
Fターム[2H040BA15]の内容
Fターム[2H040BA15]に分類される特許
1 - 20 / 72
内視鏡システム及び画像生成方法
【課題】表層微細構造や肥厚などの生体組織上の凹凸の視認性を向上させる。
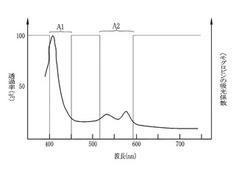
【解決手段】励起光ELを蛍光体に当てて白色光Wを励起発光させる。白色光のうち血中ヘモグロビンの吸光係数が高い高吸光波長域A1,A2の成分を、高吸光波長除去フィルタで除去して高吸光波長カット光を生成する。この高吸光波長カット光を被検体に照明し、その反射光の像光をカラーのCCDで撮像する。CCDのB画素から出力される信号Bpに基づき微細構造画像を生成する。この微細構造画像は、表層微細血管の表示が抑制されていることで、相対的にピットパターンなどの表層微細構造の視認性が向上している。
(もっと読む)
立体内視鏡装置

【課題】被写体に対する適正な立体感のある画像を簡易に取得する。
【解決手段】被検体内に挿入される挿入部2の先端に、相互に間隔をあけて配置された2つの撮像素子7と、該撮像素子7の光軸の相対角度を変化させる角度変更機構5,6と、撮像素子7から被写体までの距離を検出する距離センサ9と、該距離センサ9により検出された距離に基づいて角度変更機構5,6を制御する制御部とを備える立体内視鏡装置1を提供する。
(もっと読む)
内視鏡及び内視鏡システム
【課題】 内視鏡及び内視鏡システムを提供する。
【解決手段】 特徴点に対応したパターンを有するパターン光を提供するパターン光提供部と、パターン光が照射された撮影対象を撮影する第1撮影部及び第2撮影部と、パターン光を撮影対象に伝達し、撮影対象から反射された光を第1撮影部及び第2撮影部に伝達する光伝達部と、を備える内視鏡である。
(もっと読む)
内視鏡装置およびプログラム
【課題】計測値の精度をユーザに知らせることができる内視鏡装置およびプログラムを提供する。
【解決手段】3次元座標計算部12aは、画像上で指定された計測位置および画像における所定位置のそれぞれに対応する3次元座標を計算する。計測部12bは、計測位置に対応する3次元座標に基づいて被写体のサイズを計測する。不確かさ推定部12cは、画像における所定位置のそれぞれに対応する3次元座標のばらつきの推定値を計算し、3次元座標のばらつきの推定値に基づいて、画像における所定位置のそれぞれについて、被写体のサイズを計測した場合の計測値のばらつきの推定値を計算する。画像合成部12dは、計測値のばらつきの推定値に基づいて、計測値のばらつきを示す情報を画像データに合成する。
(もっと読む)
内視鏡装置および画像取得方法
【課題】取得された複数の画像間の位置ずれを抑えることができる内視鏡装置を提供すること。
【解決手段】第一光源からの照明光の出射が開始されてから照明光の光量が安定するまでの時間waと、第二光源からの投影光の出射が開始されてから投影光の光量が安定するまでの時間wbとに基づいて、照明部と縞投影部とのうち光量が安定するまでの時間が長い方を先に動作させて被検物の第一の画像を撮像部に取得させ、照明部と縞投影部とのうち光量が安定するまでの時間が短い方を第一の画像の取得後に動作させて被検物の第二の画像を撮像部に取得させることを特徴とする。
(もっと読む)
内視鏡装置
【課題】縞パターンを被検物に投影して被検物の計測を行うことができ、且つ挿入部がより細径化された内視鏡装置を提供すること。
【解決手段】被検物に縞パターンが投影されたパターン投影画像を用いて被検物の計測を行う内視鏡装置1であって、長尺の挿入部10と、挿入部の先端部に設けられ、被検物の画像を取得する撮像部30と、撮像部の観察視野を照明する照明部40と、被検物に縞パターンを投影するための投影光を発する光源が設けられたパターン投影部50と、を備え、パターン投影部は、被検物に対して縞パターンが投影されている状態において、撮像部の撮像視野内で縞パターンの縞が並ぶ方向の少なくとも一端に縞パターンが投影されていない未投影領域Xを生じさせる。
(もっと読む)
内視鏡装置および計測方法
【課題】挿入部が細径化された内視鏡装置を提供すること。
【解決手段】被検物に縞パターンが投影されたパターン投影画像を用いて被検物の計測を行う内視鏡装置1であって、長尺の挿入部10と、挿入部10の先端部に設けられ、被検物の画像を取得する撮像部30と、挿入部10の先端部に設けられ、撮像部30の観察視野を照明する照明光を発する照明部40と、挿入部10の先端部に設けられ、被検物に縞パターンを投影するパターン投影部50と、を備え、挿入部10の先端面10aには、撮像部30に被検物の像を結像させる対物光学系32と、照明光を出射する1つ以上の照明窓12と、パターン投影部50から被検物へ縞パターンを投影する1つの投影窓13と、が設けられている。
(もっと読む)
オーバーチューブ,内視鏡スコープおよび立体断層診断装置
【課題】三次元画像取得用プローブを検査部位に密着させる。
【解決手段】内視鏡の先端部14が挿通する内視鏡スコープ用挿通路21が形成されている。先端から少し基端側に離れた場所においてオーバーチューブ20の周面(下面)には側口29が開けられている。第1のワイヤ挿通路22内に挿通されている第1のワイヤ23が引っ張られると,オーバーチューブ20の先端部が上方向に曲がる。すると,内視鏡の先端部14に格納されている三次元画像取得用プローブ19の延長線上に側口29が位置する。三次元画像取得用プローブ19が側口29からオーバーチューブ20の外部に出されると,オーバーチューブ20の先端部分において三次元画像取得用プローブ19が検査部位に密着させられる。
(もっと読む)
三次元(3D)ハイビジョン映像による手術支援装置
【課題】内視鏡用三次元カメラは体内に挿入するため、体内に挿入するため、直径が5mmから11mmしかなく大きさの制限があり、この条件内で内視鏡カメラを改造することなく三次元映像の出力・表示・録画を可能とする手段を提供する。
【解決手段】三次元カメラからの入力画像を、複数の二次元表示装置及び、三次元表示装置、録画装置に分配伝送する集中管理装置と、パターンマッチング、構造識別、特徴抽出を実行する画像処理プロセッサー1、画像同期、画像合成、を行う画像処理プロセッサー2、を設け、三次元内視鏡カメラから入力された画像に処理を加え、対象物と同じ三次元画像に補正し、三次元用表示装置に表示するようにした。
(もっと読む)
回転機械のオンライン監視のためのシステム及び方法
【課題】回転機械のオンライン監視のためのシステム及び方法を提供する。
【解決手段】システムは、タービンシステムなどの回転機械の内部と光学的に連通するよう構成された光学監視システムを含む。光学監視システムは、検出器アレイから回転機械の構成要素であるタービンブレード56に延びる光学的接続部38を含み、回転機械が作動中である間、回転機械の内部の構成要素56の異なる領域108等に向けて視野98、102を再配向し、各領域108等の画像を取り込むよう構成される。
(もっと読む)
内視鏡装置
【課題】使用環境の変化に応じて画像処理の内容を変更でき、計測精度の劣化を低減できる内視鏡装置を提供する。
【解決手段】視差を有する対の対物光学系7a,7bを用いて撮像素子8により撮像された信号は、映像信号処理部14を経て画像処理部16の第1画像処理部16及び第2画像処理部17に入力される。検知温度に応じて記憶部20に予め使用環境に応じてテーブル化された基準データを参照する画像処理部選択部19からの指示に応じて、第1画像処理部16は、複数の処理内容における1つの処理内容で画像処理して、対の計測用画像を計測部18に出力し、計測部18は対の計測用画像を用いて被検体の距離や面積等を計測して、計測結果を画像表示装置4に出力する。
(もっと読む)
多視点裸眼立体内視鏡システム
【課題】本発明は、立体内視鏡システムに特有のストレスから手術スタッフを解放するとともに、質の高い施術を支援することができる新規な立体内視鏡システムを提供することを目的とする。
【解決手段】立体内視鏡用ステレオカメラによって取得されたステレオ画像に基づいて撮像対象の奥行値とRGB値を関連付けた3Dデータを生成し、当該3Dデータに基づいて描画した複数の仮想的な視点に対応する複数のステレオ画像が集約してなる多視点ステレオ画像を多視点裸眼立体ディスプレイ装置に表示させることによって、患部の実写映像の多視点裸眼立体視を実現する。
(もっと読む)
内視鏡画像処理装置および方法、並びに、プログラム
【課題】解剖学的構造物に挿入された内視鏡により撮影された内視鏡画像からボリュームデータを生成する。
【解決手段】 複数の内視鏡画像および複数の仮想内視鏡画像を取得し、取得された複数の内視鏡画像のうち解剖学的構造物の所定の位置から撮影された内視鏡画像と、取得された複数の仮想内視鏡画像のうち所定の位置と対応する位置から撮影されたように仮想的に生成された比較仮想内視鏡画像を抽出して対応付けし、比較仮想内視鏡画像を構成する複数の画素のそれぞれの3次元的な位置に基づいて、所定の位置から撮影された内視鏡画像を構成する複数の画素のそれぞれ対応する3次元的な位置を算出し、所定の位置から撮影された内視鏡画像を構成する複数の画素の個々の画素値とそれぞれの画素について算出された3次元的な位置に基づいて、所定の位置から撮影された内視鏡画像からボリュームデータを生成する。
(もっと読む)
テレセントリック焦点ぼかしを使用した3Dイメージング
【課題】歯又はその他の口腔内構造の表面から3Dイメージデータを得る装置を提供する。
【解決手段】歯の3D表面輪郭イメージデータを得るための装置が、歯の表面のイメージを検出器アレイ24上に形成するように配置された二重テレセントリック光学システムを有する。焦点調整機構は、二重テレセントリック光学システム及び検出器アレイの一方又は両方の位置を、光軸に沿って、焦点位置列の各々まで調整するように駆動可能である。制御ロジックプロセッサ44は、焦点調整機構と制御信号通信状態にあって、焦点位置を調整し、検出器アレイとイメージデータ通信状態にあって、検出器アレイによって得られたイメージデータを受領し、焦点位置列の各々に対応する受領されたイメージデータを記憶するメモリ48を有する。制御ロジックプロセッサはさらに、記憶された命令に応答して、イメージデータから3D表面輪郭イメージデータを計算する。
(もっと読む)
撮像装置、撮像方法、撮像プログラム、及び内視鏡
【課題】簡易な構成及び処理で奥行方向の距離感を直感的に把握することができる撮像装置、撮像方法、撮像プログラム、及び内視鏡を提供する。
【解決手段】特徴点抽出部26で、カメラ41A及び41Bにより撮像された画像から特徴点Pを抽出し、距離計測部27で、特徴点Pに対応する実際の特徴点位置P’とカメラ位置Pcとの奥行方向の距離Dを計測する。ワイヤフレーム構築部28で、特徴点位置P’及び距離Dに基づいて、奥行方向に等間隔に配置された特徴点位置P’を囲む複数の円弧と、等間隔に配置された奥行方向に伸びる直線とで構成したワイヤフレームを構築し、レーザ制御部29で、構築されたワイヤフレームが対象範囲に描画されるようにレーザ照射装置42を制御する
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び立体内視鏡装置
【課題】画像を参照する参照者の疲労感や緊張感を緩和させる。
【解決手段】内視鏡による広角側撮影画像(2D画像)、立体視用画像(3D画像)およびナビゲーション用の画像(全体画像)を取得し、2D画像の一部に3D画像を表示させ(ステップ100〜108)、3D画像への術者の視線滞留時間が所定時間T0以上で、3D画像表示領域を徐々に広げ(ステップ110〜114)、術者の2D画像と3D画像間の視線移動が所定頻度h1以上で3D画像表示領域を徐々に狭くする(ステップ116〜134)。
(もっと読む)
内視鏡装置およびプログラム
【課題】操作の煩わしさを低減し操作性を向上することができる内視鏡装置およびプログラムを提供する。
【解決手段】基準点指定部18bは、入力装置を介して入力される指示に基づいて、画像における第1の基準点および第2の基準点を設定する。基準線算出部18cは、第1の基準点および第2の基準点に基づいて、画像における基準線を設定する。点算出部18dは、基準線に基づいて、画像において少なくとも3点を設定する。基準面算出部18fは、少なくとも3点に基づいて、空間上の基準面を設定する。距離算出部18gは、第1の基準点に対応する空間上の点と基準面との距離を算出する。
(もっと読む)
立体的可視化システム
内視鏡装置およびプログラム
【課題】ユーザに対応点の確認を促すことができる内視鏡装置およびプログラムを提供する。
【解決手段】カーソル位置算出部18aは、入力装置を介して入力される指示に基づいて、画像データに基づく被写体の第1の画像において第1の位置を指定する。対応点算出部18bは、画像データに基づく被写体の第2の画像において、第1の画像における第1の位置に対応する第2の位置を算出する。表示処理部18cは、第1の位置が指定されたときに、第1の画像において第1の位置を含む第1の領域と、第2の画像において第2の位置を含む第2の領域とを除く領域の表示形態を制御する。
(もっと読む)
挿管支援装置
【課題】立体的な観察が可能な挿管支援装置を提供する。
【解決手段】立体視アダプター10を介してディスプレイ3を観察する。立体視アダプター10には観察者の視線を左右に広げる左右一対のプリズム13が設けられているため、左右一対の電子画像A、B間の距離が小さくても、両方の電子画像A、Bをプリズム13を介して確実に視認でき、立体観察が可能となる。
(もっと読む)
1 - 20 / 72
[ Back to top ]