
Fターム[3B057DA04]の内容
Fターム[3B057DA04]の下位に属するFターム
Fターム[3B057DA04]に分類される特許
1 - 20 / 293
電気掃除機
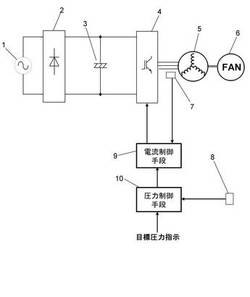
【課題】応答性の高いインバータにより吸込み圧力を制御することにより、作業性の高い掃除機を実現すること。
【解決手段】交流電源1より与えられる交流電力は直流に変換された後、インバータ回路4に入力され任意の周波数の3相交流に変換され、接続されたモータ5およびファン6を任意の回転数で駆動する。電流制御手段9は、モータ5に流れる電流を所望の電流値になるように制御する。さらに圧力制御手段10は、掃除機の吸込み圧力を検出する圧力センサ8の検出値を外部より与えられる目標圧力指示値になるようにモータ5に流れる電流値の目標値を設定することにより、モータ5に流れる電流を制御することによって、掃除機の吸込み圧力を掃除作業性に最適な圧力値に制御することができる。
(もっと読む)
電気掃除機

【課題】電動機駆動でなく吸込み風力で駆動する吸込み具の回転ブラシでも異物の巻き込み等を検知して、異物を取り除くことができる電気掃除機を提供する。
【解決手段】インバータ回路9と、インバータ回路9を制御する制御手段11と、インバータ回路9によって駆動されるブラシレス電動送風機2と、吸込具6内に設けられブラシレス電動送風機2からの吸引風力により駆動する回転ブラシ7と、回転ブラシ7の回転数を検出する回転数検出手段8と、回転数検出手段8で検出した回転ブラシ7の回転数とインバータ回路9から出力されるブラシレス電動送風機2の回転数情報信号とを比較する比較手段10を備え、制御手段11は比較手段10からの比較信号を基にブラシレス電動送風機2の回転数を制御することにより、異物の巻き込みを検知して、回転ブラシの回転を下げて異物を取り除くことができる。
(もっと読む)
電気掃除機
【課題】回転清掃体の運転状態または停止状態の何れにあっても適宜の塵埃除去能力を発揮可能であり電動送風機を含むシステム全体の消費電力を抑制可能な電気掃除機を提案する。
【解決手段】電気掃除機1は、吸込負圧を発生する電動送風機8と、電動送風機8に流体的に接続して吸込負圧が作用する吸込口28を有する底面を被掃除面に向かい合わせて走行可能な吸込口体26と、吸込口28に位置する回転自在な回転清掃体29と、回転清掃体29を回転駆動可能な電動機31と、電動機31の運転または停止を指示するブラシスイッチ24cと、吸込口体26が底面を被掃除面に向けて接地しているか否かを検知する被掃除面検知部32と、電動機31を停止しているときの電動送風機8の回転数よりも、電動機31が運転しかつ吸込口体26が底面を被掃除面に向けて接地していることを被掃除面検知部32が検知しているときの電動送風機8の回転数を低く制御する本体制御部9と、を備える。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】ロボット掃除機の掃除性能を一定に維持できるようなブラッシュ掃除部材の構造及び動作を改善したロボット掃除機並びにその制御方法を提供すること。
【解決手段】本発明の一実施例に係るロボット掃除機は、本体、ブラッシュユニット及びブラッシュ掃除部材を含む。ブラッシュユニットは、前記本体に回転可能に設けられ、前記本体の底に積もった埃を掃き集め、前記ブラッシュ掃除部材は、前記ブラッシュユニットと接触するように前記ブラッシュユニットに向かって突出し、前記ブラッシュユニットに巻かれた異物を除去する第1のブラッシュ掃除突起及び第2のブラッシュ掃除突起を含む。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】掃除空間に存在する障害物により走行が中断することなく掃除作業を行えるように改善された構造を有するロボット掃除機の制御方法を開示する。
【解決手段】このロボット掃除機の制御方法は、本体と、本体を駆動する駆動輪と、駆動輪を有する駆動輪組立体と、を備えるロボット掃除機の制御方法において、駆動輪組立体に設けられた被感知体を感知して基準位置に対する駆動輪の変位を検出し、変位があらかじめ設定された基準範囲内に属するか否か判断し、変位が基準範囲から外れていると判断されると、本体の走行経路を変更する。
(もっと読む)
電気掃除機
【課題】通常の掃除中に騒音や電力消費を増大させずに空気中の浮遊塵埃を効率よく捕集できる、電気掃除機を提供する。
【解決手段】電気掃除機は、空気から塵埃を分離し捕集する集塵部15と、集塵部15へ塵埃を含む空気を流通させるための電動送風機16と、電動送風機16により吸引される空気の流量を検知する風量センサ23と、外部から吸い込んだ空気を清浄化するための空気清浄部30と、空気清浄部30へ空気を吸引する空気清浄用送風機18と、空気清浄用送風機18を駆動するモータ26と、モータ26を制御する制御部と、を備える。制御部は、風量センサ23によって検知された流量に基づいて、モータ26の駆動状態を制御する。
(もっと読む)
室内用集塵装置およびこの装置を機能させるためのプログラム
【課題】掃除ロボットに電力を給電するための充電ステーションの設置において、設置スペースの確保が困難となる場合や、また充電ステーションを小型化すると、床面との接触面積が少なくなり、掃除ロボットと充電ステーションが接続する際、掃除ロボットの一部と充電ステーションが接触して位置が動いてしまい、接続できなくなる場合があった。
【解決手段】床面清掃部120が進入可能な開口領域107と、開口領域107内に床面清掃部120と接続して電力を供給する送電手段108と、床面清掃部120にこの空気清浄部100の配置されている位置を伝えるための誘導信号を発信する誘導信号発信手段106を備え、誘導信号発信手段106から送信された誘導信号を誘導信号受信手段124で受信して、移動手段121により空気清浄部100の開口領域107内に移動することで、送電手段108と受電手段125を接続して自動的に蓄電手段の電力を蓄える。
(もっと読む)
室内用集塵装置およびこの装置を機能させるためのプログラム
【課題】空気清浄機において、吸引している気流に乗って空気清浄機へ引き寄せられた塵埃の一部が近傍で落下し、空気清浄機の周囲に塵埃が溜まりやすくなるという課題があった。また掃除ロボットでは、掃除中の清掃動作により掃除ロボット本体の移動に伴う移動気流や、清掃時の吸引に伴う排気気流などの影響により、掃除ロボット本体の周囲の床面に堆積している塵埃を巻き上げるという課題があった。
【解決手段】状態検出手段108で床面清掃部220が清掃を行っていると判断したときに、空気清浄部100の送風手段104を動作させることで、床面清掃部220で清掃中に舞い上がる塵埃を回収するとともに、床面清掃部220は、誘導信号を受信して空気清浄部100へ移動する際に、空気清浄部100の周囲の清掃を重点的に行うことで、空気清浄部100の周囲に堆積している塵埃を除去する。
(もっと読む)
電気掃除機
【課題】掃除機本体に集塵容器が装着されているか否かを簡単な構成で確実に検出することができる電気掃除機を提供する。
【解決手段】掃除機本体1に設けられ、吸引風を発生させる電動送風機24と、掃除機本体1に着脱自在に設けられ、掃除機本体1に取り付けられたときに吸引風に吸引された塵を捕集する集塵容器11と、電動送風機24が吸引風を発生させる際に電動送風機に24供給される電流を検出する電流検出手段37と、電流が定常状態のときの値と所定の閾値とを比較して、集塵容器11が掃除機本体1に装着されているか否かを検出する集塵容器検出手段35bと、を備えた。
(もっと読む)
電気掃除機
【課題】単純な回路構成で、短い時間で容易にカレントトランスの出力周波数偏差を補正し、電力制御精度バラツキを低減、ひいては高い吸込仕事率を安定して確保できる電気掃除機を提供する。
【解決手段】電源周波数検出手段と、カレントトランス(以降、CTと記載する)を有して電動送風機2の電流を検出する電流検知手段5と、所定の信号入力によって、前記電流検知手段5の出力値又は、出力値から予め決められた数式に従って算出した値を、電源周波数と紐付けして不揮発性の記憶手段6に記憶する調整用の特殊モードAとを有し、通常動作モードでの運転中は、電源周波数と前記記憶した値とを基にCTの周波数偏差量を加味した形で前記電流検知手段5の出力値を補正すると共に、補正後の値に基づいて電動送風機2への通電量を制御する。
(もっと読む)
電気掃除機
【課題】電動機の位相制御時に直接電流値を検出する際にも被清掃面の状態変化を精度よく判別させることができる電気掃除機を提供すること。
【解決手段】吸引力を発生する電動送風機と、塵埃を吸引する床用吸い込み具に内蔵された回転ブラシを駆動する電動機と、電動機に供給される電流を所定の点弧角Aで位相制御する制御手段と、電動機に供給される電流値を直接検出する電流検出手段と、を備え電動機の電流値の検出タイミングはA+(180°−A)×2/3よりも大きい位相時で検出し、検出タイミングで検出された電流値により、被清掃面の種類を判別する電気掃除機。
(もっと読む)
電気掃除機
【課題】電動送風機自体の異常によって発生したモータスパークと、電動送風機の吸引風の風量低下によって発生した一過性のモータスパークとを精度よく区別して検出することができる信頼性の高い電気掃除機の提供。
【解決手段】吸引風を発生させる電動送風機と、電動送風機に流れる交流電流の状態を検出する電流状態検出手段と、電流状態検出手段の出力値に応じて電動送風機の通電量を制御する制御手段と、を備え、制御手段は、電流状態検出手段の出力値が予め定められた第1の基準値未満となる回数が所定時間内に第1の基準回数以上存在している場合、電動送風機への通電量を低下させ、その後、電流状態検出手段の出力値が最初に第1の基準値未満となった直前の電流状態検出手段の出力値に応じて電動送風機への通電量を制御する電気掃除機。
(もっと読む)
汚れ検出手段を組み込んだ清掃走行経路ガイド方法
【課題】汚れ検出手段を組み込んだ清掃走行経路ガイド方法を提供することを課題とする。
【解決手段】汚れ検出手段を組み込んだ清掃走行経路ガイド方法であって、自動清掃装置で実行され、清掃経路を生成して自動清掃装置に未清掃領域の清掃をガイドするために用いられ、未清掃領域内で複数の格子を定義できる。該方法は、まず未清掃領域において自動清掃装置を移動させて汚れを清掃し、また、掃除したゴミ量を継続して検出することで、現位置格子の汚れ具合を取得する。現位置格子の汚れ具合が閾値を超えた時、格子を汚れ格子としてマークする。アルゴリズムを実行し、マークした汚れ格子に基づき、全ての汚れ格子を通過できる最短経路を探索して清掃経路とする。最後に、清掃経路に基づき自動清掃装置が移動して各汚れ格子を通過させ、順番通り各汚れ格子を清掃することである。
(もっと読む)
電気掃除機
【課題】必要以上に電力を消費することなく、特にフローリング上で低騒音で運転でき、さらに、運転モードを表示する表示部とゴミを検出したことを表示する表示部を兼用することにより、視認性がよく、低コストな表示部を実現する。
【解決手段】吸引した空気の中に塵埃が含まれていることを検出するフォトダイオード211を設け、吸口体106の回転ブラシ駆動モータ402の駆動電流を検出する電流検出回路206により、被掃除面の床質を判断し、その床質に応じて、回転ブラシ駆動モータ402の駆動電圧と、電動送風機203の駆動電圧を制御するとともに、回転ブラシ駆動モータ402の駆動電圧を検出し、その駆動電圧に応じた色を発光する緑色発光LED303などと、フォトダイオード211の検出した塵埃の有無に応じて、緑色発光LED303などの点灯と点滅を切り替える発光LED駆動回路305,306を設ける。
(もっと読む)
電気掃除機
【課題】使用者に不快感を与えること無く掃除作業ができる電気掃除機を提供する。
【解決手段】吸引風を発生する電動送風機2と、前記電動送風機2を収納する電動送風機室20と、前記電動送風機室20を内蔵した掃除機本体1と、塵埃を吸引する吸込具10と、前記電動送風機室20とは分離された場所に配されると共に、帯電微粒子水を発生させる静電霧化装置33を収納する静電霧化装置収納室21と、前記電動送風機室20と前記静電霧化装置収納室21とを連通すると共に、前記電動送風機2の排気風の一部を前記静電霧化装置収納室21内に流入させる連通通路50と、前記吸込具10の着脱を検知し、その検知情報に基づいて前記静電霧化装置33への通電を制御する制御部30を備えたもので、静電霧化装置33でのオゾン濃度の上昇を抑制することができるため、使用者に不快感を与えることを防止することができる。
(もっと読む)
電気掃除機
【課題】未だ掃除をしていない箇所へと使用者を案内して部屋中を確実に残らず掃除可能な電気掃除機を提案する。
【解決手段】電気掃除機1は、被掃除面上を走行可能な吸込口体26と、吸込口体26の移動量を算出可能な物理量を測定する移動量測定器35と、移動量測定器35の測定結果から吸込口体26の移動量を算出する移動量算出部71と、移動量算出部71の算出結果から吸込口体26の通過領域を記憶する通過領域記憶部72と、通過領域記憶部72が記憶する吸込口体26の通過領域から吸込口体26の未通過領域を特定する未通過領域特定部73と、未通過領域特定部73が特定した未通過領域を案内する表示を行う案内表示部36と、を備える。
(もっと読む)
電気掃除機
【課題】使用性が高く、集塵性能に優れた電気掃除機を提供する。
【解決手段】吸引風を生成する電動送風機2と、一端が塵埃を吸引する吸込み具31に連結される延長管29と、この延長管29の他端に連結される先端パイプ(図示せず)と、先端パイプまたは延長管29または吸込み具31に設けられ、使用者が掃除をする際に動作させる状態変化を検出する状態変化検出手段(図示せず)と、延長管29または吸込み具31に設けられ床面の状態を検出する床面検出手段(図示せず)と、吸込み具31で吸引された塵埃を検出する塵埃センサ8(集塵検出手段)と、前記3つの検出手段からの信号に応じて、吸込み具31の回転ブラシ(図示せず)及び/又は電動送風機2を制御する信号制御手段4を有するもので、使用者の掃除の状態や床面状況、吸引での塵埃の有無状況をつぶさに検出でき、無駄なエネルギーを使用するのを抑えることができる。
(もっと読む)
吸込口体および電気掃除機
【課題】床面の走行負荷を増加させることなく障害物の近傍では吸込口の真空度を向上できる床ブラシを提供する。
【解決手段】床ブラシ26は、床面Fに少なくとも一部が対向する吸込口を備え、少なくとも前後方向に移動可能なケース体31を有する。床ブラシ26は、ケース体31の前部と障害物A1との当接を検出する前部検出手段38を有する。床ブラシ26は、ケース体31にて吸込口の少なくとも後部に、前部検出手段38によりケース体31の前部と障害物A1との当接を検出すると床面Fに向けて移動することで吸込口の真空度を増加させる突出体40を有する。
(もっと読む)
電気掃除機
【課題】本体引き回し時の障害物等への引っ掛かりによる労力の解消と、引っ掛り状態から容易に回避できる自走機能を備えた電気掃除機を提供すること。
【解決手段】駆動モータ14に連結する走行ローラ10と、電動送風機及び集塵機能を有する電気掃除機本体(以下、本体と称す)1と、本体1に連結するホースと、前記ホースの引張り力を検出する引張り力検知手段からの信号に応じて駆動モータ14を駆動して本体1を走行制御する制御手段を備えると共に、障害物を検知する障害物検知手段23を備え、前記制御手段は前記引張り力検知手段と障害物検知手段23からの信号に応じて、本体1を所定時間TP又は所定距離LP、前進又は後進するよう駆動モータ14を駆動制御するもので、本体引き回しの労力を低減できると共に、本体引き回し中の引っ掛り状態から容易に回避できる自走機能を備えた電気掃除機を提供できるようになる。
(もっと読む)
電気掃除機
【課題】電動送風機を確実に過熱保護しつつ、過熱保護された後の復帰までの時間を短縮した電気掃除機を提供する。
【解決手段】電気掃除機は、掃除機本体を有する。電気掃除機は、電動機53および電動機53により回転して電動機53を冷却する第1風路W1と電動機53を冷却しない第2風路W2とに排気する遠心ファン54を備え掃除機本体に収容された電動送風機36を有する。電気掃除機は、電動送風機36よりも熱容量が小さく、電動送風機36に流れる電流により発熱するシャント抵抗器46を第2風路W2に有する。電気掃除機は、シャント抵抗器46の温度が予め設定した温度閾値を超えると電動送風機36の吸込力を低下させるサーモスタット42を有する。
(もっと読む)
1 - 20 / 293
[ Back to top ]