
Fターム[3C007AS29]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 宇宙用、航空用 (15)
Fターム[3C007AS29]に分類される特許
1 - 15 / 15
連結移動装置
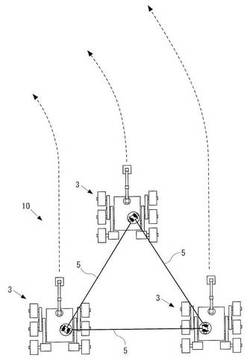
【課題】移動体が目標地点へ移動している途中で、バッテリー残量が低下しても、当該移動体が継続して移動できるようにする。
【解決手段】連結移動装置10は、不整地上を移動する複数の移動体3と、これらの移動体3を連結し電力を伝達可能な線状体5とを備える。複数の移動体3が、線状体5で連結された状態で移動する。各移動体3は、不整地上を移動するための移動手段と、給電されることにより該移動手段を駆動する駆動装置と、移動用エネルギーを蓄積し該エネルギーを用いて駆動装置に給電する給電装置と、を有する。各移動体3の給電装置は、他の移動体の給電装置から線状体5を介して電力を受けられるようになっている。
(もっと読む)
マーシャロイド(MARTIALOID)

【課題】宇宙で生体が生存競争するためのマーシャルアート(martial art)のメカニズムを有していて、勝負服一式の型で、宇宙へ生体が遠征するためのヒューマノイドロボットが今までなかった。
【解決手段】宇宙へ生体が遠征するためのヒューマノイドロボットに宇宙で生体が生存競争するためのマーシャルアートのメカニズムをそなわせたり、ヒューマノイドロボットを勝負服一式の型にしてヒューマノイドロボット本体内にヒューマノイドロボット本体内の生体が呼吸したりヒューマノイドロボット本体内の温度を調節するためのあたたかいもしくはつめたい酸素を自動で入れるためのメカニズムと酸素の入れ物を有する密室製の生命維持装置をそなわせたりすることでヒューマノイドロボットを用いて宇宙へ生体が遠征することが出来るようになる。
(もっと読む)
エンジェロイドゼロ(ANGELOIDZERO)
【課題】宇宙で生体が生存競争するためのマーシャルアート(martial art)のメカニズムを有していて、背中にメカニカルもしくは人工的な両翼と両腕を有する人型のロボットが今までなかった。
【解決手段】人型のロボットに宇宙で生体が生存競争するためのマーシャルアートのメカニズムと、人型のロボットの背中にメカニカルもしくは人工的な両翼と両腕をそなわせる。
(もっと読む)
走行ロボット
【課題】従来の走行ロボットは、各駆動輪や各関節部にモータや回転駆動手段を備えていたので、重量が増すと共に、制御も複雑になり易く、小型軽量化や走行性及び信頼性のさらなる向上が要望されていた。
【解決手段】車体Bの前部に、ロール軸回りに回動自在なサスペンションアーム1と、サスペンションアーム1の両端部に対してピッチ軸回りに回転駆動可能な左右の前部支持脚2を備えると共に、各前部支持脚に少なくとも一つの駆動輪Wfを夫々備え、車体Bの後部に、ピッチ軸回りに回転駆動可能な左右の後部支持脚3と、各後部支持脚3に対してピッチ軸回りに回動自在な旋回脚4を備えると共に、各旋回脚4の両端部に駆動輪Wrを夫々備えた走行ロボットRとした。モータ類を削減して小型軽量化や制御の簡素化を実現すると共に、常に全ての駆動輪を接地させることを可能にして、走行性能のさらなる向上を実現し、月や惑星での探査活動に非常に好適なものとなる。
(もっと読む)
遠隔操作支援装置
【課題】
対象物の位置や姿勢が事前に判らない場合においても、任意の方向から対象物を確認することを可能としつつ、対象物の遠隔操作を支援することが可能な遠隔操作支援装置を提供することである。
【解決手段】
各対象物の形状の計測データを三次元認識処理し、各対象物の形状および姿勢が反映された各対象物モデル表現を生成し、ロボットの各軸の状態が反映されたロボットモデル表現を生成し、三次元空間の指定された視点および視線方向による対象物モデル表現およびロボットモデル表現を画面上に三次元的に表示し、各対象物上の点を基準座標系の三次元座標に変換し、ロボット上の点を前記基準座標系の三次元座標に変換し、画面上に表示された前記各対象物モデル表現から一の対象物を選択し、選択された操作対象物と前記ロボットとに基づき、前記三次元画像生成手段における視点および視線方向を自動で指定する。
(もっと読む)
真空用接触センサ
【課題】構成簡易ながら検知範囲を広く設定し得る上に死角が少なく、かつ接近感知部を軽量とすることが可能な真空用接触センサを得る。
【解決手段】接近感知部10は、互いに接触または近接すると電気的に導通するように構成された可撓性を有する第1および第2の導電性薄板11,12を、内外方向に互いに離間した状態でアーチ状に湾曲形成してなるものであり、マニピュレータ3の先端表面部の全域を覆うように配置されている。マニピュレータ3が他物体と衝突する前に接近感知部10が他物体に当接して変形し、第1および第2の導電性薄板11,12が互いに接触または近接して電気的に導通したことを導通検出回路部20が検出することにより、マニピュレータ3が他物体と接近したことを検知する。
(もっと読む)
シミュレーション及びミッションの区分を備えたロボットシステム
【課題】より低い費用で実施され、人的干渉がより少なく、より迅速でより効率的なミッションを提供することができる改良したロボット及びロボットシステムを提供する。
【解決手段】物理環境においてミッションを達成するロボットが、本体と、本体に結合され本体を動作させるように構成されるオペレーティングシステムとを備える。該オペレーティングシステムは、入力を受信すると共に該入力に基づいて物理環境に対応するシミュレートされた環境でのミッションをシミュレートしてシミュレート結果を生成するように構成されるシミュレーション区分207と、シミュレート結果を受信すると共に該シミュレート結果に基づいてミッションを達成するための動作を決定するように構成されるミッション区分206とを含む複数の区分に分割される。
(もっと読む)
遠隔操作支援装置および遠隔操作支援プログラム
【課題】対象物の位置や姿勢が事前に判らない場合においても、任意の方向から対象物を確認することを可能としつつ、対象物の遠隔操作を支援できるようにする。
【解決手段】環境データ取得手段21aは、レーザスキャナ13にて計測された対象物11上の点群データを環境データ15として取得し、対象物モデル表現手段21bは、対象物11についての環境データ15に基づいて三次元認識処理17を行うことにより、対象物11の形状および姿勢が反映された対象物モデル表現18を生成し、ロボットモデル表現手段21cは、ロボット12の各軸の状態19に基づいてロボット12の動作状態が反映されたロボットモデル表現20を生成し、三次元画像生成手段21dは、三次元空間の指定された視点から見た対象物モデル表現18およびロボットモデル表現20を同一画面上に三次元的に表示させる。
(もっと読む)
ロボットなどの多関節システムの位置を較正する方法
本発明は多関節システム、特にロボットの位置を較正する方法に関する。
多関節システムは連接されたリンクにより相互連結されたN個のセグメントの連鎖からなり、この較正は連鎖の最後のセグメントにつながれた装置の測定位置Xmと、A1・A2...Ai......AN・XNの積に等しい計算された位置Xcとの差を最小にし、同次の変換行列Aiはi番目の各セグメントに関連し、この行列はシステムの構成パラメータ(q)の関数、及びセグメントの弾力性を特徴付ける所与の一般化されたパラメータ(p)の関数であり、この方法は:
−行列A1,A2...Ai......ANからなるシステムの弾力的なモデルを計算する第1ステップ(1)と、
−XmとXcの差を最小にする、一般化されたパラメータ(popt)の集合を得ることにより、弾力的なモデルを較正する第2ステップ(2)と、
−弾力的なモデルにおける同次の変換行列同士の間に、一般化された誤差行列Eiを導入することによる、弾力的なモデルの一般化された多項式較正のステップであって、計算された位置XcがA1・E1・A2・E2.........AN・EN・XNの積に等しく、一般化された誤差行列Eiがi番目の各セグメントと関連しており、1つのセグメントの各行列Eiがこのセグメントにつながれた構成パラメータ(q)の多項式関数である、第3ステップ(3)とを含む。
(もっと読む)
建設現場や、鉱山で使用する、片腕で扱える重量が1トン以上の5本指強力ロボットアーム。
【課題】重量を物取り扱う作業現場での、5本指を持つ人間の腕型ロボットを提供する。
【解決手段】以上の課題を解決するために、マスタースレーブ方式で制御する5本指強力ロボットアームを発明した。本発明を作業内容に適した任意の台座、又は台車に装着して活用する。この形態なら二足歩行時の重心が高くならないように、5本指強力ロボットアームを軽量化する必要性は高くない。5本指強力ロボットアームはアクティブサスペンション(脚)の技術をアーム部に使用したアクティブアクチュエーター(腕)を主たる動力源とする。アクティブサスペンションは、重さが50トン以上ある最新式の戦車の姿勢制御でも使用され始めており、十分な高出力と、耐久性がある。
(もっと読む)
タスクスキルによる丸型ハンドルバルブ操作装置
【課題】
位置誤差にロバストで様々なサイズの丸型ハンドルバルブを開放、閉鎖操作する人の器用さをロボットに実装するための丸型ハンドルバルブ操作タスクスキルを実装するタスクスキルによる丸型ハンドルバルブ操作装置を実現する。
【解決手段】
丸型ハンドルバルブ12の開放・閉鎖操作をタスクスキルに基づいて記述するために、タスクスキルの動作手順を示し、ここの動作手順をタスクスキルのモデルである初期条件、タスクスキル動作、終了条件に基づいて記述した。また、タスクスキル動作にはインピーダンスと力のハイブリッド制御を実装した。
(もっと読む)
遠隔操作装置および遠隔操作方法
【課題】 運動物体に関連する作業を映像に基づいて正確に遠隔操作することができる遠隔操作装置および遠隔操作方法を提供する。
【解決手段】 実作業空間100のカメラ13は作業アーム11を撮像し、その映像を映像信号として通信回線30を経由して仮想作業環境200の映像合成装置23に送信する。動画像生成装置24は合成映像の背景となる動画像を生成する。映像合成装置23は実作業空間100から送信された映像に動画像を合成する。広視野ディスプレイ25は映像合成装置23により得られる合成映像を表示する。操作者50は広視野ディスプレイ25に表示された合成映像を見ながらマスタアーム21を操作する。マスタアーム処理システム22は操作信号を実作業空間100の作業アーム制御システム12に送信する。作業アーム制御システム12はその操作信号に基づいて作業アーム11の動作を制御する。
(もっと読む)
遠隔操作装置
【課題】 スレーブハンドと作業対象物との距離を距離検出手段により検出し、前記距離に応じて遠隔操作の操作態様を変更することで、作業者への負担を軽減することができる遠隔操作装置を提供すること。
【解決手段】 操作者が操作するマスタハンド1の操作により、スレーブハンド11が油圧駆動される。スレーブハンド11と作業対象物Aとを撮像手段21a,21bにより撮像して両者の距離を演算する。演算された距離が所定値以上の場合においては、前記マスタハンド1の操作にかかわらず作業対象物Aに対してスレーブハンド11を近づける駆動動作を含む自動動作モードが選択され、前記距離が所定値未満である場合においては、前記マスタハンド1の操作に基づいてスレーブハンド11を駆動することができる手動動作モードが選択されるようになされる。
(もっと読む)
ロボットシステム
【課題】 ロボットシステムにおいて、計算機にかかる負荷を軽減し、また特定自由度への外乱の影響を協調的に調整することを可能とし、全体としての移動運動などパフォーマンスを安定維持することができるようにする可能とする。
【解決手段】 個々にアクチュエータを備えた複数の構造体からなり、各アクチュエータの自由度毎に対応して設けた複数の計算機を備える。各アクチュエータの計算機は通信ネットワークを介して結合し他のアクチュエータのセンサ情報を含む他の計算機の内部状態を取得する。各計算機には、各自由度の運動制御のため非線形振動子モデルを備え、前記非線形振動子モデルは他の計算機からの周期パターン入力に対して、自律的に振動周期を合わせ、また結合係数により決まる位相差を協調的に生成する。また全てのネットワーク結合されている計算機内で共有されたメモリを個々に備え、常に通信を介して更新する。
(もっと読む)
移動マニピュレータの遠隔操作装置
【課題】 移動体に搭載されたマニピュレータを遠隔地点から操作する際、移動体に設けたビデオカメラによりマニピュレータを撮影し、遠隔地の操縦者の側に設置したモニターに表示しマニピュレータを操作するものにおいて、モニター映像では移動体がスリップしたか物体が移動したかがわからないことがあった。
【解決手段】 例えば海底作業のため移動体1にマニピュレータ2とビデオカメラ3を搭載し、ビデオカメラ3の映像をモニター11に表示し、操縦者はこの画面を見ながらジョイスティック5を操作して、移動体操作信号7、マニピュレータ操作信号8、ビデオカメラ操作信号9を出力し作業を行う。移動体のスリップをスリップ量・方向検出部12で検出し、X−Yステージ駆動制御部13でジョイスティック5が搭載されたX−Yステージ14を同様に移動し、操縦者にスリップの状態を手首を通して体感させることができる。
(もっと読む)
1 - 15 / 15
[ Back to top ]