
Fターム[2F112FA43]の内容
Fターム[2F112FA43]に分類される特許
1 - 20 / 30
空間情報検出装置
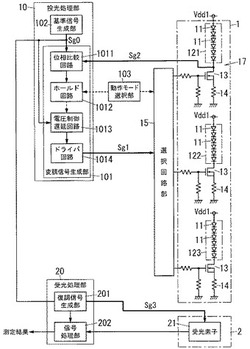
【課題】複数個の発光素子を用いて強度変調光を投光し、かつ投光と受光とのタイミング調整の期間を備える構成で、タイミング調整の期間における消費電力を抑制する。
【解決手段】発光素子11は群121,122,123に分けられ、群121,122,123ごとに設けた通電制御素子13により光出力が制御される。動作モード選択部103は、基準信号Sg0に対する検出信号Sg2の時間差を計測する校正モードと、発光素子11から強度変調光を投光してから受光素子21が受光するまでの時間を計測する測定モードとを選択する。測定モードでは、検出信号Sg2の基準信号Sg0に対する時間差が規定値に維持されるように電圧制御遅延回路1013による遅延時間が設定される。経路選択部15は、校正モードが選択されているときに、発光素子11のうちの1つの群121に対応する通電制御素子13にのみ通電する。
(もっと読む)
画像処理装置および方法、画像処理システム、並びにプログラム

【課題】複数のカメラにより得られる複数の画像の相対的な位置の調整を、経年変化の影響を受けることなく、低コストかつ低レイテンシで行う。
【解決手段】格納処理部は、基準となる基準画像に対して被写体が所定の角度の分ずれている入力画像の画素の画素データをバッファに格納し、読み出し部は、角度の分だけ回転させた場合の入力画像において基準画像に対応する対応領域にある、入力画像の画素の画素データを、バッファから読み出し、画素データ算出部は、読み出し部によって読み出された画素データに基づいて、入力画像を角度の分だけ回転させた回転画像の画素の画素データを算出する。本技術は、例えば、ステレオカメラを備える画像処理システムに適用することができる。
(もっと読む)
ステレオカメラ装置、画像補整方法
【課題】行毎の撮影時刻が異なる撮像素子を利用したステレオカメラにおいて、光軸ずれによる画像の位置ずれだけでなく、動体歪みも補正することが可能なステレオカメラ装置を提供すること。
【解決手段】2つの画像の相関度から被写体との距離情報を検出するステレオカメラ装置100であって、行と列に配列された画素のうち行毎の撮影時刻が異なる撮像素子C0,C1が2つ配置された画像撮影手段200と、2つの撮像素子の相対的な位置ずれ量を検出する位置ずれ検出手段12と、前記位置ずれ検出手段が検出した垂直方向の前記位置ずれ量に応じて、2つの前記撮像素子の一方の撮影開始時刻を変更する開始時刻変更手段13と、2つの前記撮像素子が撮影した2つの画像の一方を、垂直方向の前記位置ずれ量と同程度、垂直方向に平行移動させる補正手段11と、を有することを特徴とする。
(もっと読む)
光電センサ並びに物体検出及び距離測定方法
【課題】複数のパルスを発射する度に統計分析を行い、ノイズに強い角度分解的な距離測定に応用する。
【解決手段】監視領域に存在する物体の検出及び距離測定するレーザスキャナでり、多数の互いに連続した個別光パルスを出射する発光器、発射光線を周期的に偏向回転可能な偏向ユニット、前記偏向ユニットの角度位置信号を生成する角度測定ユニット、物体により直反射又は拡散反射された受信パルスを生成する受光器、及び、多数の受信パルスを時間的なヒストグラムにまとめ、該ヒストグラムに基づいて物体までの光通過時間を求め、該時間から物体の距離測定値を確定する解析ユニットを備える光電センサにおいて、前記解析ユニットが、その都度の角度位置信号に基づいて受信パルスのグループを選択し、それをヒストグラムにまとめ該グループのヒストグラムに基づいて確定された物体の距離に関する測定値を前記角度位置信号により表される検出角度に割り当てる。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
距離センサ
【課題】位相方式の距離センサにおける適切な距離レンジへの切り替えを実現すること。また、適切な距離レンジの検出を可能とすること。更に、送信波と反射波との位相差の正確な検出を可能とすること。
【解決手段】距離センサ100は、送信信号VTを「参照信号」とし、受信信号VRを「計測信号」とする2位相ロックインアンプ20を有して構成され、この2位相ロックインアンプ20によって、送信信号VTと受信信号VRとの位相差φが算出される。そして、距離計測を行う際には、先ず、分周器4の分周比Nを最大値Nmaxに設定し、このときに算出した測定距離Lxに応じて分周器4の分周比Nを最適な分周比Nに変更した後、再度、測定距離を算出する。
(もっと読む)
距離センサ
【課題】距離センサにおいて、簡単な構成により、処理する信号の周波数帯域を抑えることによる低コスト化と測定精度の向上または維持を図る。
【解決手段】距離センサ1は、第1、第2の周波数の信号を生成する第1、第2のシンセサイザ11,12と、第1の周波数の信号を第2の周波数でサンプリングしてスタート信号を出力するサンプルホールド回路3と、第1の周波数でパルス化した信号波を送信する投光器4と、反射して戻ってくる信号波を受信して受信信号を出力する受光器5と、受信信号を第2の周波数でサンプルホールドした信号に基づいてストップ信号を生成して出力する比較判断回路6と、スタート信号の出力からストップ信号の出力までの経過時間に基づいて対象物Mまでの距離を演算する計数演算器7とを備える。比較判断回路6は、等価サンプリングとサンプルホールドとにより、システムの低速動作が可能とされる。
(もっと読む)
レーザーの試験をすることに光学的なアイソレーターを使用するためのシステム及び方法
一つの実施形態に従った、方法は、パルス検出器で第一の光学的な信号を受信することを含む。第一の光学的な信号の電子的なパルスは、光学的なモジュールで受信される。第二の光学的な信号は、電子的なパルスに基づいた光学的なモジュールで発生させられる。第一の光学的な信号の少なくとも一部分は、光学的なイソレーターで逆の方向において受信されると共に、第二の光学的な信号は、光学的なアイソレーターで前進の方向において受信される。光学的なアイソレーターは、実質的に、前進の方向においてターゲットまで第二の光学的な信号を送信する。光学的なアイソレーターは、実質的に、逆の方向において第一の光学的な信号の少なくとも一部分を減衰させる。 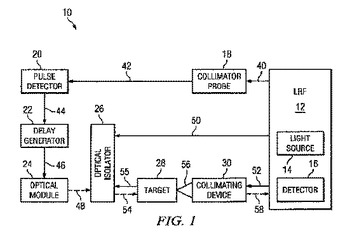 (もっと読む)
(もっと読む)
距離測定方法、距離測定システム及び距離センサー
【課題】距離測定方法を提供する。
【解決手段】距離測定方法は、複数の変調位相オフセットで複数の積分信号を測定する段階と、複数の変調位相オフセットのうちから他の一つの積分信号に対する受信時間を調節するために、複数の変調位相オフセットのうちから少なくとも一つに対する少なくとも一つの積分信号をそれぞれ推定する段階と、推定された少なくとも何れか一つの信号によってターゲットと受信器との距離を決定する段階と、を含む。
(もっと読む)
距離測定装置及び距離測定方法
【課題】測定装置内部の遅延回路の変動を相殺し、高精度でかつ高速測定が可能な距離測定装置及び方法を実現する。
【解決手段】パルス的に発光する光源部10から、第1基準光r1、第2基準光r2、測定送信光mtを分岐し、光学的変化が略生じない第1参照光路R1を伝播させた第1基準光r1、光学的遅延発生部50が挿入された第2参照光路を伝播した第2基準光r2、測定送信光を測定対象物160に照射して反射して戻ってきた測定受信光mr間の検出時間差を測定することによって測定対象物160との距離を測定する装置及び方法であって、測定受信光mrと第1基準光r1が時間的に分離している場合は、両者の検出時間差から距離を算出し、測定受信光mrと第1基準光r1が時間的に分離していない場合は、第1基準光r1と第2基準光r2の検出時間差Tdと、測定受信光mrと第2基準光r2の検出時間差Td’から距離Lを算出する。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、画像処理部10は、パルス光を投光せずに自車両前方を撮像した外乱光ノイズ除去用のフィルタ画像に基づいて、各撮像画像の輝度を補正する。
(もっと読む)
距離測定装置
【課題】距離測定装置において、光の放射タイミングと受光タイミングとの相対誤差をフィードバック制御するにあたって、広い制御範囲に高い安定性を得る。
【解決手段】発光素子27から変調赤外線を放射し、測定対象物15からの反射光を受光素子27において複数の期間に分割して受光し、評価演算回路38が各期間の受光量から発光と受光との時間差を求め、前記測定対象物15の距離情報を測定する距離測定装置10において、相対的に遅延の小さい受光装置30側では、タイミング信号発生回路35と駆動回路36との間に固定遅延回路39を設けて前記相対誤差を粗調整する。発光装置20側には、駆動回路26の前段に遅延時間調整回路28を設けるとともに、位相比較回路19を設け、発光装置20と受光装置30との駆動信号間の位相差に対応したエラー信号で前記遅延時間調整回路28が前記相対誤差を微調整する。
(もっと読む)
変位センサ
【課題】複数の測定対象物の測定が可能な変位センサを提供すること。
【解決手段】コントローラ10は、トリガが発生する毎に、サンプルトリガ蓄積数分の測定データを第1の記憶回路13に記憶するとともにデータアドレスをカウントアップする。トリガ発生毎に測定データを第1の記憶回路13に記憶することで、複数の測定対象物の高さの測定が可能となる。データアドレスはトリガの発生回数に対応する。従って、データアドレスに基づいてトリガの発生回数、即ち測定対象物の数をカウントすることが可能となる。
(もっと読む)
レーザレーダ装置
【課題】装置の小型化を実現することができるようにする。
【解決手段】レーザ光源18によってレーザ光を照射し、照射されたレーザ光が、2焦点レンズ16の中央部分16Aを透過する。2焦点レンズ16の中央部分16Aを透過したレーザ光は、測定領域内の対象物で反射し、反射光が、2焦点レンズ16の周辺部分16Bによって焦点位置に集光される。そして、焦点位置を含む所定領域内に配置された受光素子22によって、反射光が受光される。
(もっと読む)
駆動回路
【課題】負荷のリアクタンス成分の変動によって負荷を駆動するための出力の立上り時間が変動した場合であっても負荷の動作が変動するのを抑制する。
【解決手段】負荷Aの容量値が変動した場合、駆動回路1の傾き調整回路6は、電流制御回路50,51のpMOS52及びnMOS53に印加するゲート電圧を調整し、pMOS52及びnMOS53の各ソース−ドレイン間に流れる電流を調整する。つまり、出力ドライバ4のCMOS回路40を構成するpMOS41及びnMOS42のそれぞれのオン時にpMOS41及びnMOS42の各ソース−ドレイン間に流れる電流を調整する。これにより、出力ドライバ4と負荷Aとの間に流れる電流を制御し、負荷Aの容量成分を充放電させる時間を制御するため、負荷Aの駆動電圧の立上り及び立下りの傾きを補正し、上記駆動電圧の立上り時間及び立下り時間を一定時間にする。
(もっと読む)
パルス反射混合法を用いた手持ち式レーザ距離測定器
【課題】パルス反射混合法において測定時間をより的確に利用することにより、手持ち式レーザ距離測定器の感度ひいては測定範囲を向上させる。
【解決手段】制御手段2によって制御可能な少なくとも1つの遅延回路9a,9bが設けられており、該遅延回路9a,9bが、局所発振器8と、光検出器10および/または送光器12との間に配置されており、測定パルス4および基準パルス6を走査するために、走査パルス11と送信パルス7との間に遅延を発生させる。
(もっと読む)
測距装置及び測距方法
【課題】ノイズの影響を受けにくく、撮像素子を駆動するための回路も簡単にすることができ、CPUへの負荷を低減することができる測距装置を提供する。
【解決手段】発光部26と、発光部26から出射される光を強度変調して第1変調光12A〜第4変調光12Dとして出射させる発光制御部28と、第1変調光12A〜第4変調光12Dの基準時から照射開始時までの時間的長さを制御する開始時間制御部64とを有する発光手段14と、第1変調光12A〜第4変調光12Dにより照射された被検出物16からの反射光18を受光する受光手段20と、第1変調光12A〜第4変調光12Dと反射光18の位相差から被検出物16までの距離を算出する演算手段22とを有する。受光手段20は、照射開始時を基準として一定周期ごとに設定された露光期間において反射光18の光量をサンプリングする。
(もっと読む)
ステレオ画像処理装置
【課題】故障診断用のデータを記憶するメモリ容量を低減し、コスト低減を図りつつ診断効率を向上する。
【解決手段】システム監視部30がテストデータ記憶部40のトレーニングデータをデータセレクタ5a,5bを介してマッチング回路部10の画像補正部11a,11bに入力し、診断を行う。トレーニングデータは、1フレーム中の縦4ライン分だけのデータを左右画像に対して用意し、縦4ライン分のトレーニングデータを縦方向に繰り返し使用して1フレーム分の診断を行う。マッチング回路部10で処理されたデータとテストデータ記憶部40のデータとを比較し、両者が一致すれば正常動作と判定し、両者が一致しない場合、異常発生と判断する。これにより、1フレーム全体の教師データが不要になり、メモリ容量を小規模化し、コストを低減することが可能となる。
(もっと読む)
反射性対象に対する距離を求めるための方法及び装置
【課題】 温度及び外部光の影響が著しい場合であっても、距離ゼロからの距離測定が可能な、反射性対象に対する距離を求める方法及び装置の提供。
【解決手段】 送信信号の少なくとも1つの部分区間にわたって積分された送信信号(2.2)の結果としての電気的信号(2.5)が、夫々、少なくとも1つの時間的に隣接し少なくとも1つの部分区間にわたって積分された基準信号(2.1、2.3)の結果としての電気的基準信号と比較されること、比較器(1.19)の出力端(1.19c)に、送信信号(2.2)の及び/又は基準信号(2.1、2.3)の振幅値を調整するための制御値(1.29)が生成され、該制御値によって電気的信号(2.5)の振幅と電気的基準信号(2.4、2.6)の振幅は少なくとも比較器(1.19)の入力端(1.19a、1.19b)において実質的に同じ大きさであること、このように調整された状態において、クロック変化の際に生成し送信光源(1.8)から対象(1.26)及び受信器(1.10)への光伝搬時間に対応するクロック変化信号の振幅が、電気的信号(2.5)と電気的基準信号(2.4、2.6)の間及び/又は電気的基準信号(2.4、2.6)と電気的信号(2.5)の間で検出されること、及び更なる比較器(1.16)において、クロック変化信号(複数)の振幅(複数)が互いに対し比較されて又はクロック変化信号の振幅が当該光伝搬時間に依存しない振幅値と比較されて差値(1.27)として求められ、該差値が制御ユニット(1.2)によって消去ないし少なくとも最小にされることを特徴とする。
(もっと読む)
固体撮像装置、カメラ、車両及び監視装置
【課題】距離情報を高精度かつ効率よく算出することができ、ノイズに対する耐性の高い固体撮像装置を提供する。
【解決手段】本発明に係る固体撮像装置は、第1撮像領域115と第2撮像領域116とを含む領域に行列状に配置された複数の光電変換素子111を備える撮像部110と、第1撮像領域115へ光を入射させる第1光入射部150と、第1光入射部150と離間して設けられ、第2撮像領域116へ光を入射させる第2光入射部151と、第1撮像領域115により光電変換された信号電荷を電圧又は電流に変換し第1映像信号として出力し、第2撮像領域116により光電変換された信号電荷を電圧又は電流に変換し第2映像信号として出力する出力部114と、第1映像信号及び第2映像信号から、被写体160までの距離に関する情報を算出する算出部120とを備え、撮像部110と、出力部114と、算出部120とは、同一の半導体基板に形成される。
(もっと読む)
1 - 20 / 30
[ Back to top ]