
Fターム[2F112DA04]の内容
Fターム[2F112DA04]の下位に属するFターム
レンズの組合せ (143)
非球面レンズ(シリンドリカルレンズ) (53)
Fターム[2F112DA04]に分類される特許
201 - 220 / 360
画像撮影装置およびその距離演算方法と合焦画像取得方法
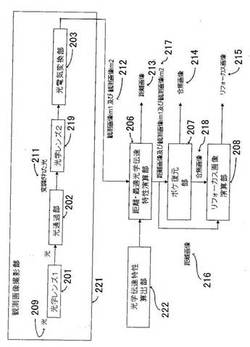
【課題】テレセントリック光学系を用いたりする光学的制限や、劣化画像復元処理を複数回行う処理量的制限などが存在した。
【解決手段】複数の絞りパターンで同一の被写体を撮影して複数の観測画像を得る観測画像撮影部221と、被写体までの距離に応じた光学伝達特性を算出する算出部222と、複数の観測画像と光学伝達特性から、被写体までの距離を算出する距離演算部206と、を備える。また、複数の絞りパターンで同一の被写体を撮影して複数の観測画像を得る観測画像撮影部221と、被写体までの距離に応じた光学伝達特性を算出する算出部222と、複数の観測画像と光学伝達特性から、ボケ量が最小となる光学伝達特性を算出する光学伝達特性演算部206と、ボケ量が最小となる光学伝達特性を利用して画像のボケを復元し合焦画像を得るボケ復元部207と、を備える。
(もっと読む)
車間距離検出装置、ドライブレコーダ装置

【課題】近距離領域において、他車両と自車両の車軸又は路面が相対的に角度をなしていても、車間距離を精度よく検出できる車間距離計測装置及びドライブレコーダ装置を提供すること。
【解決手段】他車両11を撮影する撮影手段21と、他車両11が撮影された画像データから該ナンバープレート12のプレート画像13を検出するプレート画像検出手段31と、ナンバープレート12のサイズを決定するプレートサイズ検出手段32,33と、車間距離を検出する車間距離検出手段34と、プレート画像の対角交点を検出する対角交点検出手段37と、所定の2次元座標における対角交点の移動を監視して、他車両と自車両の車軸のなす角又は他車両の路面と自車両の路面の相対的な傾斜角を検出する傾き角検出手段38、39と、なす角又は傾斜角に基づき、車間距離を補正する車間距離補正手段35と、を有することを特徴とする。
(もっと読む)
光学式測定システム
【課題】 高速で高精度な測定を行えるようにすること。
【解決手段】 測定対象120に測定用光を照射する光源部101と、光源部101とは位置関係が無関係であるが相互の位置関係が既知で、測定対象120からの測定用光を偏向する第1、第2光偏向素子108、109と、第1、第2光偏向素子108、109からの測定用光を検出する1つの光検出素子105と、測定対象120から反射した測定用光が第1、第2光偏向素子108、109の双方を介して光検出素子105へ入射する測定対象120上の点Pについて、第1、第2光偏向素子108、109を介して光検出素子105が検出した測定用光に基づいて三角測距法によって測定対象120についての長さに関する情報を算出する演算装置115とを備えている。
(もっと読む)
測距装置、測距方法、測距プログラム又は撮像装置
【課題】被写体距離が空間変動する場合でも、高い精度で測距を行う。
【解決部】異なる撮影パラメータで撮影したぼけの異なる複数の画像間において、測距対象画素を含有する処理対象領域(k1、k2)毎に、ぼけの相関量を演算するぼけ相関量演算部(103)と、前記処理対象領域毎に演算したぼけの相関量から、前記処理対象領域毎に被写体距離を算出する被写体距離決定部(109)と、を有する測距装置であって、前記ぼけ相関量演算部(103)は、前記処理対象領域内の画素毎に、画素単位のぼけの相関量を演算する画素相関量演算部(106)と、前記処理対象領域内の画素毎に、前記画素単位のぼけの相関量の重み係数を設定する加重制御部(107)と、前記重み係数に基づいて、前記画素単位のぼけの相関量の加重平均を行い、前記加重平均の値を前記処理対象領域のぼけ相関量として演算する加重平均演算部(108)と、を備える。
(もっと読む)
形状測定装置
【課題】被測定物の連続的かつ機械的な駆動なしに焦点面の異なる画像情報を短時間で得られる形状測定装置を提供する。
【解決手段】光量センサー2はセンサー素子2a〜2dを1次元方向に備える。センサー素子2a〜2dは光学系(図示せず)によって、被測定物1の計測線12近傍の高さHa,Hb,Hc,Hdに焦点Va,Vb,Vc,Vdを結ぶ。被測定物1の表面13は黒白に塗り分けられ、センサー素子2a〜2dと光学系を被測定物1の領域Y1から領域Y8方向に移動走査する。時刻で各センサー素子の光量値を読み出し、その値を位置とともに記録する。各センサー素子の光量値は、被測定物1の表面13に合焦ならば表面色の黒13bまたは白13wに対応し、合焦でなければ黒と白が混ざった灰色の値を持つ。この黒,白,灰色の光量値に基づき高さHa〜Hdについて合焦評価を行うことで、各領域Yについての高さを同定できる。
(もっと読む)
距離測定装置および方法並びにプログラム
【課題】精度よく対応点を探索するための相関ウィンドウのサイズを、簡易に算出する。
【解決手段】ウィンドウサイズ設定部32が、基準画像上の対象点について、基準画像上の所定方向に延在する、対象点を中心とする探索画素列であって、探索画素列内の画素における輝度値の最大値と最小値との差分値が所定輝度間隔を超える探索画素列を設定し、探索画素列の画素数を、対象点に対する参照画像上の対応点を探索する際に使用される、基準画像および参照画像の相関を算出する基準となる相関ウィンドウのサイズに設定する。ステレオマッチング部30が、相関ウィンドウ内の各画素と、参照画像上に設定された相関ウィンドウ内の各画素との相関を算出することにより対応点を探索する。距離画像生成部31が、探索した対応点に基づいて距離を算出する。
(もっと読む)
距離測定装置
【課題】精度の高い計測を、迅速かつ簡易に行うことができるようにする。
【解決手段】MLA12は、レンズ11の瞳面に2次元状に配置され、撮像素子13は、2次元状に配置された光電変換機能を有する複数の画素からなり、MLA12の各MLの各々の後側であって、被検物と共役となる位置に配置される。演算処理回路34は、MLA12の各MLの各々により結像された像を、撮像素子13により撮像することで得られるそれぞれが異なる視点となる複数の画像において、それぞれの画像内の注目している特徴点ごとに視差を演算し、それらの視差から被検物の奥行きに関する情報を求める。本発明は、被検物を計測する距離測定装置に適用できる。
(もっと読む)
パラメータ計算装置、パラメータ計算システムおよびプログラム
【課題】車両に搭載された撮影装置を精度高く校正する。
【解決手段】車両に搭載された2台のカメラで同時に撮影された撮影画像を取り込み(100)、一方のカメラで撮影された撮影画像から特徴点を検出し(102)、他方のカメラで撮影された撮影画像から特徴点に対応する対応点を検出し(104)、該特徴点および対応点に基づいて2台のカメラの位置及び姿勢を示す外部パラメータを仮計算し(106)、特徴点、対応点、および仮計算された外部パラメータに基づいて、各特徴点の位置から一方のカメラまでの各々の距離を算出し(108)、該算出された距離に基づいて、所定の距離の領域に分布する特徴点の数が所定数を越えているか否かを判定し(110、112)、上記領域に分布する特徴点の数が所定数を越えていると判定した場合に、該領域に存在する特徴点と該領域に存在する特徴点に対応する対応点に基づいて外部パラメータを再計算する(114)。
(もっと読む)
測距装置
【課題】防振機能付き測距装置の低コスト化を図ること。
【解決手段】測距装置1は、目標物体に向けレーザ光L1を投射する送信光学系10と、目標物体で反射した反射レーザ光L2を受光素子34により受光する受信光学系30とを備える。手ブレなどで光軸2,4が傾いたとき、送信光学系10に配設された防振レンズ14を駆動機構42によりM1のように変位させて光線を偏向する。駆動機構42に連動して受信光学系30に配設された防振レンズ32を駆動機構43によりM2のように変位させるが,M2はM1よりもラフな動作とする。
(もっと読む)
距離計
【課題】1台で近距離用から遠距離用まで使用できる距離計を提供する。
【解決手段】対象物までの距離を測定する距離計は、対象物までの距離を測定するための不可視光を発光する不可視光発光手段と、対象物を指すための可視光を発光する可視光発光手段と、対象物に向けて不可視光および可視光を同一光軸で投光する投光光学系と、投光光学系と対象物に向けた光軸を共有する対象物を見て照準するための照準光学系と、対象物からの不可視光の反射光を受光して受光信号を出力する受光手段と、 受光手段から出力される受光信号に基づいて発光から受光までの時間から対象物までの距離を求めるように制御するとともに、対象物までの距離を測定する場合と対象物を指す場合とにおいて、不可視光発光手段と可視光発光手段とを切り替えて発光させるように制御する制御手段とを備える。
(もっと読む)
測距センサ
【課題】検出対象物との距離に対する出力特性について、透光板からの正反射光による影響を受けることを効果的に防止でき、これにより、検出感度を向上させることができ、さらに、検出対象物との距離に比例する傾向を示す出力特性を得ることができ、これにより、検出精度を向上させることができる測距センサを提供する。
【解決手段】発光素子11と、発光用レンズ12と、受光素子13と、受光用レンズ14と、これらの部材が配設されたセンサケース15,15a〜15eとを備えた測距センサ10a〜10iにおいて、発光素子11及び発光用レンズ12は、検出対象物Qの光照射面Qaとの仮想垂線δを基準にして発光素子11から出射される検出出射光L1の光軸に角度を付けるように配置されている。また、受光素子13は、該受光素子13の受光面13aが仮想垂線δに対して平行になるように配置されている。
(もっと読む)
3次元形状測定装置
【課題】距離カウンタPと幅カウンタWのサンプリング周波数のみに依存せずに形状測定装置と測定対象物との表面との間の距離測定の精度を向上させることができる3次元形状測定装置を提供すること。
【解決手段】CCDラインセンサ部による反射光の分布に複数の閾値を設定し、各閾値のそれぞれに基づき距離カウンタ値Pと幅カウンタ値Wを取得する。そして、各距離カウンタ値と前記各幅カウンタ値とを足し上げて、CCD素子の信号の揺らぎによって得られる複数の閾値による各値を利用し実質的にサンプリング周波数を高めた場合と同等の分解能を獲得し、より正確な測定対象物との距離を算出することができる。
(もっと読む)
3次元画像走査装置
【課題】レーザ光の照射位置における戻り光の正確な光量を測定することにより、正確な位置情報及び輝度情報に基づく正確な3次元画像を生成可能な3次元画像走査装置を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御し、一のタイミング信号後に確認用レーザ光の光量を入射光量測定手段により測定し、この確認用レーザ光の光量から測定用レーザ光の発光量が決定され、入射光量測定手段からの出力に基づくデータ(一定光量出力の確認用レーザの光量)を陰影情報に利用して3次元画像を生成する。
(もっと読む)
撮像装置、撮像方法、プログラム、記録媒体、および集積回路
【課題】距離を推定する撮像装置において、被写体の反射率推定値の精度を向上する。
【解決手段】
被写体に照明光を照射する照明発光部と、前記照明発光部の条件を変えて撮影すること
で、複数枚の画像を取得する撮像部と、前記複数枚の画像から前記照明光成分のみの画像
を取得する照明光成分取得部と、前記複数枚の画像および前記照明光成分のみの画像のう
ち、いずれかの画像から、照度ムラを除去して、各画素に対応する前記被写体の反射率を
推定する反射率推定部と、前記照明光成分のみの画像と前記被写体の前記反射率から各画
素に対応する前記被写体までの距離情報を推定する距離情報推定部と、を備える。
(もっと読む)
3次元形状測定装置
【課題】CCD本来の感度を得る事と、積分等の歪の無い生波形の後処理ができる事と、その例として測定対象物の角(エッジ)部分においても正確な距離情報を取得することができる3次元形状測定装置を提供すること。
【解決手段】本発明に係る3次元形状測定装置は、マッピングデータの処理を用いることにより、デジタル最高値を中心にして、デジタル最高値を示すCCDから徐々に離れた位置に配設されているCCDのデジタル値がこのデジタル最高値よりも徐々に低い値を示すという分布状態を把握することができ、これにより正確に測定対象物の表面に反射したレーザ光が本来収束すべきCCDを特定する。アナログ回路が減る、部品点数が減る、発熱が減る、消費電力が減る、エコである。
(もっと読む)
変位検出装置
【課題】被測定面の面粗度の影響による誤差を緩和させると共に、測定目的に応じた最適な精度で被測定面の変位を検出する。
【解決手段】光源102から射出された射出光Lは光調整部材130Aに入射され、光調整部材130Aにより射出光Lの解像度が調整される。光調整部材130Aでは、射出光Lの近軸光線が遮光されて、射出光Lの解像度が低下するように調整される。解像度が調整された射出光Lは、第1の対物レンズ114により被測定面TGに集光される。被測定面TGにはビーム径が広がった状態の射出光Lが集光される。被測定面TGに集光された射出光Lは被測定面TGで反射され、反射された反射光Lrが受光素子120によって受光される。これにより、非接触センサ100Aの分解能を低下させることができ、被測定面TGの面粗さの影響による測定誤差を緩和させて、より正確に被測定面TGの変位を検出することができる。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器5と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備える。
(もっと読む)
固体撮像素子及び測距装置
【課題】撮像部の出力をその平均値を基準として差動増幅する際に発生する誤差成分の影響をなくすことができる固体撮像素子及びこのような固体撮像素子を用いた測距装置を提供すること。
【解決手段】隣接して配置される複数の画素列111a、111bの光電荷蓄積を同じタイミングで行う。画素列111aからの信号の読み出し時に、平均値保持回路121において画素列111aからの信号の平均値を演算して保持しておくとともに、利得設定値保持回路123において平均値基準読み出しの際の利得を演算して保持しておく。画素列111bからの信号の読み出し時に、平均値保持回路121に保持しておいた平均値及び利得設定値保持回路123に保持しておいた利得を用いて、差動増幅回路126における差動増幅を行う。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8とこれらを制御するタイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、常時発光しているために全ての撮像画像に存在する画素データを、ノイズとして除去するステップS5の処理を備えた。
(もっと読む)
距離測定装置
【課題】プローブ部分を損傷しにくく、かつ、プローブ部分を交換容易な距離測定装置を提供する。
【解決手段】光源2からの光を、コリメータレンズ3により平行光束とし、出射面14から、穴1の内壁にほぼ垂直に照射する。散乱された光を、微小開口15で受光し、ミラー17,18で繰り返し反射させながら、受光レンズ4まで導いて受光する。受光レンズで受光された光は、リニアセンサ5上に結像する。リニアセンサ5での受光位置が分かると、微小開口15に入射した散乱光の入射角度が分かり、これから三角測量の原理で、出射面14から穴1の内壁までの距離が算出できる。
(もっと読む)
201 - 220 / 360
[ Back to top ]