
Fターム[2G021AC11]の内容
Fターム[2G021AC11]に分類される特許
1 - 20 / 49
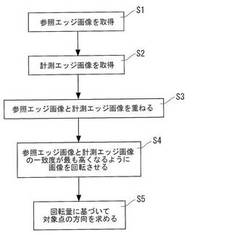
回転体の対象点方向計測方法と装置
【課題】回転体を、その軸方向一端側から回転軸方向に撮像して得た画像において対象点とその背景とが互いに対して識別しにくい場合であっても、対象点の方向を計測できるようにする。
【解決手段】ステップS1で、回転体の参照エッジ画像を予め取得する。ステップS2で、回転体を撮像した画像から計測エッジ画像を取得する。ステップS3で、参照エッジ画像と計測エッジ画像とを、中心同士が一致するように重ねる。ステップS4で、参照エッジ画像と計測エッジ画像との一致度が最も高くなる位置へ、計測エッジ画像と参照エッジ画像を、回転軸回りに互いに対して相対回転させる。ステップS5で、ステップS3で計測エッジ画像と重ねられた参照エッジ画像における既知の対象点の方向と、ステップS4で行った相対回転の量とに基づいて、ステップS2の撮像時における回転体の対象点の方向を求める。
(もっと読む)
回転体のアンバランス修正加工方法

【課題】アンバランス量が1箇所ついて除去加工できる最大量を超えた場合であっても、アンバランスについて解消を可能とすること。
【解決手段】回転体2に取り付けられた除去対象部1について、加工部4aによって1回以上除去加工することによってアンバランスを除去する回転体アンバランス修正加工方法であって、回転体2の回転軸3からアンバランスの測定方位に向けて延びる仮想半直線を第1半直線とし、第1半直線を両側に0度以上90度未満傾けた半直線をそれぞれ第2半直線及び第3半直線とした場合に、第2半直線及び第3半直線と除去対象部1の外周とが交わる2交点のうち一方の交点において加工部4による除去加工を行い、そこから他方の交点まで、加工部4aの中心と回転軸3との距離を一定に保ちながら円弧状に除去加工を行う。
(もっと読む)
バランス修正装置と方法
【課題】回転体における軸方向端部のナット以外の部分を除去加工して、回転体のバランスを修正できるようにする。
【解決手段】回転体に存在するアンバランスの周方向位置に、前記回転翼が位置している場合に、当該アンバランスを、前記回転翼が位置していない複数の周方向位置におけるアンバランス成分に分解する。その後、複数の周方向位置の各々において、対応する前記アンバランス成分に相当する量だけ、前記翼結合部を除去する。
(もっと読む)
回転体把持装置
【課題】アンバランス計測時には、翼構造部の回転翼を回転駆動した駆動ガスの昇圧を抑制することができ、アンバランス修正のための除去加工時には、翼構造部を把持して回転体が回転しないようにする。
【解決手段】駆動装置23は、把持ユニット19を、翼構造部8に軸方向に対向する対向位置に移動させることで、把持ユニット19が翼構造部8を把持可能となり、排気流路形成体21を前記対向位置に移動させることで、排気流路形成体21に形成した排気流路内に、回転翼7を駆動した駆動ガスが軸方向に流入するようになっている。
(もっと読む)
ホイールバランス測定装置
【課題】 構成を簡素化し、騒音の低減を図ることができるホイールバランス測定装置を提供する。
【解決手段】 ハウジング2内の上部領域に電動モータ12を設置し、その回転を下部領域に設けられる回転伝達手段16を介して回転軸7に伝達する。上部領域3を防爆構造要求高さHよりも上方に選ぶことによって、電動モータ12および偏心量測定手段8などの電気的構成を防爆構造とする必要がなくなり、構成が簡素化される。また電動モータ12および回転伝達手段14は支持体15,16によって支持され、これらの支持体15,16は緩衝部材を介してハウジングに連結し、これらの緩衝部材によって振動を吸収し、騒音を低減する。
(もっと読む)
バランサー
【課題】 アンバランス測定時において、コンプレッサハウジングを適切な位置に維持し、正しい測定結果を得ること。
【解決手段】 回転体2とコンプレッサハウジング5を有する過給機1において、アンバランスの方位と量を測定するバランサーであって、回転体2の回転数又は回転角を計測する回転検出センサ34と、回転体2の振動特性を計測する加速度ピックアップ16と、コンプレッサハウジング5を過給機1に接続又は離脱させるサーボモーター31と、回転検出センサ34の計測結果及び加速度ピックアップ16の計測結果に従って、コンプレッサハウジング5の設置位置についてサーボモーター31に指示を与える位置制御装置36と、を有し、サーボモーター31は、回転体2の回転時において、コンプレッサハウジング5を設置位置に維持する。
(もっと読む)
回転装置における振動振幅および位相検出方法、回転装置における振動振幅および位相検出装置
【課題】コストを抑制しつつ回転体の振動振幅および位相の検出精度が向上する回転装置における振動振幅および位相を検出する方法、回転装置における振動振幅および位相検出装置を提供すること。
【解決手段】本発明の回転装置における振動振幅および位相検出方法は、略円盤状の回転体の円盤面に対向して配置された回転検出部に1つ設けられた検出手段により前記回転体の前記回転検出部に対向する面に周方向に設けられた複数の検出領域を検出し、前記回転体を回転させて、前記検出領域と前記回転体の周方向についての当該複数の検出領域の間の領域である無検出領域との複数の境界を基準とする前記回転体の1回転あたりの振動を検出し、検出された前記複数の境界を基準とする前記回転体の1回転あたりの振動をもとに振動振幅および位相を演算すること、を特徴とする。
(もっと読む)
試し錘取付方位算出装置と方法
【課題】回転体の所定部分に対する試し錘の取付方位と、回転体の検出回転角とを正確に対応付けられる手段を提供する。
【解決手段】回転体11の所定部分に対する試し錘の取付方位と、回転体の検出回転角とを対応付ける対応角度情報を取得する対応角度情報取得装置20。所定部分11aには、回転中心C周りの周方向における所定の基準点を基準として試し錘が取り付けられる。回転体11の回転角を検出する角度センサ7と、角度センサ7の検出回転角が所定値となる回転姿勢にある所定部分11aを、軸方向から撮像する撮像装置23と、撮像装置23により得た画像において、既知である所定方位に対する、基準点の方位のずれ角を特定する画像処理部と、を備える。所定値およびずれ角を対応角度情報とする。
(もっと読む)
アンバランス測定方法
【課題】外乱が振動検出に影響を及ぼすことを抑制して再現性の良いアンバランスデータを生成できるようにする。
【解決手段】回転体のアンバランス測定方法であって、回転可能に支持体に支持された回転体を回転駆動する駆動ステップS1と、回転体の回転駆動を停止する停止ステップS2と、回転体の回転駆動を停止した状態で、回転体の回転角を検出しつつ、支持体の振動を検出する検出ステップS3と、検出ステップで得た検出回転角と検出振動に基づいて、回転体のアンバランスデータを生成するデータ生成ステップS4と、を有する。
(もっと読む)
バランス修正装置
【課題】回転体のバランス修正装置において、その軸方向寸法を抑え、支持体に対する回転体の着脱作業の能率を飛躍的に向上させる。
【解決手段】回転体9を回転可能に支持する支持体と、支持体に支持された回転体9の一部をバランス修正のために切削する切削装置15と、切削の時に、回転体9が回転しないように回転体9の一端部9aを把持する把持装置17とを備える。把持装置17は、回転体9の軸方向と交差する交差方向において、一端部9aを把持できる把持準備位置と把持準備位置から外れた退避位置との間で、移動可能である。
(もっと読む)
回転機械支持装置
【課題】流路形成体を交換する場合に、振動特性の変化を防止し、短時間で交換できるようにする。
【解決手段】回転機械1の回転アンバランス検査を行うために回転機械1を支持する回転機械支持装置10。回転機械1は、タービン翼3を有する回転体4を備える。回転機械支持装置10は、タービン翼3を内部に収容するタービンハウジング6と、静止側部材8を支持する支持体15と、を備える。タービンハウジング6は、タービン翼3を回転駆動する流体を流す流路14aが形成された流路形成体14を有する。流路形成体14は、支持体15の内部に取り付けられる。支持体15の内部から流路形成体14を取り出すための取出穴15aが、静止側部材8と反対側にて、支持体15に形成されている。
(もっと読む)
エンジンバランス測定装置
【課題】アンバランス修正や、エンジンの生産管理基準として有用なアンバランス量を測定することのできるエンジンバランス測定装置を提供する。
【解決手段】測定部10と、測定部10に設置されたエンジン100を所定の回転数で駆動する駆動部20と、を備えており、測定部10は、水平に配置された基台11と、基台11の上面側に配置され、エンジン100を取付けるために水平に配置された架台12と、基台11と架台12との間に設置された少なくとも一つの荷重センサ手段40と、荷重センサ手段40からの入力信号に基づきエンジン100のアンバランス量を算出する制御装置200と、を有し、架台12は、エンジンを架台上に保持するために、架台の上面に互いに離隔して配置して設置された少なくとも3つの支持台70を備えており、荷重センサ手段40は、支持台70の架台12に対する設置位置又は設置位置に近接した位置に対応して配置される。
(もっと読む)
アンバランス計測装置
【課題】回転体の回転数の変化を小さくでき、高精度に回転体のアンバランスを計測することが可能なアンバランス計測装置を提供する。
【解決手段】回転体10を回転可能に支持する軸受41、41X、41Yが、半円又はU字形状であり、支持部4は、回転体10の回転軸11に向けて気体を噴出する噴出口90a、41cを有し、軸受41、41X、41Yが、回転軸11を中心にして回転軸11の両側に一対の磁石90を備えることを特徴とするアンバランス計測装置。
(もっと読む)
影響係数取得方法
【課題】試し錘を使用することなく、精度のよい影響係数を取得する。
【解決手段】回転体の回転バランス変化に対する回転体の振動変化を示す影響係数を取得する影響係数取得方法。回転体が回転している状態で、回転体を支持する支持体の振動を計測することで第1の振動データを取得する第1振動データ取得ステップS1と、回転体の一部を切削することで、回転バランス変化を回転体に与える切削ステップS2と、回転体が回転している状態で、支持体の振動を計測することで第2の振動データを取得する第2振動データ取得ステップS3と、第1の振動データと、切削ステップで与えた回転バランス変化と、第2の振動データとに基づいて、回転体の影響係数を算出する係数算出ステップS4と、を有する。
(もっと読む)
アンバランス計測方法と装置
【課題】軸受と潤滑油との温度差に影響されず、かつ、回転機械の個体毎にアンバランスデータがばらつくことなく、高精度なアンバランスデータを取得する。
【解決手段】回転体を回転駆動させる試運転を複数回行い(ステップS1)、各試運転毎に、データ取得ステップS2、ずれ量算出ステップS3、および判断ステップS4を行う。データ取得ステップS2では、支持体の振動と回転体の回転角を検出し、かつ、振動と回転角から前記回転体のアンバランスデータを算出する。ずれ量算出ステップS3では、試運転のアンバランスデータが、この試運転の直前に行った試運転のアンバランスデータからずれている量を表したずれ量を算出する。判断ステップS4では、ずれ量がしきい値以下であるかを判断する。ずれ量がしきい値以下になるまで、ステップS1〜S4を繰り返す。
(もっと読む)
釣合い試験機
【課題】種類の異なる被試験体を効率よく試験することが可能な釣合い試験機を実現する。
【解決手段】空圧ポンプ8によって、基台2の上面部21と支持架台3の下面部31との間に圧縮空気を供給して、基台2の上面と支持架台3の下面の接触面積を低減させたり、基台2の上面と支持架台3の下面とを離間させたりすることにより、基台2と支持架台3との間の摩擦力を軽減させて、より小さな力で基台2上の支持架台3をスムーズに移動させることを可能にすることで、被試験体Kの種類やサイズに応じて速やかに支持架台3の配置を調整し、様々な被試験体Kに対する釣合い試験を行うことを可能にした。
(もっと読む)
回転バランス修正装置及び方法
【課題】より精度良く修正対象部の修正加工を行うことが可能な回転バランス修正装置を提供する。
【解決手段】N極とS極に2分して着磁された回転軸の軸端面に対向して設置された磁気センサと、高速回転体を高速回転可能に支持する回転支持体に設置された加速度センサと、磁気センサ及び加速度センサの出力信号に基づいて、修正対象部の修正量及び修正角度を算出するバランス演算処理部と、修正角度を基に前記回転軸の回転角を位置決めした後、修正量を基に修正対象部を修正加工するバランス修正加工部と、位置決めの原点基準となる原点基準信号を生成する基準信号生成部とを備え、バランス演算処理部は、磁気センサの出力信号と前記原点基準信号との位相ずれ量を求め、バランス修正加工部は、修正角度及び前記位相ずれ量に基づいて前記回転軸の回転角の位置決めを行う。
(もっと読む)
回転バランス修正装置及び方法
【課題】より精度良く修正対象部の修正加工を行うことが可能な回転バランス修正装置を提供する。
【解決手段】N極とS極に2分して着磁された回転軸の軸端面に対向して設置された磁気センサと、高速回転体を高速回転可能に支持する回転支持体に設置された加速度センサと、磁気センサの出力信号及び加速度センサの出力信号に基づいて、修正対象部の修正量及び修正角度を算出すると共に、磁気センサの出力信号に含まれるオフセット量を算出するバランス演算処理部と、修正角度を基に回転軸の回転角を位置決めした後、修正量を基に修正対象部を修正加工するバランス修正加工部と、磁気センサの出力信号に前記オフセット量を加算する加算部と、オフセット量加算後の磁気センサの出力信号からバランス修正加工部による位置決め前の回転軸の原点復帰に必要な原点基準信号を生成する基準信号生成部とを備える。
(もっと読む)
回転バランス修正装置及び方法
【課題】低コストで修正対象部の回転軸に対する固定方位を検出することができ、その固定方位に応じた補正を行うことで所望の切削量を実現して正確な回転バランス修正を行う。
【解決手段】N極とS極に2分して着磁された回転軸の軸端面に対向して設置された磁気センサと、高速回転体を高速回転可能に支持する回転支持体に設置された加速度センサと、磁気センサ及び加速度センサの出力信号に基づいて、修正対象部の修正量及び修正角度を算出するバランス演算処理部と、修正角度を基に前記回転軸の回転角を位置決めした後、修正量を基に修正対象部を修正加工するバランス修正加工部とを備え、バランス演算処理部は、回転軸の軸端面における着磁方位と修正対象部の回転軸に対する固定方位との関係に応じて修正量と修正角度の少なくとも一方を補正する。
(もっと読む)
回転バランス修正装置及び方法
【課題】より精度良く修正対象部の修正加工を行うことが可能な回転バランス修正装置を提供する。
【解決手段】N極とS極に2分して着磁された回転軸の軸端面に対向して設置された磁気センサと、高速回転体を高速回転可能に支持する回転支持体に設置された加速度センサと、磁気センサの出力信号及び加速度センサの出力信号に基づいて、修正対象部の修正量及び修正角度を算出するバランス演算処理部と、修正角度を基に回転軸の回転角を位置決めした後、修正量を基に修正対象部を修正加工するバランス修正加工部と、磁気センサの出力信号からオフセット成分を抽出するローパスフィルタと、磁気センサの出力信号にローパスフィルタにて抽出されたオフセット成分を加算する加算部と、オフセット成分加算後の磁気センサの出力信号からバランス修正加工部による位置決め前の回転軸の原点復帰に必要な原点基準信号を生成する基準信号生成部とを備える。
(もっと読む)
1 - 20 / 49
[ Back to top ]