮影部11と、撮影された画像に対して位相解析処理を施して、計測対象物体21の形状を求める解析制御装置12とを備え、複数の格子投影用LED32の各々の光軸が、光源用基板32の法線に対して、計測対象物体21側に傾斜していることを特徴とする。
(もっと読む)
3次元形状測定装置
【課題】チャープ光の長さに依存することなく、奥行きの計測範囲を長くすることができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置10は、波長が規則的に経時変化するチャープ光を生成して被測定物Wに対して照射するチャープ機器16と、被測定物Wを反射した反射チャープ光を所定タイミングで所定期間切り出す複数のシャッタ部22a、22b、22cと、複数のシャッタ部22a、22b、22cにより切り出された反射チャープ光と前記複数のシャッタ部22a、22b、22cの位置情報とを用いて、被測定物Wの複数領域の3次元情報を取得する3次元情報取得部26とを備え、複数のシャッタ部22a、22b、22cは、被測定物Wの基準位置に対して距離が異なるように設けられている。
(もっと読む)
撮像装置
【課題】画角内の輝度差が大きい場合であっても正確なデプスマップを得られる撮像装置を提供する。
【解決手段】所定の焦点面の近傍に二次元状に配置された複数の正レンズと、複数の正レンズの各々に対応して当該正レンズの後側に配置された複数の受光素子を有する第1の撮像素子と、複数の正レンズの各々について、前記第1の撮像素子の出力から、当該正レンズに像が結ばれた被写体までの距離を表す値を算出する距離算出手段と、第1の撮像素子に複数回の撮像をそれぞれ異なる電荷蓄積時間で連続して行わせる制御手段と、前記第1の撮像素子により連続して行われた複数回の撮像の各々についてデプスマップを作成するデプスマップ作成手段と、デプスマップ作成手段により作成された複数回の撮像にそれぞれ対応する複数のデプスマップを合成して合成デプスマップを作成する合成手段と、を備える撮像装置。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
画像測定装置
【課題】高精度かつ高速なオートフォーカス処理を可能にする。
【解決手段】画像測定装置は、ワークを撮像するフレームレートが可変の撮像装置と、前記ワークに対して光を照射する照明装置と、前記撮像装置の合焦位置を制御して前記合焦位置を合焦軸方向の位置情報として出力する位置制御システムと、前記位置制御システムによる合焦位置の制御に際して前記撮像装置のフレームレートを制御すると共に、前記撮像装置のフレームレートに応じて前記照明装置の光量を調整する制御装置とを備える。
(もっと読む)
3次元形状測定装置
【課題】受光センサにて受光した反射光のスポットが欠けた場合であっても、精度良く測定対象物の3次元形状を測定できる3次元形状測定装置及び3次元形状測定方法を提供する。
【解決手段】受光信号の強度の閾値としてレベルL1を設ける。受光信号の強度が最も大きい受光素子の位置を基準位置P1(n)とする。基準位置P1(n)の両側から、受光信号の強度がレベルL1である受光素子又はレベルL1に最も近い受光素子の位置を1つずつ取得する。前記取得した2つの受光位置の中点と基準位置P1(n)とのずれ量D1が許容値以下であれば、基準位置P1(n)を反射光の結像位置P(n)と決定し、結像位置P(n)を用いて、その測定ポイントの3次元座標を算出する。ずれ量D1が許容値より大きければ、その測定ポイントの3次元座標を算出しない。
(もっと読む)
1 - 20 / 151
[ Back to top ]