
Fターム[3B057DA00]の内容
電気掃除機 (3,536) | 運転制御 (1,268)
Fターム[3B057DA00]の下位に属するFターム
Fターム[3B057DA00]に分類される特許
1 - 20 / 380
自走式掃除機
【課題】 絨毯などの塵埃を容易に移動することができない床面を有する部屋の壁際全体を、効率よく掃除することが可能な自走式掃除機を提供する。
【解決手段】 駆動輪を備え、この駆動輪により被清掃面上を移動する本体と、本体の前端下部に設けられた塵埃吸込口と、本体に設けられた壁面に対する本体の位置を検知する為の検知手段とを備えた自走式掃除機において、掃除動作中に、本体の前端が壁面に近接した場合、本体の前端が壁面に近接した状態で、本体を同じ位置に所定時間の間留めるように自走式掃除機を構成する。
(もっと読む)
ロボット掃除機及びその制御方法

【課題】ロボット掃除機及びその制御方法を提供する。
【解決手段】ロボット掃除機の制御方法は、第1の掃除モードに従って、前記ロボット掃除機の位置を基準にして多数の掃除領域を定義すること;及び定義された前記掃除領域別に順次掃除を行うこと;を含む。本発明のロボット掃除機及びその制御方法によると、繰り返しモードが開始され、ロボット掃除機の位置を基準にして多数の掃除領域を定義し、掃除領域別に順次掃除を行うとき、基準壁面の検出可否によってロボット掃除機が属した掃除領域を再設定し、再設定された掃除領域内で走行経路に沿って移動しながら掃除を行うので、掃除が1回も行われていない領域や掃除の重複領域を減少させることができる。また、掃除が1回も行われていない領域や掃除の重複領域を減少させることによって、ロボット掃除機の掃除効率を向上させることができる。
(もっと読む)
電気掃除機
【課題】十分に塵埃が清浄化され、消臭する脱臭性能の良い電気掃除機を提供する。
【解決手段】電動送風機2を内蔵した掃除機本体(図示せず)に着脱自在に取り付けられると共に、フィルター(図示せず)で捕集された塵埃を蓄積する集塵部(図示せず)と制御収納ユニット(図示せず)が着脱自在に取り付けられた集塵容器(図示せず)と、制御収納ユニット内に配されたイオンまたはオゾンを放出する高圧発生装置43または、帯電微粒子水を生成して放出する静電霧化装置44の動作を制御する制御手段62と、掃除機本体内または制御収納ユニット内に配され高圧発生装置43または静電霧化装置44に電力を供給する電源装置66を備え、集塵部およびフィルターに、イオンまたはオゾンまたは、帯電微粒子水を放出するもので、イオンまたはオゾンまたは、帯電微粒子水が長い時間集塵容器内に留まり、塵埃の清浄・脱臭性能の良い電気掃除機を提供することができる。
(もっと読む)
ロボット清掃機及びその制御方法
【課題】障害物が感知されると、補助掃除ユニットの突出または収納の度合を調節するロボット掃除機及びその制御方法を提供すること。
【解決手段】床を走行する本体と、該本体に近接する障害物を感知する障害物感知部と、前記本体の下部に突出及び収納可能に装着される補助掃除ユニットと、前記障害物が感知されると前記補助掃除ユニットの突出または収納の度合を調節して前記補助掃除ユニットが突出または収納されるように制御する制御部と、を備える。
(もっと読む)
掃除ロボット
【課題】ユーザーが所望する任意の位置まで容易に誘導することができ、効率がより高い掃除運転を遂行することが可能な掃除ロボットを提供する。
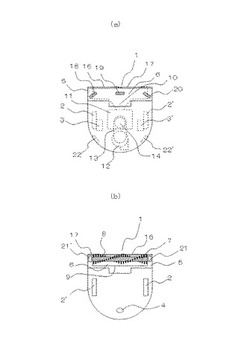
【解決手段】掃除ロボット1は吸込口6と排気口7とを開口して床面上を自走する本体筐体2と、本体筐体2内に配置した電動送風機22と、電動送風機22の駆動によって吸込口6から吸い込まれた気流の塵埃を集塵する集塵部30と、赤外線を発することにより本体筐体2の設置空間の任意の位置を指定する赤外線リモコン60と、赤外線リモコン60によって指定された指示位置を検知する赤外線センサー18と、を備え、赤外線センサー18が検知した指示位置まで移動して及び/または指示位置までの移動中に掃除運転を実行する。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】補助掃除ユニットの誤作動を検出し、該検出結果に基づいてロボット掃除機の走行を制御し、補助掃除ユニットに誤作動が発生した場合にも隅部分を効率的に掃除できるロボット掃除機及びその制御方法を提供する。
【解決手段】このロボット掃除機は、前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニット100と、前記補助掃除ユニットの突出、収納または回転状態を感知する感知部300と、前記感知部の感知結果に基づいて前記補助掃除ユニットが正常に動作するか否かを判断し、前記判断結果に基づいて前記ロボット掃除機の走行を制御する制御部200と、を備える。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】ロボット掃除機の走行パターンまたは掃除パターンと補助掃除ツールの突出・収納動作及び回転動作とを連携付けて制御することによって、より効率的な掃除動作を行うことができるロボット掃除機及びその制御方法を提供する。
【解決手段】このロボット掃除機は、該ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニットと、前記ロボット掃除機の掃除領域に位置している障害物を感知する感知部と、掃除領域の最外側部に沿って壁面追従方式で走行しながら前記補助掃除ユニットが前記ロボット掃除機の外部に突出されるように制御し、前記掃除領域の最外側部の走行が完了すると、前記掃除領域の内側部を走行しながら前記補助掃除ユニットが収納されるように制御する制御部と、備える。
(もっと読む)
ロボット掃除機
【課題】床の隅までサイドブラシが触れるような構造を有するロボット掃除機を提供すること。
【解決手段】ロボット掃除機は、床を走行しながら床からホコリを除去するように構成され、ロボット掃除機の側面外観を形成する側面縁を有する本体と、床の隅を掃除するように本体に設けられた少なくとも一つのサイドブラシアセンブリーと、を備え、サイドブラシアセンブリーは、本体に回動可能に結合され、本体の内部に挿入された第1の位置と本体の側面縁の外側に突出した第2の位置との間で移動するサイドアームと、床を掃くようにサイドアームに設けられたブラシユニットと、サイドアームが本体の内部に挿入された時に本体の側面縁の一部を形成するようにサイドアームに結合された縁カバーと、を有してなる。
(もっと読む)
掃除ロボット
【課題】集塵能力を向上するとともに走行異常を防止できる掃除ロボットを提供する。
【解決手段】床面Fに対峙する吸込口6を底面に開口する本体筐体2と、水平な回転軸29aを有して本体筐体2を自走させる一対の駆動輪29と、駆動輪29に対して掃除時の進行方向の前方に配される前輪27と、駆動輪29に対して掃除時の進行方向の後方に配される後輪26とを備え、前輪27と駆動輪29との間に吸込口6が配されるとともに、平坦な床面Fを自走する際に前輪27が床面から離れて駆動輪29及び後輪26が接地する。
(もっと読む)
掃除ロボット
【課題】効果的な吸引によって清掃性能が高められ、さらに室内の脱臭効果や除菌効果の向上を図ることが可能な掃除ロボットを提供する。
【解決手段】掃除ロボット1は吸込口6と排気口7とを開口して床面上を自走する本体筐体2と、本体筐体2内に配置した電動送風機22と、電動送風機22の駆動によって吸込口6から吸い込まれた気流の塵埃を集塵する集塵部30と、電動送風機22と排気口7との間において複数の経路である第1排気路24a及び第2排気路24bで形成された排気流路と、排気流路のうち第1排気路24aにイオンを放出するイオン発生装置25と、を備える。
(もっと読む)
電気掃除機
【課題】指定床の内部に入り込んだ塵埃を叩き出して掃除ができるとともに、この叩き出しに伴う指定床のダメージを抑制可能な電気掃除機を提供する。
【解決手段】電気掃除機は、電動送風機18、吸込み口体に搭載された叩き手段46、床判定手段54、塵埃検出手段55、塵埃量判定手段58、叩き制御手段59を備える。床判定手段54は吸込み口体が接した被掃除床が指定床か否かを判定する。塵埃検出手段55は、吸込み口体と電動送風機の吸引口を連通した風路を通過する塵埃を検出する。塵埃量判定手段57は、指定床から風路を通過する塵埃の有無を判定するとともに、指定床から叩き出されて検出手段55で検出された塵埃の量が設定された閾値を超えるか否かを判定する。叩き制御手段59は、指定床からの塵埃が検出された場合に叩き手段46を駆動して指定床を試しに叩いた上で、塵埃の量が閾値を超えた場合に手段46の駆動を継続させ、塵埃の量が閾値以下である場合に手段46の駆動を停止させることを特徴としている。
(もっと読む)
自律表面処理電気器具
【課題】一般的に、自律床処理電気器具、特に、限定ではないが自律真空掃除機を提供する。
【解決手段】外側平面プロフィールを形成する主本体を含み、主本体の外側平面プロフィールの機内に装着され、清掃される表面にわたって移動の方向に電気器具を推進するように構成された駆動配置と、主本体に付随し、移動の方向に対して横方向に担持された表面処理アセンブリとを有し、表面処理アセンブリが、ほぼ細長の形態であり、かつ主本体の外側平面プロフィールのそれぞれの円形部分に対して実質的に接線方向に延びる側縁を有する自律表面処理電気器具。
(もっと読む)
環境地図を用いた掃除ロボット
【課題】簡単に操作でき、自動的に環境内を掃除する掃除ロボットを提供する。
【解決手段】本発明は、コンピュータ18により駆動制御する走行制御部34と、車輪センサ36と、環境との接触を検出する接触センサ38を有し、環境を掃除する掃除ロボットにおいて、環境地図を保存する環境地図記憶部25と、オドメトリ情報から得られるロボット座標を保存するロボット座標記憶部21と、多数のパーティクルの座標を保存するパーティクル座標記憶部22と、前記環境地図とパーティクル軌道を保存するパーティクル掃引地図記憶部23と、前記多数のパーティクルの尤度を演算して最適軌道を導出する最適軌道導出手段と、前記最適軌道を前記掃除ロボットの軌道として保存するロボット掃引地図記憶部23と、小尤度のパーティクルを消去するリサンプリング手段と、前記掃除ロボット及び前記パーティクルを回転反射させる反射手段を有する掃除ロボットである。
(もっと読む)
掃除システムおよびその制御方法
【課題】全体の構成を小型化することができる掃除システムを得る。
【解決手段】掃除機本体11と、掃除対象領域を示す地図情報が入力される地図情報入力装置13と、掃除機本体11の位置情報を取得する位置情報取得装置14と、地図情報入力装置13に入力される地図情報および位置情報取得装置14が取得する掃除機本体11の位置情報に基づいて、掃除対象領域の中で掃除機本体11が通過した領域を示す領域情報を作成する領域情報作成装置15と、領域情報作成装置15が作成した領域情報を表示する表示装置22とを備えている。
(もっと読む)
室内用集塵装置およびこの装置を機能させるためのプログラム
【課題】空気清浄機において、吸引している気流に乗って空気清浄機へ引き寄せられた塵埃の一部が近傍で落下し、空気清浄機の周囲に塵埃が溜まりやすくなるという課題があった。また掃除ロボットでは、掃除中の清掃動作により掃除ロボット本体の移動に伴う移動気流や、清掃時の吸引に伴う排気気流などの影響により、掃除ロボット本体の周囲の床面に堆積している塵埃を巻き上げるという課題があった。
【解決手段】状態検出手段108で床面清掃部220が清掃を行っていると判断したときに、空気清浄部100の送風手段104を動作させることで、床面清掃部220で清掃中に舞い上がる塵埃を回収するとともに、床面清掃部220は、誘導信号を受信して空気清浄部100へ移動する際に、空気清浄部100の周囲の清掃を重点的に行うことで、空気清浄部100の周囲に堆積している塵埃を除去する。
(もっと読む)
電気掃除機用吸込具およびそれを用いた電気掃除機
【課題】サッシの溝など、隙間用ノズル等の吸込具の先が入らず、吸塵できないような箇所でも吸塵できる電気掃除機用吸込具を提供することを目的とする。
【解決手段】吸込具1の吸込口2の周囲に隣接して吹出し風3を吹出す射出ノズル4を複数本配置し、前記射出ノズル4は、前記吸込口2の前方中央付近に焦点を合わせて射出するように互いに傾斜させて形成しており、かつ、前記射出ノズル4は、前記吸込口2の周囲を均等に分割した位置に配置構成したことにより、サッシの溝など、隙間用ノズル等の吸込具の先端が入らず、吸塵することができないような複雑な箇所において、被掃除面に吹出し風3を吹き当てても、従来のように被掃除面上をその周辺方向に飛び散らさず、被掃除面に当たった吹出し風3は吸込口2に向かって集中して舞い戻る流れとなり、効率良く塵埃を舞い上げて吸塵することができるようになる。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】停止せずに走行方向を変更するために停止せずに掃除領域を掃除するのにかかる時間を減少させることができる、ロボット掃除機及びその制御方法に関する。
【解決手段】ロボット掃除機は、掃除領域を走行しながら確保した位置データに基づいて、掃除を行う区域を設定し、前記掃除を行う区域を掃除できるように掃除経路を予め設定し、前記掃除経路にジグザグ走行経路が含まれると、ジグザグ走行経路に沿って移動中に、曲線走行して方向を転換することによって、走行方向の転換時に、掃除領域を掃除するのにかかる時間を減少させることができる。
(もっと読む)
電気掃除機
【課題】サイドブラシを効果的に用いつつ塵埃の取り残しを低減した電気掃除機を提供する。
【解決手段】電気掃除機11は、床面の種類を検出する床面検出手段を有する。電気掃除機11は、本体ケース12の下部に自律走行用の駆動輪15を回転可能に有する。電気掃除機11は、床面に接地するブレード体35bを備えるサイドブラシ18を、本体ケース12の下部の吸込口24の前方の少なくとも一側に旋回可能に有する。電気掃除機11は、サイドブラシ18の回転を制御する制御手段を有する。制御手段は、床面検出手段により検出した床面の種類に対応して、進行方向の塵埃を吸込口24側へと案内するようにサイドブラシ18を回転させる回転モードと、ブレード体35bが本体ケース12の前方外側に向けて傾斜する所定位置でサイドブラシ18を停止させる停止モードとを切り換え可能である。
(もっと読む)
電気掃除機
【課題】掃除機を被掃除面に接離する際に被掃除面上の塵埃の吹き飛ばしを抑制する排気循環式の電気掃除機を提供する。
【解決手段】ノズル体6と被掃除面とが離れたことを検知した場合に、バイパス風路27を開くと共に、排気風路13のバイパス風路27より下流部を略閉塞させるようにしたので、電動送風機9からの排気流れの大半は、ノズル体6に向かうことなくバイパス風路27を通り、再び電動送風機9に戻される。したがって、被掃除面にある軽い塵埃も吹き飛ばされることはない。
(もっと読む)
電気掃除機
【課題】集塵容器内のフィルターに付着および入り込んだ塵埃の除塵だけでなく、内壁および底部に付着した塵埃も除塵するお手入れの軽減可能な電気掃除機を提供する。
【解決手段】電動送風機2と、掃除機本体1に着脱自在に取り付けられ塵埃を捕集する集塵容器3と、集塵容器3内に配され塵埃を捕捉するフィルター(図示せず)に振動等の衝撃を加えて捕捉した塵埃を取り除く除塵手段45と、フィルターの塵埃を捕捉する側と反対側に風を送る送風ファン21と、除塵手段45と送風ファン21を動作させる電源を供給する直流電源装置47と、除塵手段45と送風ファン21の動作を制御する制御手段42とを備え、送風ファン21でフィルターに送風しながら、除塵手段45を動作させるもので、フィルターに入り込んだ塵埃も取り除けるため、フィルターの除塵性能が向上し、吸込み力低下が軽減され、強い吸込み力が維持される。
(もっと読む)
1 - 20 / 380
[ Back to top ]