
Fターム[2F112DA06]の内容
Fターム[2F112DA06]に分類される特許
1 - 20 / 53
変位測定方法および変位測定装置
【課題】特異な輝度を持つ画素に影響されない重心位置算出を行い、変位測定の精度を向上する変位測定方法および変位測定装置を得る。
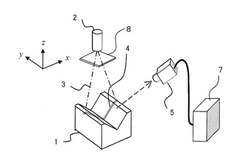
【解決手段】計測対象1にスリット光3を照射するスリット光照射装置2と、スリット光3を計測対象1に照射することによって生成される光切断線4を撮影するカメラ5と、カメラ5により得られた光切断線像から計測対象1の変位を求める画像処理装置7と、を備え、画像処理装置7は、カメラ5により得られた光切断線像の重心位置演算方向の各画素の輝度を最小二乗法で理想的な輝度分布に近似させた後、さらに輝度値と近似値の差分を用いて重み付き最小二乗法で理想的な輝度分布に再近似させ、その分布の期待値から光切断線像の重心位置を算出して計測対象1の変位を求める。
(もっと読む)
変位検出装置

【課題】光源からの光を回折格子が設けられた領域で反射させて、被測定面の変位を検出する変位検出装置を提供する。
【解決手段】変位検出装置1は、光源2と、対物レンズ3と、分離光学系4と、コリメータレンズ7と、非点収差発生部8と、受光部9と、位置情報生成部10と、絞り部材11とを備えている。そして、対物レンズ3から出射され、被測定面に向けて集光される光の光軸に対する角度をθ、光源2の波長をλ、被測定面101に形成された回折格子のピッチをd、回折格子による回折光の次数をnとした場合に、遮蔽部11は、
を満たす反射光を遮蔽する。
(もっと読む)
光学的情報読取装置
【課題】測距処理の高速化を図り、確実に測距を行うことができる光学的情報読取装置を提供する。
【解決手段】光学的情報読取装置1Aは、光の照射領域102aと非照射領域103aが組み合わせられた測距パターン101aを読取対象物に形成する測距光Saを出射する測距光出射部2を備え、読取対象物に形成された測距パターン101aを固体撮像素子3で撮像して測距パターン101aの画像を取得し、画像信号で信号が落ち込む部分を検出して、測距パターン101aの非照射領域103aの座標に基づき測距を行う。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
受光レンズの配置方法、および光学式変位センサ
【課題】光学式変位センサにおいて、測定範囲のどの位置においても、測定を適切に行うことを可能とする受光レンズの配置方法を提供することである。
【解決手段】光学式変位センサ10は、投光モジュール9と、投光モジュール9からの光による測定対象物16からの反射光を受光する受光素子13と、測定対象物16と受光素子13との間に位置して、反射光を受光素子13に結像する受光レンズ14とを備える。測定対象物16で光が反射する位置は、投光モジュール9の光軸L1上において、光源11に近い第一の位置PN1から光源11から離れた第二の位置PF1までの所定の範囲W1である。そして、第一の位置PN1から受光レンズ14に入射する反射光の入射角θ1と、第二の位置PF1から受光レンズ14に入射する反射光の入射角θ2とが、同じ角度になるように、受光レンズ14を配置する。
(もっと読む)
変位検出装置
【課題】対物レンズを正確に変位させることにより、精度の高い測定を行うことのできる変位検出装置を提供する。
【解決手段】変位検出装置1では、対物レンズ3が光源2からの出射光を被測定面101に向けて集光する。被測定面101からの反射光の光路は、分離光学系4により光源2から出射光の光路と分離される。分離光学系4を通った反射光は、集光手段7により集光され、非点収差発生手段8により非点収差が発生した状態で受光部9に入射する。受光部9の直近に設けられた入射光束径調整手段12は、受光部9へ入射する被測定面からの反射光の光束径を調整する。位置情報生成部10は、受光部9で検出した光量から得られるフォーカスエラー信号及びSUM信号を用いて被測定面101の位置情報を生成する。
(もっと読む)
測距装置及びそれを有する光学機器
【課題】 小型でありながら、高い測距精度の測距装置を実現すること。
【解決手段】 互いの光軸が基線長を隔てて配置された一対の結像レンズ102,104と、一対の結像レンズ102,104に対応する一対の開口が設けられた絞り106と、一対の結像レンズ102,104により形成された像を受光して電気信号に変換するセンサ103,106とを有する測距装置101であって、一対の結像レンズ102,104をそれぞれ、1枚の非球面レンズで構成すると共に、各結像レンズのシェープファクター、及び各結像レンズの焦点距離と各開口の基線長方向の長さとの関係を適切に設定する。
(もっと読む)
光センサー
【課題】光学部品の点数を少なく、構造を簡単化して、光センサーの小型化及び低コスト化を実現する。
【解決手段】振動検出用光センサー1は、光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5、及び1個の受光素子6を備える。波長板ユニットは1/4波長板7と振動板8とが一体化され、光センサーの小型化、構造及び組立の簡単化、低コストが図れる。受光素子6は、光軸x2を振動板の反射光の光軸x1と平行にかつ僅かにずらして配置される。それに対応して、受光素子に入射するビームスポット形状は、その中心cを受光面6aの中心Oから僅かにずらして離れた位置に置いて投影される。受光素子から検出される光量は、振動板の変位に対応して増減する。
(もっと読む)
距離測定装置
【課題】アイセーフ波長のレーザ光を用いて低コストかつ高精度に距離を測定する。
【解決手段】レーザ光源24からのアイセーフ波長のレーザ光は、ポリゴンミラー21により走査されつつ測定対象に照射される。測定対象からの光はGLV32へと導かれ、GLV32からの回折光が光検出器35にて受光される。光検出器35は単一のフォトダイオードを備える。GLV32からは可干渉性の強い光のみが光検出器35へと導かれるため、レーザ光に由来する光のみが光検出器35にて検出される。GLV32において回折光を出射する領域を移動することにより、レーザ光に由来する光の入射位置が求められる。これにより、背景光の影響を受けることなく精度よく距離を測定することができる。また、単一のフォトダイオードを用いることにより、アイセーフ波長の光を低コストにて検出することができる。
(もっと読む)
対象物検出装置
【課題】対象物か否かを判断する情報を残しながらも情報量を低減させ、距離画像を用いた対象物の検出における処理負荷を従来よりも低減する。
【解決手段】アクティブ型の距離画像センサ1により距離画像を生成する。背景取得手段2は背景距離画像を記憶し、差分画像生成手段3は、距離画像と背景距離画像とから距離差分画像を生成する。注目画素抽出手段4は、距離差分画像における画素値が存在閾値以上である画素を距離画像から注目画素として抽出し、密度計測手段5では、注目画素を3次元の仮想空間にマッピングし単位体積のブロックごとに注目画素の個数を密度として求める。有効ブロック抽出手段6は、密度が対象閾値以上であるブロックを有効ブロックとして抽出し、領域統合手段7は、隣接する有効ブロックを統合してグループを形成する。対象物判別手段8は、グループのサイズが適正範囲であれば、対象物として判別する。
(もっと読む)
距離画像取得装置
【課題】新たな構成の付加なく、温度変化の影響を受けず高精度距離検出が可能となるよう、基線長変動量を検知する。
【解決手段】被写体に対向するレンズがアレイ配列されステレオレンズペア1',1''を構成するレンズアレイ1と、レンズアレイの像面側に複数のレンズにより結像される被写体の縮小像(個眼像)集合の複眼像を撮像する撮像手段4と、ステレオレンズペアによる個眼像ペアから距離画像を算出する距離画像演算器20と、撮像手段と略平行な平面内、かつステレオレンズペアの配列方向に略垂直の任意一断面において、レンズアレイと接触しレンズアレイを保持する保持部材6と、1つの個眼像ペアの視野を制限する視野制限手段と、視野が制限された個眼像ペアから算出した輝度値と、視野が制限されない個眼像から算出した輝度値との比に基づき、ステレオレンズペアの基線長変動量を検知し、距離画像演算器の距離出力値を補正する演算器を備える。
(もっと読む)
対応点探索装置
【課題】ステレオカメラを用いて得られた2つの画像についての対応点探索処理において、遠近競合を抑制した対応点探索装置を提供する。
【解決手段】ステレオカメラSCで得られた画像データが入力される画像入力部11と、画像入力部11から出力される画像データに対して、解像度変換を行う解像度変換部12と、解像度変換された画像データに対して対応点探索を行うためのポイント設定を行うポイント設定部13と、ポイント設定された画像データに対して多重解像度処理のための視差を設定するための視差設定部14と、ポイント設定された画像データに対して、ウインドウを設定するウインドウ設定部15と、ウインドウが設定された画像データに対して対応点探索処理を実行する対応点探索処理部16とを備えている。
(もっと読む)
測距装置及び測距方法
【課題】測定対象物までの距離の測定精度を向上させる。
【解決手段】LDモジュール11,12は、原点から所定の位置の平面S1上において、z軸を中心とする対称位置に2つの投光スポットP2,P1が形成されるように、光を投光する。カメラ13は、z軸方向に配置された測定対象物上に、LDモジュール11,12が投光することにより形成された2つの投光スポットを受光する。距離取得部14は、原点から4mの位置における投光スポットP1,P2の位置関係と、カメラ13が受光することによって得られた測定対象部上の2つの投光スポットの位置関係を比較し、比較結果に基づいて、原点から測定対象物までの距離を取得する。
(もっと読む)
マルチフォーカス検査装置及びマルチフォーカス検査方法
【課題】 マルチフォーカス検査装置及びマルチフォーカス検査方法に関し、1回のスキャンで高速且つ高精度の全面外観検査を可能にする。
【解決手段】 測定対象物を撮像する測定ヘッドと、前記測定対象物と前記測定ヘッドを平面内において互いに相対的に移動させる移動機構と、前記測定対象物に光を照射する光源とを備え、前記測定ヘッドは、前記測定対象物に対向して配置された撮像レンズと、前記撮像レンズの合焦面が、前記測定対象物の移動方向に対して直交する平面内或いは前記直交する平面から±45°の範囲内で前記測定対象物の移動方向に傾斜させた平面内に存在するように調整する光学部材と、前記光学部材からの光の結像位置に焦点面が位置するよう配置したイメージセンサとを少なくとも有する。
(もっと読む)
物体検知装置
【課題】可動部がなく耐久性や信頼性が高く、広範囲の対象空間を設定することを可能にしながらも投光に要するエネルギーを低減可能な距離センサを提供する。
【解決手段】発光源1は、強度が時間経過に伴って変化する変調光を投光する。演算処理部7は、発光源1による投光から撮像素子2による受光までの時間差に相当する情報を変調光の時間変化と撮像素子2の各受光領域での受光強度とから抽出し、距離を画素の値とする距離画像を生成する。発光源1の前方には、変調光をスリット光として対象空間に投光するスリット光形成部3bと、変調光をスポット光として対象空間に投光するスポット光形成部3cとを備えた投光光学系3が配置される。
(もっと読む)
物体検知装置
【課題】距離センサの視野内にドアが存在する場合でも、監視対象である物体の状態をドアの移動と分離して判断可能にする。
【解決手段】距離センサAは、視野領域に存在する物体までの距離を計測して距離画像を生成する装置であり、ドアにより開閉される開口部の上方に配置され視野領域が下方に設定される。距離センサAの視野領域には、走行駆動されて開口部を開閉するドアが含まれる。領域規定手段9は、ドアが出入する領域を含む第1の監視領域と、ドアパネル間の隙間の領域である第2の監視領域と、開口部の外側で開口部から規定範囲内である第3の監視領域とを規定する。また、領域規定手段9は、ドアの開閉の動作に伴って各監視領域の大きさを変化させる。判断手段10は、各監視領域内における物体の存否を判断し、検知出力手段11は、判断手段10の判断結果に応じた出力信号を外部に出力する。
(もっと読む)
画像認識装置及び車外監視装置
【課題】単純な構成で被写体の三次元画像を撮像し、撮像した画像から距離情報を有する距離画像を求め、求めた距離画像から被写体までの距離を計測する。
【解決手段】画像認識装置1の1つの撮像装置2で入射した光を水平偏光成分の光と垂直偏光成分の光に分離して水平偏光画像と垂直偏光画像を撮像し、撮像した水平偏光画像と垂直偏光画像を画像信号処理装置3で処理して偏光比画像又は偏光差分画像を生成し、生成した偏光比画像又は偏光差分画像から三次元の距離情報を有する距離画像を求め、視差ずれ補正などの処理を不要にして処理の簡略化して三次元の距離情報を得る。
(もっと読む)
物体形状評価装置
【課題】測定装置の測定技術上の条件から、特定の測定領域でその測定誤差が大きくなるような場合においても測定点群と基準点群との合同変換が適正に行われ、その結果、測定対象物の物体形状評価が適正に行われる物体形状評価装置を提供する。
【解決手段】 測定対象物の形状に対応する多数の測定点と、測定対象物の基準形状に対応する多数の基準点との間の距離を逐次収束させる逐次収束処理に基づいて測定点と基準点とを位置合わせし、位置合わせ後の測定点データと基準点データとに基づいて測定対象物の形状を評価する物体形状評価装置。位置合わせ処理において、隣接する前記測定点の間の隣接点間距離又は隣接する前記基準点の間の隣接点間距離に基づいて隣接点間距離重み係数を決定し、当該隣接点間距離重み係数が逐次収束処理における逐次収束評価値を求める際に用いられる。
(もっと読む)
レーザ加工機
【課題】被加工対象物の表面を簡便に且つ迅速に加工可能なレーザ加工機を提供する。
【解決手段】ガルバノスキャナで走査したレーザ光を、テレセントリック型fθレンズで被加工対象物に照射して表面を加工する。ガルバノスキャナの上流側からレーザ光の光軸に沿って光を入射し、被加工対象物の表面で反射してレーザ光の光軸に沿って戻ってきた光を受光することによって、表面までの距離を検出する。こうすれば、ガルバノスキャナの上流側から被加工対象物の表面までの間では、レーザ光の光軸と、距離検出用の光軸とが一致するので、常に正確に、レーザ光の照射位置までの距離を検出できる。その結果、面倒な光軸調整が不要となり、加えて、ガルバノスキャナでレーザ光を走査することで、迅速な加工が可能となる。
(もっと読む)
光学式測距センサおよび電子機器
【課題】小型化され、かつ、計測の精度が高い光学式測距センサおよび該センサを含む電子機器を安価で提供する。
【解決手段】光学式測距センサは、発光素子と同一平面上に設けられた受光素子2を備える。受光素子2は、複数のセル21Aを有し、発光素子1から放射され被測定物で反射した光が集光される受光部21と、受光部21における所定の位置を記憶するフラッシュメモリ部25と、複数のセル21Aによる上記光の検出結果に基づいて、受光部21における上記光の集光位置を検出するとともに、フラッシュメモリ部25に記憶された所定の位置と受光部21における上記光の集光位置との相対的な位置関係に基づいて、被測定物までの距離を計測する信号処理回路部22とを含む。
(もっと読む)
1 - 20 / 53
[ Back to top ]