
Fターム[3C007BS27]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 複腕型マニピュレータ (334) | 人間型マニピュレータ (108)
Fターム[3C007BS27]に分類される特許
1 - 20 / 108
ロボットシステム及びロボットの異常検出方法
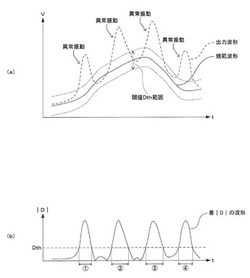
【課題】ロボットアームの異常の有無を検出可能とすることにより、ロボットの信頼性を向上する。
【解決手段】ロボットシステム1は、アーム103L,103Rを有するロボット100と、ロボットコントローラ150とを備えており、ロボット100は、アーム103L,103Rに設けられたセンサ122を有し、ロボットコントローラ150は、アーム103L,103Rが異常のない状態で所定の動作を行う間のセンサ122の出力値Vの時間履歴を規範データとして記録する規範データ記録部163と、稼働時においてアーム103L,103Rが所定の動作を行う間のセンサ122の出力値Vの時間履歴を出力データとして記録する出力データ記録部167と、規範データ記録部163に記録された規範データと出力データ記録部167に記録された出力データとを比較することにより、アーム103L,103Rの異常の有無を判定する比較判定部164とを有する。
(もっと読む)
ロボット

【課題】ロボットアームの機械部品の異常の有無を精度良く検出すること。
【解決手段】ロボット100は、アクチュエータAc2〜Ac15を有するアーム103L,103Rと、アーム103L,103Rの筐体の先端近傍に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ130と、センサ130の近傍に設けられ、センサ130の出力信号をデジタル信号に変換するA/D変換器とを有している。
(もっと読む)
ロボット
【課題】ロボットアームの異常の有無を検出可能とすることにより、ロボットの信頼性を向上する。
【解決手段】ロボット100は、アーム103L,103Rと、アーム103L,103Rに設けられ、アーム103L,103Rを駆動させるアクチュエータAc2〜Ac8と、アーム103L,103Rの内最も基端側に位置するアクチュエータAc2,Ac9の基部に設けられたセンサ固定治具121と、センサ固定治具121に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ122とを有する。
(もっと読む)
ロボットシステム及びロボットの状態判定方法
【課題】ロボットの機能性を向上する。
【解決手段】ロボットシステム1は、アーム103L,103Rを有するロボット100と、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ122と、センサ122の出力値Vに基づいて、ロボット100が常態であるか非常態であるかを判定する判定部164を備えたロボットコントローラ150とを有している。ロボットコントローラ150は、アーム103L,103Rが常態時に所定の動作を行う間のセンサ122の出力値Vの時間履歴を規範データとして記憶する規範データ記録部163を有し、判定部164は、稼働時において、アーム103L,103Rが所定の動作を行う際のセンサ122の出力値Vの出力データと、規範データ記録部163に記録された規範データとを比較することにより、ロボット100が常態であるか非常態であるかを判定する。
(もっと読む)
荷搬送アームおよび荷搬送アームを備えた荷搬送ロボット
【目的】複雑な制御を必要とせず荷物を傷つけずに保持できる荷搬送アームおよび荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体には、左右一対のアームを設け、アームの前腕21には、荷を当接支持する手先部30を軸35に回転可能に設けた。手先部30は、荷に当接する当接面30Aを有し、当接面30Aを前腕21の長手方向に垂直に付勢するねじりコイルバネ36の一端を固定し、ねじりコイルバネ36の他端は前腕21に固定されている。荷搬送ロボットは、荷の表面に当接面30Aを当接させるように前腕21を可動させ、荷の表面の向きに合わせて手先部30を軸35を中心に回転させる。当接面30A全体を荷の表面に当接させた状態で、前腕21を可動させ、手先部30を介して軸35にて荷の荷重を受けて、荷を移動させる。
(もっと読む)
ロボットシステム
【課題】自走式のロボットを適用して、被検者である人間に対して所定の処置を確実にかつ低コストで行うことができるロボットシステムを提供する。
【解決手段】移動可能なロボット100と、シート状に形成され、上面における被検者200の位置および姿勢を検出するシートセンサ10と、シートセンサ10に設けられ、シートセンサ10により検出された被検者200の位置および姿勢に関する情報、ならびに、シートセンサ10の位置および向きに関する情報を送信する第一,第二送信部23,32と、ロボット100に設けられ、第一,第二送信部23,32により送信される情報を受信する受信部111と、ロボット100に設けられ、受信部111により受信した情報に基づいて、ロボット100が被検者200に対する所定の処置を行うようにロボット100を制御するロボット制御部112を備える。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
シミュレーションシステムおよびそのためのシミュレーションプログラム
【課題】本発明は、作業ロボットが行う作業に求められる作業精度を満たす精度で、取得した画像データから作業対象物の3次元位置・姿勢認識を行い、作業ロボットが当該作業を適切に行うようシミュレーションすることが可能なシミュレーションシステムおよびそのためのシミュレーションプログラムの提供を目的とする。
【解決手段】本発明にかかるシミュレーションシステムは、撮像部20、特に第2撮像部22の倍率設定、フォーカス設定等の撮像パラメータを制御し、作業に要求される作業精度を満たす解像度で画像データを取得することにより、作業対象物10自体の大きさや、作業対象物10と撮像部20との距離に影響されて解像度が低下することを防ぎ、作業対象物10に対する必要な3次元位置・姿勢認識精度を維持することができるので、シミュレーションおよび現実の作業において作業効率の低下や、作業の失敗確率の増大を招くことを抑制できる。
(もっと読む)
干渉判定装置および干渉判定方法
【課題】干渉のない立体交差を考慮しつつも、干渉判定を短時間で行う。
【解決手段】
識別番号を割り当てる識別番号割当部421と、干渉情報を格納する干渉情報格納部412と、干渉条件情報を格納する干渉条件情報格納部413と、3次元空間を2次元平面上に投影し、2次元平面をn1×n2のマス目に区切るマス目管理部424と、障害物対応マス目を特定し障害物占有情報で初期化するメモリ領域初期化部425と、ロボット対応マス目を特定しロボット占有情報を記録する占有情報記録部426と、ロボット占有情報と干渉条件情報間の論理積を求め、論理積の全ての桁が「0」なら「干渉無し」と、少なくとも一つの桁が「1」なら「干渉有り」と判断する判断部427を備える。ロボット対応マス目のメモリ領域に障害物占有情報が記録されている場合に、障害物占有情報と識別番号間の論理和がロボット占有情報となる。
(もっと読む)
ハンド及びロボット
【課題】部品を把持するための腕(アーム)の姿勢変化を小さくすることが可能なハンド及びロボットを提供する。
【解決手段】ハンド35aは、1対の支持部42と、1対の支持部42の内側にそれぞれ支持され、部品を把持する1対の把持爪36と、1対の支持部42を各支持部42の長手方向と交差する揺動軸AXpに沿って開閉させる開閉機構400と、1対の把持爪36を揺動軸AXp回りに揺動させ、把持爪36の先端の向きを変更させる揺動機構500とを備える。
(もっと読む)
荷物移送用ロボットと該ロボットの制御方法
【課題】棚の上などにおいた荷物を所定位置に好適に押すことのできる荷物移送用ロボットを提供する。
【解決手段】荷物移送用ロボット1であって、車輪2dを有するベース2と、ベース2に対して傾動可能に設けられるボディ3と、ボディ3をベース2に対して傾動させる傾動装置8と、ボディ3に対して動作可能に設けられるアームと、アームをボディ3に対して動作させる動作装置10,11と、制御装置12を有する。制御装置12は、傾動装置8を制御してボディ3をベース2に対して傾動させてボディ3の傾動方向の反対側にスペース18を形成し、かつスペース18を形成した時に動作装置10,11を制御してスペース18にアームの一部または全部を移動させる制御モードを有する。
(もっと読む)
ロボット及びロボットの異常判定方法
【課題】距離センサに異常があるか否かを判定することができるロボット及びロボットの異常判定方法を提供すること。
【解決手段】本発明にかかるロボットは、距離センサ15と、距離センサ15と離れて設けられた距離検出ユニット21とを備える。ロボットはさらに、距離検出ユニット21の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第1の距離検出手段と、距離センサ15の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第2の距離検出手段と、第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とを比較する比較手段と、前記比較手段の比較の結果、前記第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とが異なる場合に、距離センサ15が異常であると判定する異常判定手段とを備える。
(もっと読む)
ロボット及びその制御方法
【課題】対象物を認識しながらアーム等を対象物まで近づけることができる新規なロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1は、頭部11、ロボット本体12、アーム13、カメラ14、物体認識部15、認識空間算出部16、軌道算出部17、可動制御部18を備える。カメラ14は、ロボット本体12の周囲の物体の環境情報を取得する。物体認識部15は、カメラ14が取得した環境情報に基づいて、ロボット本体12の周囲に存在する把持対象物90を認識する。認識空間算出部16は、物体認識部15により把持対象物90を認識するために必要とする空間としての認識空間20を算出する。軌道算出部17は、アーム13が、認識空間20への侵入を回避しつつ、把持対象物90に向かう軌道を算出する。可動制御部18は、アーム13の認識空間20への侵入を回避するように、アーム13の動きを制御する。
(もっと読む)
作業ロボット用エンドエフェクタ交換装置およびその一部を具える作業ロボット
【課題】取り扱う製品や部品の形状に合ったピッキング用ハンドや、ネジ締めドライバ、半田ごて等の作業ツールを素早く交換することが可能で、かつ位置決め用スタンド等の専用治具を必要としない作業ロボット用エンドエフェクタ交換装置を提供することにある。
【解決手段】各々識別標識を持つ複数のエンドエフェクタと、前記エンドエフェクタを任意の場所に保持するエンドエフェクタ置場と、前記エンドエフェクタ置場に保持された前記エンドエフェクタの前記識別標識を撮像する撮像手段と、前記撮像手段が撮像した前記エンドエフェクタの前記識別標識の画像に基づき前記エンドエフェクタの3次元位置を算出するエンドエフェクタ位置算出手段と、前記算出したエンドエフェクタの3次元位置を作業ロボットの作動制御装置に教示するエンドエフェクタ位置教示手段と、を具えてなる作業ロボット用エンドエフェクタ交換装置である。
(もっと読む)
エンジェロイドゼロ(ANGELOIDZERO)
【課題】宇宙で生体が生存競争するためのマーシャルアート(martial art)のメカニズムを有していて、背中にメカニカルもしくは人工的な両翼と両腕を有する人型のロボットが今までなかった。
【解決手段】人型のロボットに宇宙で生体が生存競争するためのマーシャルアートのメカニズムと、人型のロボットの背中にメカニカルもしくは人工的な両翼と両腕をそなわせる。
(もっと読む)
サービス提供システム及びサービス提供方法
【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
撮像面位置検出装置およびそれを具える作業ロボット
【課題】対象物の撮像面の位置を簡易かつ安価に、しかも短時間で検出する装置を提供することにある。
【解決手段】レーザ光軸が互いに交差するように配置された少なくとも3台のレーザ光照射手段と、前記少なくとも3台のレーザ光照射手段に対する所定位置で、それらのレーザ光照射手段からレーザビームを照射された対象物の表面を撮像する1台の単眼の撮像手段と、前記撮像手段が前記対象物の撮像面を撮像した1枚の画像での前記レーザビームの少なくとも3つの照射点の位置と前記撮像手段の撮像光軸との位置関係から幾何学的演算により前記撮像手段に対する前記対象物の撮像面の距離と向きとを求めて出力する演算手段と、を具えてなる、撮像面位置検出装置である。
(もっと読む)
ロボット装置及び加工システム並びに加工品の製造方法
【課題】対象物への供給材の取り付け作業を自動で行なうことができるようにした、ロボット装置及び加工システム並びに加工品の製造方法を提供する。
【解決手段】胴部と、胴部に設置され複数の関節部を有する第1アームと、第1のアームと別体に胴部に設置され複数の関節部を有する第2アームと、第1アーム及び第2アームにそれぞれ設けられたハンド部と、を有するロボットにより複数種類のワーク部品のいずれかの種類のワーク部品については第1アーム及び第2アームのハンド部で同時に保持し、残る種類のワーク部品については第1アーム又は第2アームのハンド部で保持搬送する。
(もっと読む)
ロボット、状態呈示装置及び状態呈示方法並びにロボットの教示方法
【課題】ロボットに動作を教示する際に、ロボットアームの駆動部の可動残量を容易に確認することができるロボット、状態呈示装置及び状態呈示方法並びにロボットの教示方法を提供する。
【解決手段】可動範囲が予め設定された駆動部11〜17を備えるロボットアーム18、18aに装着され、作業対象物19に対して作業を行う作業ツール20、20aと、作業ツール20、20aに近接して配置され、可動範囲に対する駆動部11〜17の可動残量を表示する状態呈示装置21と、作業ツール20、20aに対する作業対象物19の位置を検知する位置検出手段25と、駆動部11〜17の可動範囲内で、駆動部11〜17を駆動してロボットアーム18、18aの動作を制御するアーム制御部27とを有し、アーム制御部27は、作業ツール20、20aが作業対象物19に作業を行える位置及び姿勢となったロボットアーム18、18aの姿勢を記憶する。
(もっと読む)
1 - 20 / 108
[ Back to top ]