
Fターム[3B150JA02]の内容
Fターム[3B150JA02]に分類される特許
1 - 20 / 199
ミシン
【課題】布送り機構を動作するモータを他の用途にも使用することが可能なミシンを提供する。
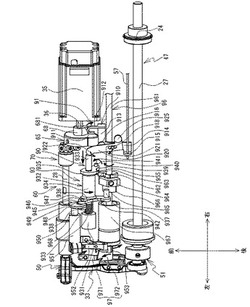
【解決手段】モータ35は駆動軸36を備えている。駆動軸36は溝カム65とカム68を備えている。動力伝達機構60は溝カム65と送り台33に連結する。溝カム65は駆動軸36が第一角度の範囲で一方向及び逆方向に回動することで、動力伝達機構60を動作する。動力伝達機構60は送り台33に水平方向の動作を付与する。カム68の後側には、移動機構91が設けてある。移動機構91の左側には、第一連結部材93が設けてある。第一連結部材93はカム962が作用するコロ955を有し、移動刃972に連結する。カム68は駆動軸36が第一角度の範囲とは異なる第二角度に回動することで、移動機構91を動作する。移動機構91はコロ955をカム962に近接する近接位置に移動させる。
(もっと読む)
ミシンの気体搬送糸通し装置

【課題】ワンタッチでルーパに糸通しするに当たり、気体供給ポンプの気体供給動作中にルーパ糸通し/縫目形成切換機構の縫目形成状態への異常切換を禁止する。
【解決手段】ミシンモータMからの動力を縫目形成時にルーパ7、8、9を含む縫目形成装置30を駆動する駆動軸5又はルーパ糸通し時に気体供給ポンプ41にそれぞれ伝達するためのクラッチ60と、ルーパ糸通し時に縫目形成装置への動力伝達を遮断して気体供給ポンプに動力を伝達し、縫目形成時に縫目形成装置に動力を伝達して気体供給ポンプへの動力伝達を遮断するようにクラッチを切換えるためのルーパ糸通し/縫目形成切換機構90と、気体供給ポンプの気体供給動作中にルーパ糸通し/縫目形成切換機構の縫目形成状態への異常切換を禁止するための切換禁止機構160とを備えている。
(もっと読む)
ミシン
【課題】 縫い速度を調整する調整部を備えたミシンであって、使用者の意図しない要因で縫い速度が変わってしまうことを抑制するミシンを提供すること。
【解決手段】
ベッド部2と、ベッド部2から立設する脚柱部3と、脚柱部3からベッド部2に対向して延在するアーム部4と、アーム部4に設けられ、縫い速度を調整するスライドボリウム10とを備えたミシン1であって、スライドボリウム10は、アーム部4の使用者側に対向する面に突設され、アーム部4に対して相対移動することで縫い速度を調整するスライダー12と、スライダー12に回動自在で、スライダー12より下方に吊り下げて突出する状態と、スライダー12に収納された状態と、を有する調整つまみ13と、を備えるミシン1。
(もっと読む)
ミシン及びミシン用手動プーリ
【課題】カバーと手動プーリとの間から入り込んだ糸が駆動モータに干渉するのを防止する。
【解決手段】ミシン1は、所定方向に回転する駆動軸10と、駆動軸10の左側に配置し、駆動軸10を回転駆動するモータ5と、モータ5における駆動軸10の右側端部を少なくとも覆うように配置したカバー6と、カバー6における駆動軸の右側端部より更に右側に配置し、駆動軸10の右端部に固定した手動プーリ本体21と、カバー6の右端部より左側且つモータ5と手動プーリ本体21との間で手動プーリ本体21に所定間隔をあけて対向する位置に駆動軸10の軸方向と直交して配設した張出部材22とを備えるミシンにおいて、張出部材22は、その外周縁部に駆動軸10の軸方向に延びる複数の爪部22bを有する。
(もっと読む)
ミシン及びミシンの制御方法
【課題】布送りモータの回動方向の切替頻度を減らし、且つ主軸の駆動と布送り機構の駆動の同期を保持することができるミシン及びミシンの制御方法を提供する。
【解決手段】ミシンは、縫針を上下動する主軸を駆動するメインモータと、布を送る布送り機構を駆動する布送りモータを備える。ミシンが備える動力伝達機構は、布送りモータの出力軸の一方向及び逆方向への夫々の回動動作を、布送り機構が水平に一往復揺動する揺動運動に変換して、布送りモータの動力を布送り機構に伝達する。ミシンのCPUは、メインモータの出力軸の回転角である主回転角を検出する(S11)。CPUは布送りモータの出力軸の回転角である布送り回転角を検出する(S13、S19)。CPUは、布送りモータに指示する回転速度を、主回転角と布送り回転角を用いて算出する(S16、S22)。
(もっと読む)
ミシン
【課題】布送りモータの回動方向の切替頻度を減らし、布送りモータにかかる負荷を低減できるミシンを提供する。
【解決手段】布送りモータ35の駆動軸36は所定範囲内の角度で往復回動する。中間作用腕38は水平送り軸28に取り付けてある。送り腕41の一端はモータ35の駆動軸36の先端に回転可能に連結してある。送り腕41の他端は連結部45において送り腕42の一端に回転可能に連結してある。送り腕42の他端は中間作用腕38の先端に回動可能に連結してある。布送りモータ35の駆動軸36が所定範囲内の角度を往復揺動すると、連結部45は、送り腕41と送り腕42が一直線上に位置する中間位置の前後に往復移動する。故に動力伝達機構40は、駆動軸36の一方向及び逆方向への夫々の回動を、中間作用腕38の先端を上下方向に一往復揺動させる揺動運動に変換できる。
(もっと読む)
刺繍縫い可能なミシン
【課題】 刺繍縫いを従来より広い範囲で行うことができ、且つミシンの内部機構が占有するスペースを極めて有効に使用することができる刺繍縫い可能なミシンを提供する。
【解決手段】 ベースキャリッジ5に中間キャリッジ6が、該中間キャリッジ6に先端キャリッジ7がそれぞれY方向に往復動自在に設けられ、前記ベースキャリッジ5には、第1ガイド輪8a,8bに巻き掛けてモータにより駆動する第1ループ状ベルト9が備えられ、該第1ループ状ベルト9の回動にて前記中間キャリッジ6が往復動すること。該中間キャリッジ6には第2ガイド輪10a,10bに巻き掛けられてなる第2ループ状ベルト11が装着され、該第2ループ状ベルト11の両第2ガイド輪10a,10b間における正逆異なる方向に移動する2つの適宜のベルト部位の一方側に前記ベースキャリッジ5が,他方側に先端キャリッジ7がそれぞれ連結固着されてなること。
(もっと読む)
刺繍機
【課題】 糸切れの発生時に、上糸が切れているか、下糸が切れているかを安定して判別することができ、オペレータの負担を軽減できるようにする。
【解決手段】 糸切れセンサ16により糸切れの発生を検出したときに、ジャンプ機構27によりミシン針25のジャンプ制御を行いつつ、主軸9の回転を減速させる。主軸9が基準位置まで回転すると、糸繰出し制御を開始して前記ジャンプ制御を解除し、この状態で上糸掛機構35を作動させて刺繍糸Sの先端側を上糸掛片39に巻き掛けるようにする。下糸切れの場合、天秤23の駆動に伴う刺繍糸Sの繰出しを糸切れセンサ16により検出できる。上糸切れの場合は、上糸掛機構35を用いた刺繍糸Sの繰出しが行われないので、糸切れセンサ16の糸車18が回転することはなく、糸切れセンサ16により上糸切れを検出できる。
(もっと読む)
ミシン及びミシンの制御方法
【課題】主軸と布送り機構を別のモータで駆動する場合に、主軸と布送り機構の同期が乱れた状態で縫製を行うことを防止できるミシン及びミシンの制御方法を提供する。
【解決手段】ミシンは、主軸を駆動するメインモータと布送り機構を駆動する布送りモータを備える。ミシンはメインモータ及び布送りモータの出力軸の回転角を取得する(S51、S56)。ミシンは、メインモータの回転角と布送りモータの回転角が同期するように2つのモータを駆動する。ミシンは、メインモータの回転角に対応して布送りモータの出力軸が位置すべき目標回転角を、メインモータの回転角から算出する(S57)。ミシンは、算出した目標回転角と、実際の布送りモータの回転角の偏差を算出する(S58)。算出した偏差が閾値よりも大きい場合(S59:NO)、ミシンは2つのモータが同期していないことを報知する(S61)。
(もっと読む)
ミシン及びミシンの制御方法
【課題】主軸と布送り機構を別のモータで駆動する場合に、縫製の速度が変化しても主軸の駆動と布送り機構の駆動の同期を保持できるミシン及びミシンの制御方法を提供する。
【解決手段】ミシンは、縫針を上下動する主軸を駆動するメインモータと、布を送る布送り機構を駆動する布送りモータを備える。ミシンはメインモータ及び布送りモータの出力軸の回転角を取得する(S11、S13)。ミシンは、メインモータの回転角に対応する布送りモータの出力軸が位置すべき目標回転角を、メインモータの回転角から設定する(S14)。ミシンは、設定した目標回転角と、実際の布送りモータの回転角の偏差を算出する(S15)。ミシンは算出した偏差に基づいて、布送りモータに指示する回転速度を算出する(S16)。
(もっと読む)
ミシン
【課題】布送り機構の水平方向の動作と主軸の回転を別のモータで駆動する場合に、電力供給停止時の不具合の発生を防止することができるミシンを提供する。
【解決手段】ミシンは、縫針を上下動する主軸を駆動するメインモータと、布を送る布送り機構を駆動する布送りモータを備える。ミシンの平滑回路は、メインモータの減速時に生じる回生電力を布送りモータに供給することができる。ミシンは、外部電力の供給がある場合(S11:YES)、メインモータと布送りモータが同期するよう2つのモータを駆動する(S13,S14)。縫製の実行中に外部電力が閾値未満に低下すると(S11:NO)、ミシンは、メインモータと布送りモータの同期を保持しつつ、メインモータの回生電力で布送りモータを駆動し(S23)、2つのモータを停止する(S26)。
(もっと読む)
ミシン及びミシン制御プログラム
【課題】モータのトルク指令値を算出するためのゲイン値を駆動状況に応じて増減することができるミシン及びミシン制御プログラムを提供する。
【解決手段】ミシンのCPUはミシンモータに対する回転速度の指令値Sを取得する(S11)。CPUはミシンモータの回転速度の検出値Nをエンコーダにより取得する(S12)。指令値Sと検出値Nの偏差ΔNを算出する(S13)。CPUはミシンの駆動状況に応じた増減割合で、ミシンモータのトルク指令値Tを算出するためのゲイン値を偏差ΔNの増減に従って増減する(S14〜S17、S21〜S25)。CPUは設定したゲイン値に偏差ΔNを乗じてトルク指令値Tを算出する(S29)。
(もっと読む)
ミシン
【課題】ミシンベッドが大型化することなく、縫製の不具合を早期に検知できるミシンを提供する。
【解決手段】ミシン1は、加工布を載置するミシンベッド2と、ミシンベッド2の内部に設けられ加工布を所定の送り方向に移動させる布送り機構と、ミシンベッド2に設けられ加工布の下面の第一範囲を撮像する第一撮像手段と、加工布の下面の第一範囲とは異なる第二範囲を撮像する第二撮像手段とを備え、第一撮像手段および第二撮像手段により撮像された送り方向に移動する加工布の下面のそれぞれの画像を合成し、合成された合成画像を表示部7に表示する。
(もっと読む)
ミシン
【課題】 加工布を手で移動させながらフリーモーション縫製を行う場合に、従来よりも使い勝手が良く、縫い針の動作について微妙な調整が可能なミシンを提供する。
【解決手段】 加工布100に対して縫製を行う縫い針2の動作を操作部10により操作するミシン1において、加工布100を張設する刺繍枠50の周縁50aに操作部10が設けられる構成とした。
(もっと読む)
モータカバー及び該モータカバーを備えたミシン
【課題】ミシンのモータを容易に露出状態にでき、且つモータの外周面の全周に沿って効率よく風を流すことができるモータカバー、及び該モータカバーを備えたミシンを提供する。
【解決手段】モータカバー70は、モータ30と遠心ファン53を備えたミシンに装着する。モータ30は柱状の胴部31を有し、胴部31の軸心部分に保持した出力軸12を回転する。遠心ファン53はモータ30の軸方向一端側に接続して出力軸12と共に回転しモータ30へ風を送る。モータカバー70は筒部75を備える。筒部75は筒状を成し、モータカバー70をミシンに装着した状態で遠心ファン53から胴部31へ延び、且つ胴部31の内少なくとも遠心ファン53側の外周を覆う。筒部75は、胴部31を覆う位置に、胴部31と一定の距離Lを保持し且つ胴部31の外周面に沿って延びる部分を有する風案内部76を備える。
(もっと読む)
ミシン
【課題】モータを確実に位置決めし且つモータから発生する熱を容易に放出することができるミシンを提供する。
【解決手段】ミシンは機枠とモータ30を備える。モータ30はステータ32とモータフレーム33を備える。ステータ32は出力軸12を回転する。モータフレーム33は、ステータ32の内、出力軸12における軸方向の一方が突出した状態でステータ32の外周を覆う。機枠は固定壁11、装着部46、露出口48を備える。固定壁11はモータ30を固定する。装着部46は固定壁11の壁面から突出し、ステータ32の内モータフレーム33から突出した部分の外周に接触してステータ32の位置決めを行う。露出口48は装着部46に形成し、ステータ32を露出して装着部46の外部との間の通気を行う。
(もっと読む)
モータ及び該モータを備えたミシン
【課題】ファンから生じた風をモータ外周面に沿って効率良く流してモータを冷却することができるモータ、及び該モータを備えたミシンを提供する。
【解決手段】モータ30は、回転する出力軸12を有しミシンに装着する。モータ30の胴部31は、出力軸12を回転するステータ32を備える。胴部31は軸心部分に出力軸12を回転可能に保持する。モータ30は、ファンの回転軸と出力軸12とが同軸となる状態で該ファンを出力軸12に接続する。ファンは回転すると胴部31側に風を送る。モータ30は胴部31のファン側の外周に縮径部36を備える。縮径部36はファン側に向けて径が縮小するように形成してある。
(もっと読む)
プーリ及び該プーリを備えたミシン
【課題】壁部がモータを覆っている場合でも壁部の外部から内部のモータへ十分に風を送ることができるプーリ、及び該プーリを備えたミシンを提供する。
【解決手段】プーリ50は、モータ及び壁部を有するミシンに装着する。プーリ50は、モータの一端側に接続してモータの出力軸と共に回転する。ミシンの壁部はモータを覆い且つ開口部を有する。開口部はプーリ50の少なくとも一部を外部へ露出する。プーリ50は外周壁51、側壁52、通気穴、遠心ファン53を備える。外周壁51はモータの出力軸を中心軸とする筒状である。側壁52は外周壁51の内側を閉塞する。通気穴は側壁52に形成する。遠心ファン53は側壁52のモータ側に位置し、モータの動力によって回転することで通気穴から壁部の内部へ気体を取り込みモータへ風を送る。
(もっと読む)
ミシン
【課題】モータへ十分に風を送りモータを冷却することができるミシンを提供する。
【解決手段】ミシンは機枠とモータ30を備える。モータ30は出力軸12、ロータ39、ステータ32を備える。出力軸12は機枠内を延びる。ロータ39は出力軸12の一端側に固定する。ステータ32はロータ39と出力軸12を回転する。出力軸12の他端側は縫製機構と接続する。モータ30はモータフレーム33を備える。モータフレーム33は固定部37を備える。固定部37はステータ32の内、出力軸12における軸方向の一方が突出した状態でステータ32の外周を覆い、且つモータ30を機枠に固定する。機枠の固定壁11は、モータフレーム33の固定部37を壁面の外側に固定する。
(もっと読む)
ミシン
【課題】プーリ及びミシン機枠の大きさを増大することなく、糸の侵入によってエンコーダが破損する可能性を下げることができるミシンを提供する。
【解決手段】ミシンはモータ30とプーリ50を備える。プーリ50は出力軸12と共に回転する。モータ30の胴部31は出力軸12を回転するステータ32を備え、ステータ32の軸心部分に出力軸12を回転可能に保持する。モータ30はエンコーダ40を備える。エンコーダ40は胴部31の軸方向一端側に接続して出力軸12の回転を検出する。プーリ50は外周壁51と遠心ファン53を備える。外周壁51は回転軸を中心とする筒状である。遠心ファン53は外周壁51の内側に位置し、モータ30の動力によって回転することでモータ30へ風を送る。外周壁51は遠心ファン53よりもモータ30側へ延びており、エンコーダ40の少なくとも一部の外周を覆う。
(もっと読む)
1 - 20 / 199
[ Back to top ]