
Fターム[2F112DA04]の内容
Fターム[2F112DA04]の下位に属するFターム
レンズの組合せ (143)
非球面レンズ(シリンドリカルレンズ) (53)
Fターム[2F112DA04]に分類される特許
341 - 360 / 360
光学式測距センサ及びこれを備えた機器

【課題】 大型化やコストアップを招くことなく、被測定物が遠ざかるにつれて距離の測定精度が低下することを防止できる光学式測距センサを提供すること。
【解決手段】 LED1から出射した近赤外波長の光を発光側レンズ3で平行光にして、被測定物10に投射する。被測定物10による反射光が、受光側レンズ3とプリズム4を介してPSD5に入射する。プリズム4は、光の入射角が小さい程、入射角の変化量に対する出射角の変化量の割合が大きい屈折特性を有するので、被測定物10の位置が変化したとき、被測定物10が近距離位置にある場合と遠距離位置にある場合との間で、プリズム4からの出射光の出射角度の変化量を略同じにできる。したがって、被測定物10が遠距離位置にあるときの測定精度を、被測定物10が近距離位置にある場合と略同じにできる。
(もっと読む)
パルス光伝播時間計測装置および仮想マウス等の応用装置

【課題】計測対象が激しく動いても精度良くパルス光伝播時間を計測する。
【解決手段】フェーズロックループ20の介在により送受光部10によるパルス送光と周波数変換回路30及び位相差検出回路50による位相差検出とを両立させたパルス光伝播時間計測装置において、もう一組のフェーズロックループ回路21と周波数変換回路31と位相差検出回路51を設け、そのうち一組はパルス信号Bpの立ち上がりに応動させ、他の一組はパルス信号Bpの立ち下がりに応動させ、その両組の位相差について平均を採ることにより、受光レベルの影響の少ない位相差Eが得られる。
(もっと読む)
通過人数検出装置及び方法
【課題】 駅構内の通路や横断歩道のように比較的広い範囲を通過する人数を正確に計測することを目的とする。
【解決手段】 監視領域にレーザ光を走査状に照射すると共に該レーザ光の反射光を検出することにより、前記監視領域の各位置における距離情報を取得するレーザセンサと、前記各位置における距離情報に基づいて監視領域に存在する通行人の人数を判定し、さらに所定時間内における前記人数の累計を算出し、当該累計を前記監視領域を通過する通行人1人当たりの延べ人数で除算することにより前記所定時間内における通過人数を判定する通過人数判定手段とを備え、該通過人数判定手段は、前記監視領域を通過する通行人の歩行速度の変化に基づいて前記通過人数を補正する。
(もっと読む)
防犯センサ
【課題】
距離情報と大きさ情報とを同時に取得できて、検知精度を向上させると共に情報処理を容易に行うことができ、かつセンサの小型化が図れてコスト的に有利な防犯センサを提供する。
【解決手段】
警戒エリア内に存在する物体までの距離と該物体の大きさとを同時に測定可能な距離画像センサと、該距離画像センサで得られた距離画像の距離情報と大きさ情報とに基づき、物体が人体より大きいか人体より小さいかを区別して侵入者か否かを判定する判定手段と、を備える。距離画像センサは、投光手段から投光された光の反射光を受光手段で受光することによって得られた距離画像の全画素について距離測定を行い、また、背景光を除去可能なCMOS撮像素子によって形成される。
(もっと読む)
ビーム照射装置
【課題】簡素な構成にて、目標領域上におけるレーザ光の照射強度の不均一性を検出できるビーム照射装置を提供する。
【解決手段】DSP制御回路10は、PSD600からの信号をもとに、目標領域上におけるレーザ光のスキャン位置をモニタする。また、受光部90からの信号をもとに、各スキャン位置における目標領域からの反射光量を測定する。DSP制御回路10は、目標領域上におけるスキャン位置(参照位置)の反射光量P0と、当該スキャン位置に隣接する各スキャン位置の反射光量Pkとを比較する。そして、Pk/P0が閾値Rs以下のとき、この反射光量Pkに対応するスキャン位置を、レーザ光の照射強度が不均一である位置と判定する。DSP制御回路10は、レーザ光の照射強度が不均一であるとされた位置のレーザ出射強度を上昇させる。これにより、レーザ光の照射強度が目標領域内において均一化される。
(もっと読む)
測距装置及び撮像装置
【課題】 光センサーアレイの総セグメント数を増やさないようにして、測距装置の製造コストの低減を図る。
【解決手段】 一対の結像レンズL、Rによる結像光束は、それぞれ光センサーアレイ102L、102Rに結像させる。演算部104は、各結像レンズL、Rによる結像状態を光センサーアレイ102L、102Rの出力信号から読み取って被測定物Tからの距離を演算により算出する。結像レンズL、Rは、液状レンズの小滴であり、液状レンズは各結像レンズL、Rを各結像レンズL、Rの光軸SL、SR方向に対して垂直方向へ移動することができる。
(もっと読む)
散乱光によるエラーを抑制するための方法及び光学センサー
【課題】 物体表面(13)上で反射されて、検知器で検知される光線(7)が、タイミングを合わせて作動される主光源(5)を用いて生成される、光学センサー(1)を提供する。
【解決手段】 光線(7)の散乱光によって引き起こされる可能性の有る擾乱作用を抑制するために、主光源(5)の送出休止期間の間に、補償用光源(25)が、主光源(5)の光線(7)の散乱光領域を包含する光円錐を放射する。こうすることによって、この散乱光領域内の物体が、補償用の光に対する成分を発生させ、この成分が、専ら光線(7)の散乱光によってセンサー出力が駆動されるのを防止するものである。
(もっと読む)
適応合焦する眼球外視力人工器官
要約
視力人工器官は、眼球外レンズと連通したアクチュエータを含む。アクチュエータは、レンズの焦点距離を変化させる焦点調節刺激を与える。距離計が物体への距離を推定し、その推定距離をコントローラに与える。コントローラは、アクチュエータに推定距離に基づいて焦点調節刺激を発生させる。 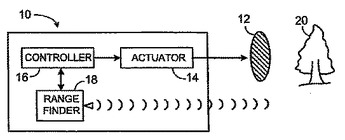 (もっと読む)
(もっと読む)
受波装置及び測距装置
【課題】広い範囲で波を受けることができる受波装置の提供
【解決手段】受波装置は、受光素子3と、受光素子3に向けて反射光12、13を集約させるレンズ2とを備えており、レンズ2は焦点距離が異なった部分を少なくとも3つ以上備えている。レンズ2は焦点距離が異なった部分を少なくとも3つ以上備えており、広い範囲で受光素子3に安定した光量を入射させることができる。
(もっと読む)
光電スイッチ
【課題】小型化を図りつつ受光信号の処理に関する値を容易かつ正確に認識することができる光電スイッチを提供することである。
【解決手段】 ケーシング10の前面部14には、検出領域に光を投射するとともに検出領域からの帰還光を受ける投受光部20が設けられている。ケーシング10の背面部13には、表示部30および2つのプッシュ式の調整スイッチ50が設けられている。ケーシング10内において回路基板100の背面側に回路基板101,102が配置され、回路基板101,102は回路基板100に対して垂直に取り付けられている。表示部30はケーシング10に一体的に形成された透明の窓部35を有し、窓部35に対向するように回路基板100が配置される。回路基板100上には複数のLED31が取り付けられ、LED31上に7セグメントカバー32が配置される。
(もっと読む)
傾斜焦点試験を行う方法及び露光装置、並びにそれに応じて製造されたデバイス
【課題】傾斜焦点試験を行う方法及び露光装置、及びそれに応じて製造されたデバイスを提供すること。
【解決手段】本発明は、
・ 少なくとも1つの反射デバイスを第2の向きに傾斜させるために傾斜用デバイスを使用して、前記第1の投影ビームに対して傾斜を有する第2の投影ビームを供給するステップと、
・ 第2の投影された投影放射ビームを目標物体に生じさせるステップと、
・ 第1及び第2の投影された投影ビームの目標物体上での横方向シフトを決定し、且つ投影された投影ビームに対する目標物体のデフォーカスを前記横方向シフトから決定するステップと、を備える傾斜焦点試験を行う方法に関する。
(もっと読む)
物体検出装置
【課題】複雑な構成を用いることなく、簡易な構成で被写体の位置を複数箇所検出することができる物体検出装置を提供する。
【解決手段】絞り1と、互いに焦点距離の異なる複数の領域を有する複合レンズ2と、複数の領域から所望の焦点距離に対応する領域を選択するとともに、絞り1の開口度を調節する絞り制御部4と、複合レンズ2および絞り1を通して被写体を撮影する撮影部3と、絞り制御部4により絞り1の開口度および所望の焦点距離に対応する領域の少なくともいずれかを異ならせて撮影部3で撮影した被写体の複数の画像同士の合焦状態を比較することによって、被写体の位置を検出する被写体位置検出部11とを備えた。
(もっと読む)
光学式測距センサ、自走式掃除機およびエアコン
【課題】 広範囲な視野角を有し、この広範囲な視野角内に存在する測距対象物の方向および距離を検出できる光学式測距センサを提供することにある。
【解決手段】 基板10と、上記基板10に取り付けられる複数の発光素子1と、上記各発光素子1に対応して配置される複数の発光側レンズ2と、上記基板10に取り付けられる一つの位置検出受光素子3と、上記位置検出受光素子3に対応して配置される一つの受光側トロイダルレンズ4と、上記基板10に取り付けられる制御部6とを備える。この制御部6は、上記各発光素子1を所定のタイミングで駆動すると共に、上記位置検出受光素子3から出力される信号を処理する。
(もっと読む)
光学的変位測定器
【課題】新しい方法により、使いやすい光学的変位測定器を提供することである。
【解決手段】測定対象物8の前方に円錐形状の対物プリズム16が配置される。光源12、コリメートレンズ14により、対物プリズム16の中心光軸30から平行に偏移した往路光40が対物プリズム16を通り、その円錐形状の界面で屈折して測定対象物8に入射される。測定対象物8の表面で反射された光は、対物プリズム16に戻され、その円錐形状の界面で再び曲げられ、往路光40に平行な復路光46となる。中心光軸30からの復路光46のオフセット量は、測定対象物8の変位に応じて変化する。復路光46を集光レンズ18で焦点19に集光し、ピンホール光学素子20で散乱光の影響を抑制して、光位置検出センサ22でオフセット量を検出し、測定対象物8の変位を測定する。
(もっと読む)
侵入警戒センサ
【課題】施工性が良好で誤動作しにくい侵入警戒センサを提供する。
【解決手段】侵入警戒センサ1は、建物の内部に設置され、建物内への侵入路となる開口部を含めた対象空間に強度が周期的に変化する強度変調光を照射する発光源5、および、受光光量に応じた電気出力を発生する複数個の感光部が配列されて対象空間を撮像する光検出素子3を具備し、発光源5から対象空間に照射された光が対象空間内の対象物で反射され各感光部で受光されるまでの強度変調光の位相差を対象物までの距離に換算することにより画素値が距離値である距離画像を生成する距離画像センサ部2と、距離画像センサ部2から入力される距離画像より、隣接する画素間の画素値の差が所定のしきい値を超える画素を抽出し、抽出した画素で囲まれる部分を開口部として検出するとともに、距離画像から開口部の近傍における侵入物体の存否を検出する信号処理回路10とを備える。
(もっと読む)
光学式測距センサおよび自走式掃除機
【課題】 騒音が無く、長期安定性が比較的良好で、小型化とコスト削減ができ、しかも、測定精度が比較的高い光学式測距センサを提供すること。
【解決手段】 複数のLED51〜55からの出射光を、1つの発光レンズ1で透過して、被検出物32で反射された反射光を、受光レンズ2を介してPSD4で受光する。LED51〜55からの光出射方向によって被検出物32の方向を検出すると共に、PSD4の受光面における反射光の受光位置に基づいて、被検出物32に対する距離を検出する。焦電型センサ30で遠赤外線L10を受光することにより、被検出物32が人体であるか否かを検知する。1つの受光レンズ1によって複数のLED51〜55の出射光を透過するので、光学式測距センサの小型化とコスト削減を行うことができる。
(もっと読む)
目標捕捉装置
多重反射のビーム成分を意図的に減衰させる。減衰フィルタ(18,19)を受信器(2)の前に及び送信器(1)の後にそれぞれ設ける。ビーム成分の強度の減衰は、ファクターで0.7、少なくとも0.5または0.3となる。別の方法または追加的に、ミラー(10)または立方体プリズム(14)の偏向手段を用いてビームを減衰させることができる。多重反射するビーム成分は、減衰手段を少なくとも2回通過する。従って、通常のビーム成分に比べて、一層減衰される。さらに受信器(2)の入力表面(5)は、円錐の偏向表面で囲まれている。この偏向表面は、そこに入射する光を吸収し、残部を入力方向以外の方向に反射して、多重反射を生じさせない。  (もっと読む)
(もっと読む)
移動制御システム
本発明は、車両またはロボットアームなど移動プラットフォームの制御に使用できる移動制御システムに関する。本発明は特に車両用の運転支援、車両用のセルフパーキング支援システムに利用できる。3次元カメラ(12)がプラットフォーム、例えば車(102)上に置かれ、プラットフォームまわりの環境を撮像する(114)ように配置される。プロセッサ(7)が3次元情報を用いて環境モデルを生成し、このモデルを利用して移動制御信号を生成する。好ましくは、プラットフォームは環境に対して移動し、様々な位置からの環境の複数の画像を取得する。 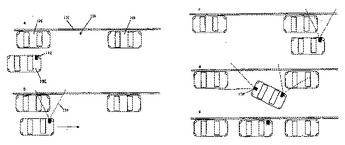 (もっと読む)
(もっと読む)
光学測定ヘッド
本発明に従う測定ヘッド(4)は、好ましくは回折レンズであるゾーンレンズ(26)と半球レンズ(23)又はGRINレンズ(33)の組み合わせを有する。これは、高い開口数を有する非常に細い測定ヘッド(4)になる小型化の可能なコンセプトを表し、従って、ベストな解像能力をもたらす。このような測定ヘッドは、測定ヘッドの測定すべき表面への指向に関する角度誤差又は測定ヘッドの光軸に対する面の斜めの位置決めに対して反応しない。  (もっと読む)
(もっと読む)
近接度検出器
光源(1)と、光源(1)により照明されるときに基準物から生じる後方散乱光を受光するための光検出器(3)とを備え、光検出器(3)への後方散乱される光の強度を近接度の尺度として利用することにより、第1の物体(目標物)と第2の物体(基準物)との間の近接度を検出するための装置に関する。目標物(2)は、焦点面(7)を有し光源(1)により照明される光学デバイス(4)を含む。光源(1)からの光線の軸と光検出器(3)への後方散乱による光線の軸とは互いに非常に接近し、ほぼ平行又は一致する部分を有する。近接度は目標物(2)と、ほぼ焦点面に位置する基準物(6,8)との間の間隔(相対位置)に相当する。  (もっと読む)
(もっと読む)
341 - 360 / 360
[ Back to top ]