
Fターム[3B150NA02]の内容
Fターム[3B150NA02]の下位に属するFターム
Fターム[3B150NA02]に分類される特許
1 - 20 / 53
ミシン
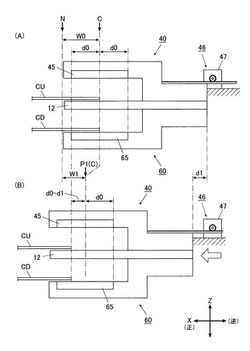
【課題】縫い代を安定して検出する。
【解決手段】被縫製物を交差方向送る主送り機構20と横送り機構と、被縫製物の縫い代を検出する端部検出装置40,60と、縫い代が目標値となるように横送り機構を制御するミシン100において、端部検出装置は、光源と、複数の受光部が被縫製物幅方向に沿って複数並んで設けられ、被縫製物の側端部により遮蔽された照射光から当該被縫製物の側端部の被縫製物幅方向の位置検出を行う検出素子45,65とを有し、端部検出装置を被縫製物幅方向に沿って移動させるアクチュエータ47,67と、縫い代の目標値の変化に応じて、アクチュエータの移動制御を行う制御部13とを備えている。
(もっと読む)
二重環縫いの縫目のほつれ止め方法、二重環縫いミシンの縫目のほつれ止め装置及び二重環縫いの縫目構造

【課題】1本針二重環縫いの縫目のほつれの発生を、針糸及びルーパ糸の付与張力の大小に関係なく、確実且つ強力に防止することができる二重環縫いの縫目のほつれ止め方法及びほつれ止め装置を提供する。
【解決手段】1本の針が針板下に形成する針糸ループ20aを、針の上下動経路に略直交する方向に進退動作可能なルーパの進出により捉え、ルーパ糸10により針糸ループを他糸ルーピングして形成される二重環縫いの縫目のほつれを防止する方法であって、ルーパを進出状態として通常縫製を終了した後、該ルーパが捉えた針糸ループを針の下降位置よりもルーパの進出端側に位置保持させた状態を、針がルーパに捉えられた針糸ループを通って下降するまで維持し、針糸ループの位置保持を解除して少なくとも1針分の縫製動作を行わせることによって、針が保持する針糸により針糸ループを自糸ルーピングする。
(もっと読む)
二本針ミシン
【課題】アクチュエータを針棒回動台の外部に搭載する。
【解決手段】二本の針棒を支持する針棒回動台15と、二本の針棒を回動させる針棒回動機構30と、二本の針棒を保持するラッチ機構50と、ラッチ機構の保持を解除させる作動部材16と、作動部材の位置切り替えを行うアクチュエータ61と、アクチュエータから作動部材に位置切り替え動作を伝達する差動伝達機構63とを備え、差動伝達機構は、アクチュエータから回動が入力される入力部材631と、回動動作により作動部材に位置切り替え動作を付与する出力部材632と、入力部材から出力部材に回転を反転して伝える伝達体64と、伝達体を針棒回動台の回動中心線回りに周回可能に支持する回動支持体65とを備え、針棒回動機構の駆動源となる回動モータ31をミシンフレームに設け、針棒回動台への回動動作入力時に、針棒回動台への回動角度の半分の回動角度を回動支持体に入力する。
(もっと読む)
ミシン
【課題】送り歯沈下位置と送り歯上昇位置とに送り歯を切り替えるにあたり、既設の送り調節器用のアクチュエータで兼用し、送り歯沈下機構を廉価に製造させるのに有利なミシンを提供する。
【解決手段】送り機構21は、送り歯22に搬送運動を実行させる送り機構21と、送り歯22の送り量を変更するための送り調節器13と、送り調節器13の送り量を変更するためのアクチュエータ30と、送り歯22を針板上面よりも突出可能とさせる送り歯上昇位置と送り歯22を針板上面よりも沈下させる送り歯沈下位置とに送り歯22を切り替えるための可動子41と、アクチュエータ30の作動により可動子41を送り歯沈下位置に切り替える送り歯沈下モードと、アクチュエータ30の作動により可動子41を送り歯上昇位置に切り替えて送り歯22の搬送運動を可能とさせる送り歯上昇モードとを切り替える沈下上昇切替機構40とを備えている。
(もっと読む)
ミシン及びミシンの制御方法
【課題】主軸と布送り機構を別のモータで駆動する場合に、主軸と布送り機構の同期が乱れた状態で縫製を行うことを防止できるミシン及びミシンの制御方法を提供する。
【解決手段】ミシンは、主軸を駆動するメインモータと布送り機構を駆動する布送りモータを備える。ミシンはメインモータ及び布送りモータの出力軸の回転角を取得する(S51、S56)。ミシンは、メインモータの回転角と布送りモータの回転角が同期するように2つのモータを駆動する。ミシンは、メインモータの回転角に対応して布送りモータの出力軸が位置すべき目標回転角を、メインモータの回転角から算出する(S57)。ミシンは、算出した目標回転角と、実際の布送りモータの回転角の偏差を算出する(S58)。算出した偏差が閾値よりも大きい場合(S59:NO)、ミシンは2つのモータが同期していないことを報知する(S61)。
(もっと読む)
ミシン及びミシンの糸切り方法
【課題】糸切りの際の電力消費の増大を回避できるミシン及びミシンの糸切り方法を提供する。
【解決手段】糸切り信号が入力されてからt5タイミングで逆転ソレノイドをONして布の送り方向を逆転させる。次いで、t8タイミングで糸切りソレノイドをONして上糸及び下糸を切断する。つまり、縫い目の最終針の針落ち点を1針手前と同等の位置に落としてから、上糸及び下糸を切断する。これにより、糸切り後の布の生地裏において縫い目端部に残る上糸と下糸の残り長さを揃えることができる。さらに逆転ソレノイドをOFFした後で、糸切りソレノイドをONするので、逆転ソレノイドのON期間と、糸切りソレノイドのON期間とが重複しない。これにより、糸切り時における電力消費の増大を回避できる。
(もっと読む)
プーリ及び該プーリを備えたミシン
【課題】壁部がモータを覆っている場合でも壁部の外部から内部のモータへ十分に風を送ることができるプーリ、及び該プーリを備えたミシンを提供する。
【解決手段】プーリ50は、モータ及び壁部を有するミシンに装着する。プーリ50は、モータの一端側に接続してモータの出力軸と共に回転する。ミシンの壁部はモータを覆い且つ開口部を有する。開口部はプーリ50の少なくとも一部を外部へ露出する。プーリ50は外周壁51、側壁52、通気穴、遠心ファン53を備える。外周壁51はモータの出力軸を中心軸とする筒状である。側壁52は外周壁51の内側を閉塞する。通気穴は側壁52に形成する。遠心ファン53は側壁52のモータ側に位置し、モータの動力によって回転することで通気穴から壁部の内部へ気体を取り込みモータへ風を送る。
(もっと読む)
ミシン
【課題】糸払いのミスを低減する。
【解決手段】糸切り装置と糸払い機構70とそれらの制御手段100とを備えるミシン10において、縫い針11の上下動と同じ周期で回転を行う駆動軸の軸角度の検出手段22を備え、制御手段が、検出手段の検出に基づいて、糸切り装置により上糸が切断されるより先に初期位置から動作位置へのワイパの前進動作が行われるように駆動手段73を制御することを特徴とする。
(もっと読む)
ミシン
【課題】針棒に打刻針を装着して打刻加工を実行することを可能としたミシンにおいて、打刻針の取付け高さ位置の判定を、ユーザの主観によることなく正確に行い、ひいてはユーザによる打刻針の取付け高さ位置の調整作業を容易に行う。
【解決手段】針棒8に、打刻針を上下位置調整可能に保持した打刻針保持装置を取付ける。針棒ケース7にカメラモジュール59を設ける。制御回路は、高さ判定モードの実行が指示されると、テスト用の被加工物に対する打刻針によるテスト打刻動作を実行させ、被加工物の打刻痕を、カメラモジュール59により撮影させる。制御回路は、撮影画像に基づいて打刻痕の大きさを検出し、基準値と比較することにより、打刻針の取付け高さ位置を判定し、その判定結果を液晶ディスプレイ46に表示させる。
(もっと読む)
多針ミシン
【課題】針棒毎の累積針数を偏よらないようにすることで、縫針の交換や注油等のメンテナンスの効率化を図ることができる多針ミシンを提供する。
【解決手段】多針ミシンにおいて、制御装置は、複数の部分模様の縫製に必要な針数nを当該複数の部分模様毎に取得し(ステップS23)、部分模様の縫製に供する針棒を決定するために、その取得した針数nに基づいて、複数の針棒間で当該針棒毎の針数Nb1〜Nb6が偏らないように複数の針棒に複数の上糸を割り当てるように構成されている(ステップS24〜S27)。
(もっと読む)
ボタン穴かがりミシン
【課題】ボタン穴かがり縫いの作業性を向上できるボタン穴かがりミシンを提供する。
【解決手段】ボタン穴かがりミシン(20)は、縫い針(41)を支持した状態で上下動する針棒(40)と、上下方向及び水平方向に移動可能に配設され、下降位置において被縫製物の縫い位置近傍を押さえる布押さえ(70)と、前記針棒を旋回させる旋回手段(旋回モータ84)と、縫い糸を交換する際に前記針棒を旋回手段により180°旋回させる指令信号を出力する操作手段(交換モードキー90d)を備えたボタン穴かがりミシンにおいて、前記操作手段が操作される毎に、前記針棒を180°反転させるように前記旋回手段を制御する制御手段(CPU13)を備える。
(もっと読む)
ミシン
【課題】縫製中でも自在に糸張力を補正する。
【解決手段】縫い針を上下動させる針上下動機構と、縫い針に対して被縫製物を相対的に位置決めする位置決め機構と、糸張力を縫い糸に付与する糸調子装置と、縫製データに基づいて位置決め、糸張力付与及び縫製速度の制御を行う動作制御手段1000とを備え、縫製データ71aに基づく縫製の実行中に当該データに定められた糸張力に対して縫製パターンの全針に及ぶ補正データの入力を受け付ける糸張力補正手段74を備え、動作制御手段は、糸切りを伴うことなく、入力直後の縫い目から補正データに応じた糸張力で縫製を行うことを特徴とする。
(もっと読む)
打刻データ作成装置及び打刻データ作成プログラム
【課題】刺繍縫製可能なミシンを用いてシート状の被加工物に対する小孔形成動作を実行するための打刻データを作成するものにあって、被加工物に対する所定の模様の描画と、その模様の輪郭に沿った被加工物の切断との双方を可能とする打刻データを作成する。
【解決手段】針棒ケース7の特定の一部の針棒8に、縫針9に代えて打刻針を装着可能とする。移送機構18のキャリッジ19に、シート状の被加工物を保持する保持体を取付可能とする。制御回路は、打刻データに基づいて、被加工物に対する小孔形成動作を実行させる制御を行う。制御回路は、所定の模様のラインデータから、被加工物に対し複数の小孔により所定の模様を描画するための描画データと、被加工物に対し模様の輪郭に沿って複数の小孔を連続的に形成することにより輪郭を切断するためのカットデータとの2種類を含む打刻データを作成する。
(もっと読む)
打刻データ作成装置及び打刻データ作成プログラム
【課題】刺繍縫製可能なミシンを用いてシート状の被加工物に対して小孔形成動作を実行する打刻データを作成するにあたり、被加工物の模様部の輪郭に沿った切断作業を良好に行うことができる打刻データの作成を可能とする打刻データを作成する。
【解決手段】針棒ケース7の特定の針棒8に、縫針9に代えて打刻針を装着可能とする。移送機構18のキャリッジ19に、シート状の被加工物を保持する保持体を取付可能とする。制御回路は、打刻データに基づいて、被加工物に対する小孔形成動作を実行させる制御を行う。制御回路は、模様のラインデータから、被加工物に対し模様の輪郭に沿って小孔を連続的に形成することにより輪郭を切断するためのカットデータを作成する。カットデータを、輪郭のうち小孔が形成されない非切断領域を間欠的に生じさせる一次カットデータと、その後に小孔形成動作が実行される残りの二次カットデータとに分割する。
(もっと読む)
刺繍枠及びミシン
【課題】表示器との位置合わせを行う装着機構部を備えることにより、加工布と縫製される刺繍模様との位置合わせが容易且つ正確な刺繍枠及びミシンを提供する。
【解決手段】刺繍枠20は、ミシン10の刺繍枠移送装置21に取り付けられ、ミシン10と協働して刺繍模様を縫製する。刺繍枠20は、刺繍枠本体31、表示器23及び装着機構部24を備える。加工布を保持する刺繍枠本体31は、刺繍模様を縫製するための縫製可能領域A2を有する。表示器23は、少なくとも縫製の対象となる刺繍模様を表示する表示領域A1を有する。装着機構部24は、刺繍枠本体31の縫製可能領域A2の少なくとも一部が表示領域A1と重なる位置に表示器23を着脱可能に装着する。表示器23は、裏面側が透視可能な電子ペーパ42を有しているので、表示領域A1の下方に位置する刺繍枠本体31に保持された加工布を透視しながら、刺繍模様と加工布とを位置合わせすることができる。
(もっと読む)
ミシン
【課題】縫製パターンデータに被縫製物の高さデータを容易に設定する。
【解決手段】縫い針108を上下動させるミシンモータ2aと、縫製時に被縫製物の浮き上がりを防止する中押さえ29と、縫い針に同期して中押さえに上下動させる中押さえ上下動機構M1と、中押さえモータ42により中押さえの下死点高さを調整する中押さえ高さ調節機構M4と、中押さえの下降接触時の押圧により中押さえが停止するように中押さえモータを制御する中押さえ高さ制御手段73と、中押さえの下降接触による中押さえモータの出力軸の状態変化時の中押さえの高さから被縫製物の厚さを求める厚さ取得処理手段73と、縫製パターンデータに針数の順番に対応づけて被縫製物の厚さを記録する厚さ記録手段73とを備えている。
(もっと読む)
刺繍データ作成装置および刺繍データ作成プログラム
【課題】刺繍模様が自然な縫目によって表現される刺繍データを作成可能な刺繍データ作成装置および刺繍データ作成プログラムを提供する。
【解決手段】刺繍データ作成装置では、画像データに基づいて作成された複数の線分データについて、開始線分L1の終点から候補線分の端点までの距離d1が接続候補距離閾値dの範囲内にあり(S43:YES)、かつ、開始線分L1と候補線分との角度差α1が接続候補角度閾値αの範囲内にある場合に(S45:YES)、その候補線分を開始線分L1と接続される候補線分L2として設定する(S49)。そして、候補線分L2を開始線分L1に接続することで、候補線分L2を現在の角度連続線群データに接続する(S53)。さらに、端点同士が近い順に接続された角度連続線分群データに基づいて、刺繍ミシンでの刺繍縫製に使用される刺繍データを作成する。
(もっと読む)
鳩目ボタン穴かがりミシン
【課題】旋回モータの原点検索を正確に行う。
【解決手段】ミシンフレーム2のアーム部2c内に針棒旋回台が配置され、ベッド部2a内にルーパ土台47及び旋回機構60が配置されたボタン穴かがりミシン10において、旋回機構は、旋回モータ61と、旋回モータに連結された主動プーリ62と、ルーパ土台に連結された第一の従動プーリ63と、ベッド部内からアーム部内の針棒旋回台に回転力を伝達する伝達軸64と、伝達軸に連結された第二の従動プーリ5と、主動プーリから各従動プーリに回転力を伝達するタイミングベルト66とを備え、主動プーリと第二の従動プーリ又は第一の従動プーリと第二の従動プーリの回転比率を異なるものとし、回転比率が異なる二つのプーリの各々に旋回モータの原点検出手段68,69を設けたことを特徴とするボタン穴かがりミシン。
(もっと読む)
ミシン
【課題】糸切りカムの解除不良を防止する。
【解決手段】糸切断を行う動メスと、ミシンモータにより回る糸切りカム102と、動メスに切断動作を付与するメス駆動腕101と、メス駆動腕上からカムに係合可能な従節体103と、メス駆動腕を定位置に保持し、その保持状態が解除されると従節体を係合位置に保持するストッパ107と、メス駆動腕をストッパから解除するクラッチ部材105と、クラッチ部材に動作を付与するアクチュエータ106と、アクチュエータの駆動タイミングを定める下位置センサ13と、ミシンモータ停止制御の開始タイミングを定める上位置センサ12とを備え、ミシンモータの停止制御において上位置センサ12が示す主軸角度まで逆回転が検出されたときにはエラー報知を行う。
(もっと読む)
ミシンの針上下動機構
【課題】針棒ストロークの調節を容易に行う。
【解決手段】ミシンモータから動力を得て支軸39回りで回動を行う第一のベルクランク31と、第一のベルクランクに連結された第一の伝達リンク32と、第一の伝達リンク32と針棒側との間に介在する第二の伝達リンク33と、第一又は第二の伝達リンクに連結されて連結点38を移動可能な第二のベルクランク54と、第二のベルクランクの他端側に連結され、初期位置と前進位置に移動可能で、連結点を第一ベルクランク31の支軸39に重なる位置と前進位置への移動により重なる位置より離間した離間位置とに移動させるアクチュエータ52とを備え、第二のベルクランク又はアクチュエータ52に当接する第1ストッパ56を進退可能に連結し、アクチュエータの前進位置を調節する調節モータ53を有し、これにより連結点38の離間位置を調節して、針棒ストロークを調節する。
(もっと読む)
1 - 20 / 53
[ Back to top ]