
Fターム[2H040BA22]の内容
Fターム[2H040BA22]に分類される特許
1 - 20 / 86
内視鏡装置
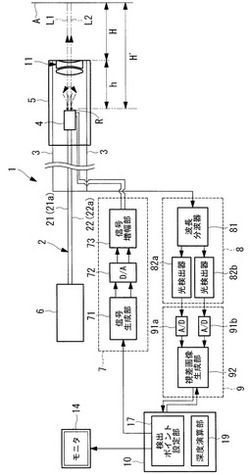
【課題】被検体を観察し又は画像を取得する場合において、挿入部先端の観察対象からの距離である深度に係る情報を取得する。
【解決手段】2つの画像を取得し、一の画像における任意の点を基点とし、一の画像における一の光ファイバ21,22の走査軌跡の中心と他の画像における他の光ファイバの走査軌跡の中心とを結ぶ直線上に基点を投影させた投影点を第1の検出ポイントとし、他の画像における第1の検出ポイントと対応する点を第2の検出ポイントとして設定する検出ポイント設定部17と、一の画像の第1の検出ポイントにおける一の光ファイバの螺旋状走査軌跡の周回数と、他の画像の第2の検出ポイントにおける前記他の光ファイバの螺旋状走査軌跡の周回数とに基づいて、挿入部5の前記観察対象に対する深度Hを演算する内視鏡装置1を提供する。
(もっと読む)
立体内視鏡装置

【課題】被写体に対する適正な立体感のある画像を簡易に取得する。
【解決手段】被検体内に挿入される挿入部2の先端に、相互に間隔をあけて配置された2つの撮像素子7と、該撮像素子7の光軸の相対角度を変化させる角度変更機構5,6と、撮像素子7から被写体までの距離を検出する距離センサ9と、該距離センサ9により検出された距離に基づいて角度変更機構5,6を制御する制御部とを備える立体内視鏡装置1を提供する。
(もっと読む)
内視鏡装置およびプログラム
【課題】計測値の精度をユーザに知らせることができる内視鏡装置およびプログラムを提供する。
【解決手段】3次元座標計算部12aは、画像上で指定された計測位置および画像における所定位置のそれぞれに対応する3次元座標を計算する。計測部12bは、計測位置に対応する3次元座標に基づいて被写体のサイズを計測する。不確かさ推定部12cは、画像における所定位置のそれぞれに対応する3次元座標のばらつきの推定値を計算し、3次元座標のばらつきの推定値に基づいて、画像における所定位置のそれぞれについて、被写体のサイズを計測した場合の計測値のばらつきの推定値を計算する。画像合成部12dは、計測値のばらつきの推定値に基づいて、計測値のばらつきを示す情報を画像データに合成する。
(もっと読む)
内視鏡装置および計測方法
【課題】計測に適した条件であるかを短時間で判定できる内視鏡装置および計測方法を提供する。
【解決手段】本発明の内視鏡装置1は、第一光源41からの照明光の出射状態を所定の周期で変化させ、第一光源41から照明光が出射されている状態では第二光源51からの投影光の出射を停止させ、第一光源41からの照明光の出射が停止されている状態では第二光源51から投影光を出射させ、照明光により被検物が照明された明視野画像を第一光源41から照明光が出射されている状態で撮像部30に取得させ、被検物に縞パターンが投影されたパターン投影画像を投影光が出射されている状態で撮像部30に取得させ、撮像部30が取得したパターン投影画像を用いて被検物の三次元形状を計測し、パターン画像を用いた計測によって得られた情報を明視野画像とともにモニター28に表示させるメイン制御部22を備える。
(もっと読む)
内視鏡システム
【課題】内視鏡の観察視野内において、遠隔操作にて段差に対して不特定の方向から治具を接触させることができ、容易かつ簡単に段差深さを測定することができる構成を具備する内視鏡システムを提供する。
【解決手段】軸部材2と、回動部材3とを有する治具1と、少なくとも治具1を観察する内視鏡50と、を具備し、軸部材2は、凹部に回動部材3が嵌入後、凹部の深さが回動部材3の肉厚以上のときパイプ部材10の頂面に接触するとともに凹部の深さが回動部材3の肉厚よりも小さいときパイプ部材10の頂面に非接触となり、内視鏡50は、凹部に回動部材3が嵌入後、少なくともパイプ部材10の頂面への軸部材2の接触の有無を観察することを特徴とする。
(もっと読む)
内視鏡装置
【課題】内視鏡プローブの挿入操作に要する時間を短縮させることが可能な内視鏡装置を提供する。
【解決手段】本発明の内視鏡装置は、被観察物内の被写体を撮像して撮像信号を出力する撮像部が先端部に設けられた内視鏡プローブと、先端部の変位量を検出する変位量検出部と、撮像部から出力される撮像信号に基づいて画像データを生成する信号処理部と、信号処理部により生成された画像データに基づいて記録用の画像データを生成する記録用画像生成部と、変位量検出部の検出結果に基づいて算出される先端部の位置情報を含むトレースデータを取得するトレースデータ取得部と、トレースデータと、記録用の画像データと、を関連付けて記録させるための処理を行う記録制御部と、を有する。
(もっと読む)
光計測システムおよび光計測方法
【課題】吸光成分濃度の推定の確からしさを高める。
【解決手段】光計測システムの一例として示す電子内視鏡システム15では、被観察部位に励起光を照射して血管に注入されたインドシアニングリーンを励起発光させ、これを撮像して得た撮像信号に基づき、被観察部位表面からの血管の深さを推定する。また、被観察部位に波長帯域の異なる少なくとも二種の狭帯域光を照射して得た撮像信号に基づき、血管中のヘモグロビンの酸素飽和度を推定する。酸素飽和度を推定する際には、血管深さ推定の結果に適合した観察条件となるよう酸素飽和度の推定アルゴリズムを変更する。
(もっと読む)
ガイドチューブ装置および内視鏡システム
【課題】内視鏡の観察視野を固定した状態で測定対象物上の測定位置を移動させることができるガイドチューブ装置を提供する。
【解決手段】ガイドチューブ装置5は、可視光線を観察する内視鏡3の挿入部2を挿通するためのチャンネル4が設けられ、基端側を挿入部に取付けたときに挿入部に設けられた湾曲部14より先端側に位置するチューブ先端部42を有するチューブ本体40と、被照射領域W1に可視光線を照射し被照射領域に隣接する部分に対して被照射領域が反射する可視光線の明るさを内視鏡により視認可能に異ならせる発光部51、および、所定の受信方向Dからの可視光線を検出する受信部53を有し、被照射領域までの距離を測定する測定部と、被照射領域から受信部に向かう方向が受信方向となるように、発光部および受信部のチューブ先端部に対する向きを調節する向き調節部48と、を備え、発光部および受信部は、チューブ先端部に接続されている。
(もっと読む)
ガイドチューブ装置および内視鏡システム
【課題】内視鏡の湾曲部が湾曲するのに伴って距離測定部の向きが変わるガイドチューブ装置を提供する。
【解決手段】可撓性を有する材料で形成されるとともに内視鏡3の挿入部2が挿通可能なチャンネルが設けられ、基端側を挿入部に取付けたときに、挿入部に設けられた湾曲部14より先端側に位置する先端領域R内に自身の先端部が配置されるように設定されたチューブ本体と、先端領域内のチューブ本体に配置され、測定対象物Wに電磁波を照射する発信部41および測定対象物で反射された電磁波を検出する受信部43を有し、測定対象物までの距離を測定する距離測定部39と、を備える。
(もっと読む)
撮像装置、撮像方法、撮像プログラム、及び内視鏡
【課題】簡易な構成及び処理で奥行方向の距離感を直感的に把握することができる撮像装置、撮像方法、撮像プログラム、及び内視鏡を提供する。
【解決手段】特徴点抽出部26で、カメラ41A及び41Bにより撮像された画像から特徴点Pを抽出し、距離計測部27で、特徴点Pに対応する実際の特徴点位置P’とカメラ位置Pcとの奥行方向の距離Dを計測する。ワイヤフレーム構築部28で、特徴点位置P’及び距離Dに基づいて、奥行方向に等間隔に配置された特徴点位置P’を囲む複数の円弧と、等間隔に配置された奥行方向に伸びる直線とで構成したワイヤフレームを構築し、レーザ制御部29で、構築されたワイヤフレームが対象範囲に描画されるようにレーザ照射装置42を制御する
(もっと読む)
制御装置、内視鏡システム、プログラム及び制御方法
【課題】病変の検出精度を向上する制御装置、内視鏡システム、プログラム及び制御方法等を提供すること。
【解決手段】制御装置18は、第1体内データ取得部185と第2体内データ取得部186と出力制御部181を含む。特殊光画像が第1の内視鏡装置10により取得され、注目領域を含む画像が特殊光画像の中から検出され、注目領域を含む画像が撮像された際の第1の内視鏡装置10の位置を示す注目位置情報が取得される。この場合に、第1体内データ取得部185は、注目位置情報を含む第1の体内データを取得する。第2体内データ取得部186は、第2の内視鏡装置15の位置を示す第2の位置情報を含む第2の体内データを取得する。出力制御部181は、第1の体内データと第2の体内データに基づいて、第2の内視鏡装置15を誘導するための誘導情報を出力する。
(もっと読む)
内視鏡装置およびプログラム
【課題】操作の煩わしさを低減し操作性を向上することができる内視鏡装置およびプログラムを提供する。
【解決手段】基準点指定部18bは、入力装置を介して入力される指示に基づいて、画像における第1の基準点および第2の基準点を設定する。基準線算出部18cは、第1の基準点および第2の基準点に基づいて、画像における基準線を設定する。点算出部18dは、基準線に基づいて、画像において少なくとも3点を設定する。基準面算出部18fは、少なくとも3点に基づいて、空間上の基準面を設定する。距離算出部18gは、第1の基準点に対応する空間上の点と基準面との距離を算出する。
(もっと読む)
内視鏡用光照射装置
【課題】体腔内に挿入され、照射光を導光して被観察部に照射する内視鏡挿入部を備えた内視鏡用光照射装置において、装置の大型化を招くことなく、小型かつ簡易な構成で照射光の拡がり角を変更する。
【解決手段】テーパー化された第1のマルチモード光ファイバ61による被観察部への照射光の照射と第1のマルチモード光ファイバ61よりもテーパー率の低い第2のマルチモード光ファイバ71による被観察部への照射光の照射とを切り替え可能に構成する。
(もっと読む)
内視鏡装置およびプログラム
【課題】ユーザに対応点の確認を促すことができる内視鏡装置およびプログラムを提供する。
【解決手段】カーソル位置算出部18aは、入力装置を介して入力される指示に基づいて、画像データに基づく被写体の第1の画像において第1の位置を指定する。対応点算出部18bは、画像データに基づく被写体の第2の画像において、第1の画像における第1の位置に対応する第2の位置を算出する。表示処理部18cは、第1の位置が指定されたときに、第1の画像において第1の位置を含む第1の領域と、第2の画像において第2の位置を含む第2の領域とを除く領域の表示形態を制御する。
(もっと読む)
内視鏡装置
【課題】励起光を被観察部に照射する内視鏡挿入部を備えた内視鏡装置において、内視鏡挿入部の先端と被観察部との間の距離情報をより簡易な構成で精度良く取得する。
【解決手段】被観察部の近傍に設置された蛍光標識Mを撮像し、その撮像した蛍光標識Mの信号強度に基づいて、内視鏡挿入部先端と被観察部との距離情報を取得する。
(もっと読む)
三次元形状検出装置、及び、挿入部材の三次元形状を検出する方法
【課題】検査対象物内に挿入された挿入部材の三次元形状を検出する際の、検出精度と応答性とを両立させた三次元形状検出装置、及び、挿入部材の三次元形状を検出する方法を提供すること。
【解決手段】検査対象物内に挿入された内視鏡7の三次元形状を検出する三次元形状検出装置を次のように構成する。内視鏡7に設けられ三次元形状を検出する為の検出信号を取得する複数のセンサを備える検出部5と、検出部5が備える複数のセンサにより取得した検出信号に基づいて、内視鏡7の三次元形状を算出し、且つ、後述する間引き処理を行う処理部3と、検出部5による検出信号の取得の際または処理部3による三次元形状の算出の際に時間的なデータ間引き処理を行う対象の内視鏡7の部位を判定する間引き判定手段3aと、を三次元形状検出装置に具備させる。
(もっと読む)
内視鏡
本発明は、投影ユニット(6)と撮像ユニット(8)とを備え、表面(4)のトポグラフィを測定するための内視鏡に関し、投影ユニットと撮像ユニットとは内視鏡軸(10)に関して相前後して配置されている。 (もっと読む)
形状検出装置
【課題】スコープ形状を精度良く検出するのに好適な形状検出装置を提供すること。
【解決手段】形状検出装置を、スコープ挿入部の基端から先端に亘って複数配置され、配置箇所におけるスコープ挿入部の屈曲角度を検出する屈曲角度検出センサと、隣接する屈曲角度検出センサ間の距離の変化量を検出する距離変化検出センサと、検出された変化量を距離の初期値に加算して、隣接する屈曲角度検出センサ間の実距離を計算する実距離計算手段と、計算された各屈曲角度検出センサ間の実距離と、検出された各配置箇所における屈曲角度とを用いて、スコープ挿入部の基端から先端に至る挿入形状を計算する形状計算手段と、から構成した。
(もっと読む)
内視鏡形状検出装置
【課題】ソフトウエアあるいはデータをアップデートすることなく、簡単に最適なコイルデータにより形状検出及び推定を行う。
【解決手段】ゲイン設定データ(演算/設定数値データ)は、内視鏡システムの起動時に、ビデオプロセッサを介して内視鏡形状検出装置に取り込まれる。内視鏡形状検出装置では、制御信号発生回路部40を介してゲイン設定データ(演算/設定数値データ)を、例えば2ポートメモリ42の第2のRAM42cの所定のアドレス領域に格納する。
(もっと読む)
内視鏡装置
【課題】プローブを使用可能な内視鏡装置において、2つの画像間でずれのない合成画像を得る。
【解決手段】走査型内視鏡のプローブ15がビデオスコープ10の鉗子チャンネル10Fに挿入可能な内視鏡装置において、診断モードが設定されると、白色光と励起光を交互に照射し、フルカラー画像である通常観察画像と、蛍光観察画像を生成し、プローブ先端部15Tの突出長さを検出する。検出された突出長さに基づき、蛍光観察画像の拡大/縮小倍率および位相シフト量を決定し、合成切替回路36において、病変部などの観察対象サイズが通常観察画像の観察対象サイズと一致するように、決定された倍率に従って蛍光観察画像の拡大/縮小処理を行い、決定された位相シフト量に従って位相シフト処理を実行する。
(もっと読む)
1 - 20 / 86
[ Back to top ]