
Fターム[2F129AA10]の内容
航行(Navigation) (246,646) | 航行体 (14,848) | 宇宙航行体 (27)
Fターム[2F129AA10]に分類される特許
21 - 27 / 27
インターフェロメトリック・センシングシステム
一例示のナビゲーションシステムは、移動体の第1のセンサを有する、第1のロケーションにおけるマスタナビゲーションコンポーネントと、移動体の物理的変形により第1のロケーションに対する変位が可変である第2のロケーションにおける第2のセンサを有するスレーブナビゲーションコンポーネントとを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントが、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。変形特性に基づくたわみモデルは、動的変位を計算する。誤差推定器が、変位情報に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブナビゲーションコンポーネントの補正されたナビゲーション測定データを、その座標系におけるナビゲーション測定データに変換し、補正されたナビゲーション測定データに基づく第2のセンサの出力を、第1のセンサの出力と結合して、結合結果にする。 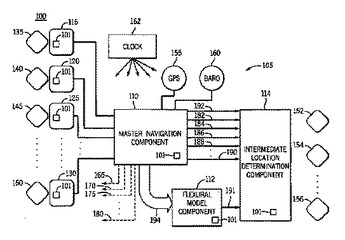 (もっと読む)
(もっと読む)
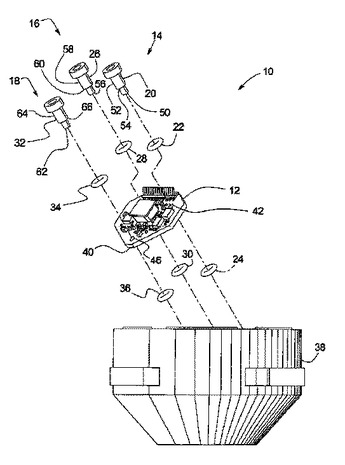
動的なCMGアレイおよび方法
コントロール・モーメント・ジャイロ(CMG)(10)の故障、あるいはスペースクラフト(S/C)質量特性またはミッションの変更を補償するようにCMG(10)を姿勢変更するための方法および装置が提供される。改良型のCMG(10)は、CMG(10)をCMGジンバル軸と平行でない軸(18)のまわりで回転させるための駆動手段を備える。CMGアレイ姿勢変更中を除いて、解除可能なクランプが、CMG(10)をスペースクラフトに固定する。CMGアレイ(50)は、姿勢センサ(102)、コマンドモジュール(104)、データおよびプログラムを格納するためのメモリ(108)、(好ましくは各CMG軸(18、22、30)ごとの)CMG駆動装置(112)およびセンサ(114)、ならびにこれらの要素を結合する制御装置(116)と組み合わされる。この方法は、CMG(10)が故障し、あるいはS/C特性またはミッションが変化したかどうか決定するステップ、アレイの作動中のCMG(10)を識別するステップ、スペースクラフト制御の向上のために新しいアレイ姿勢変更を決定するステップ、アレイのCMG(10)を解除し、姿勢変更し、再び固定するステップ、および新しいアレイ姿勢のためにS/C制御パラメータを更新するステップを備える。 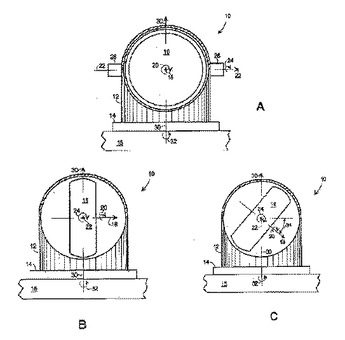 (もっと読む)
(もっと読む)
加速度計およびGPS受信機を用いた発射体の誘導
発射体には、その本体の直交座標系があることを特徴とする、ジャイロを持たない発射体誘導システム。この発射体には、3軸の加速度計があり、x、y、およびz軸に沿って測定したx、y、およびz加速度データを提供する。GPSアンテナおよび受信機手段は、機内に搭載したGPSからの位置および速度データを、地球の基準航行座標系で提供する。コンピュータおよびプログラム手段は、時間インデックス付きのGPS位置データおよびGPS速度データを記憶し、またそれにアクセスし、さらに、x、y、およびz軸加速度データを、本体座標系から航行座標系へと変換する。プログラム手段は、対応する時間インデックス付き加速度データと、GPS速度データおよび位置データとに応答し、推定した発射体のロール角、ピッチ角、およびヨー角を、最適なスムージング技術を用いて、現在位置の時間インデックスが繰り返されるたびに、その局所レベルに関して計算し、発射体を所定の位置に誘導する飛行制御システムに出力する。 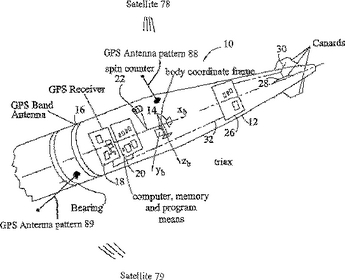 (もっと読む)
(もっと読む)
相互補完ナビゲーションシステム
【課題】移動体における相互補完ナビゲーションシステムを提供する。
【解決手段】ネットワークコンポーネントは、第1と第2のナビゲーションコンポーネントの間の函数関係を決定。函数関係は、第1のナビゲーションコンポーネントによって第2のナビゲーションコンポーネントのためのナビゲーションソリューションを記述。ヘルスモニタは、第2のナビゲーションコンポーネントのためのヘルスインジケータを決定。第2のナビゲーションコンポーネントは、ヘルスインジケータが健全なことを示すとき、第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。ネットワークコンポーネントは、ヘルスインジケータが健全でないことを示すとき、第1ナビゲーションコンポーネントによって第2のナビゲーションコンポーネントの動きを記述する函数関係に基づいて第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。
(もっと読む)
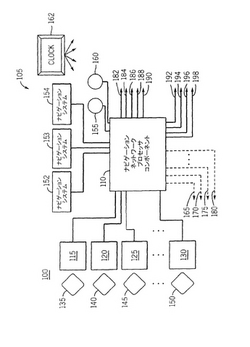
複数のナビゲーションコンポーネントの整合システム及び方法
一例示のナビゲーションシステムが、移動体(105)の第1のロケーションにおけるマスタナビゲーションコンポーネント(110)と、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネント(115)とを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントが、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器が、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブの補正されたナビゲーション測定データを変換する。一例示のナビゲーションシステムは、移動体の第1のロケーションにおけるマスタナビゲーションコンポーネントと、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネントとを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントは、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器は、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブナビゲーションコンポーネントの補正されたナビゲーション測定データを、その座標系におけるナビゲーション測定データに変換する。 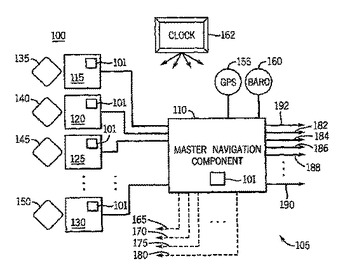 (もっと読む)
(もっと読む)
ナビゲーション装置
誤差数cmの範囲で移動体の現在位置を示すことができるナビゲーションシステムを提供する。 ナビゲーション装置100は、車両等の移動体に備えられたカメラにより得られる現実の映像に基づき、当該移動体から観察される範囲における映像的な特徴点の三次元座標を含む所定の三次元情報を予め生成する特徴点三次元地図生成装置110と、その所定の三次元情報を記録した記録媒体120と、移動体に備えられたカメラにより得られる現実の映像を、記録媒体120に記録された所定の三次元情報と比較し、現実の映像と一致する三次元座標上の地点と方向を求め、移動体に備えられたカメラの三次元座標上の位置,速度,加速度,視点方向,3軸回転姿勢,3軸回転速度,3軸回転加速度等の所定項目を出力,表示する地点検索ナビゲーション装置130とを備えている。 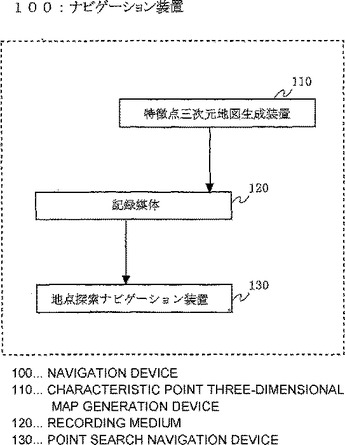 (もっと読む)
(もっと読む)
慣性センサアセンブリの弾性振動および衝撃絶縁
慣性センサシステムは、ベース、慣性センサ、および絶縁装置装着具を有する。絶縁装置装着具は、慣性センサをベースに固定し、絶縁装置装着具は、ボルトと、第1および第2振動吸収部材とを含む。ボルトは、慣性センサおよびベースを通して挿入され、第1振動吸収部材が、ボルトと慣性センサとの間にあり、第2振動吸収部材が、慣性センサとベースとの間にある。絶縁装置装着具が、ベースを通してホストシステムから伝播する振動、衝撃および/または音響雑音から慣性センサを絶縁する。
 (もっと読む)
(もっと読む)
21 - 27 / 27
[ Back to top ]