
Fターム[3C007CU01]の内容
マニピュレータ、ロボット (46,145) | 腕 (311) | 腕を形成する素材 (33)
Fターム[3C007CU01]に分類される特許
1 - 20 / 33
パイプ成形体
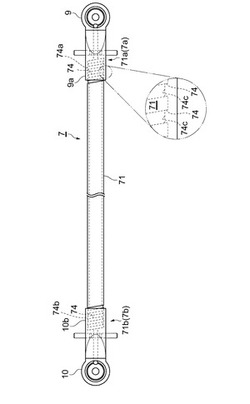
【課題】剛性を確保しつつ連結部材との接合を強化可能なパイプ成形体を提供する。
【解決手段】
パイプ成形体であるロワーアーム7は、炭素繊維強化プラスチックにより円管状に形成された外側層71を備えているので、金属製のものに比べて高い剛性が確保される。さらに、ロワーアーム7においては、外側層71の一端71aを含む一端部に、雄ねじ74aが設けられている。このため、ロワーアーム7と連結部材9との接合に際して、接着剤での接着に加え、雄ねじ74aと雌ねじ9aとの螺合を用いることが可能となる。したがって、ロワーアーム7によれば、連結部材9との接合を強化することが可能となる。
(もっと読む)
ロボット

【課題】
適切な性能を維持しながらも、より省コストに提供できるようにしたロボットを得ることを目的とする。
【解決手段】
基台と、第1軸まわりに回転可能に基台に連結される第1構造体と、第1軸に対して直交する第2軸まわりに回転可能に第1構造体に連結される第2構造体と、第2軸と平行な第3軸まわりに回転可能に第2構造体に連結される第3構造体と、を少なくとも有するロボットであって、第1構造体と第3構造体とは、同形状の鋳物材を用いて形成される。
(もっと読む)
パイプ成形体
【課題】ロボットアームの剛性の確保及び振動減衰特性の向上を図ることを可能とするパイプ成形体を提供する。
【解決手段】
パイプ成形体であるロワーアーム7は、CFRPにより円管状に形成された外側層71と内側層72とを備えているので、剛性が確保される。さらに、ロワーアーム7は、外側層71と内側層72との間に配置された制振層73を備えているので、振動減衰特性が向上される。よって、ロワーアーム7を用いたロボットアーム3においては、剛性が確保されると共に振動減衰特性が向上される。
(もっと読む)
部品実装装置及び部品実装装置の製造方法
【課題】軽量化を図るとともに、Xビームとレールとの間で発生する反りを抑制することができるXビームを備える部品実装装置を提供する。
【解決手段】レール102とXビーム103とYビーム104とを備える部品実装装置100であって、Xビーム103は、マグネシウムを主成分とする材料からなる本体部103aと、本体部103aとは異なる材料からなり、本体部103aとレール102とを接続する接続部103b、103eであって、Xビーム103のY軸方向の一端部に本体部103aに固定されて配置される接続部103b、103eとを有し、部品実装装置100は、さらに、本体部103aの熱膨張とレール102の熱膨張との差によって発生するXビーム103の反りに抗する補強部材105であって、炭素繊維強化樹脂またはアラミド繊維強化樹脂からなり、Xビーム103のY軸方向の他端部に取り付けられる補強部材105を備える。
(もっと読む)
部品実装装置及び部品実装装置の製造方法
【課題】軽量化を図るとともに、ヘッドを精度良く位置決めすることができるXビームを備える部品実装装置を提供する。
【解決手段】ヘッド101をX軸方向に摺動自在に案内するX軸方向に延びて配置されるレール102と、レール102がY軸方向の一端部に取り付けられX軸方向に延びて配置される棒形状のXビーム103と、Xビーム103をY軸方向に摺動自在に案内するY軸方向に延びて配置されるYビーム104とを備える部品実装装置100であって、Xビーム103は、炭素繊維強化樹脂からなる本体部103aと、本体部103aとレール102とを接続する接続部103b、103eであって、Xビーム103のY軸方向の一端部に本体部103aに固定されて配置される金属製の接続部103b、103eとを有する。
(もっと読む)
ロボット及びその製造方法
【課題】樹脂で形成された加工精度の高い軽量なロボットアームを備えたロボットを提供する。
【解決手段】第1アーム10に連結された第1アクチュエータ20と、第1アクチュエータ20を収容する第1収容部105を有する関節フレーム100を備え、第1収容部105は、樹脂Aの硬化物により形成された基礎フレーム101と、樹脂Aの硬化物よりも高い融解温度を有する樹脂Bの硬化物により形成された第1フレーム102とを接合して構成され、第1アクチュエータ20は、第1フレーム102に固定される。
(もっと読む)
ロボットアームおよびその修復方法
【課題】 人と協調して作業するロボットアームで、安全確保した上で、ロボットアームを小型化できるようにする。
【解決手段】 熱可塑性樹脂マトリックス部による硬質なロボットアーム表層部に検知対象物が近接することを出力電圧変化として検出し、この出力電圧のレベルによってロボットアーム表層部を加熱軟化させ、検知対象物と接触した際の安全を確保する。
(もっと読む)
ロボットハンド
【課題】 曲げ剛性を確保しつつ制振性を向上させることができるロボットハンドを提供する。
【解決手段】 ロボットハンド1は、互いに積層されたCFRP層2,3と、CFRP層2とCFRP層3との間に配置された制振弾性層4と、を備えている。制振弾性層4は、粘弾性樹脂と粘弾性樹脂に混練された繊維状物質とを含む材料からなる粘弾性樹脂領域41を有する。繊維状物質は、粘弾性樹脂の剛性よりも高い剛性を有する。このロボットハンド1によれば、CFRP層2とCFRP層3との間に、剛性が比較的高い繊維状物質が混練された粘弾性樹脂を含む材料からなる粘弾性樹脂領域41を有する制振弾性層4が配置されているので、曲げ剛性を確保しつつ制振性を向上させることができる。
(もっと読む)
ロボットハンド
【課題】 曲げ剛性を確保しつつ制振性を向上させることができるロボットハンドを提供する。
【解決手段】 ロボットに組み込まれる際に保持される保持予定部Bを有するロボットハンド1は、互いに積層されたCFRP層2,3とCFRP層2とCFRP層3との間に配置された制振弾性層4とを備える。制振弾性層4は、粘弾性樹脂からなる粘弾性樹脂領域41と高剛性樹脂からなる高剛性樹脂領域42とを有する。粘弾性樹脂領域41と高剛性樹脂領域42とは、保持予定部Bにおいて、CFRP層2の長手方向に交差する方向に沿って交互に配列されている。ロボットハンド1においては、粘弾性樹脂領域41により制振性が向上される。また、保持予定部Bにおいて、粘弾性樹脂領域41と高剛性樹脂領域42とが、CFRP層2の長手方向に交差する方向に沿って交互に配列されているので、CFRP層2の長手方向に交差する方向に沿っての曲げ剛性が確保される。
(もっと読む)
管状連結体及びその製造方法
【課題】繊維強化合成樹脂製管状部材の端部と被連結部材とが強固に連結された管状連結体と、その製造方法を提供する。
【解決手段】CFRP製の管状部材2の両端に被連結部材としての継手3が固着されている。管状部材2の両端にそれぞれ内挿部材4が挿入(内挿)され、内挿部材4の外周面と管状部材2の内周面2iとが接着剤により接着されている。管状部材2の外周面2fが穴の内周面すなわち円環状部3bの内周面3iに接着剤によって接着されると共に、内挿部材4の先端面4eが穴の奥底面よりなる対峙面3eに接着剤によって接着されている。
(もっと読む)
基板搬送用ロボットアームのフォーク構造
【課題】基板搬送用ロボットのハンド部のフォークに対して要求される耐熱性要求、剛性要求、軽量化要求を満たすと共に、長尺化要求をも満たすフォーク構造を提供する。
【解決手段】基板に薄膜処理を施す際に使用する基板を搬送するロボットのハンド部に使用されるフォーク構造において、幅方向に複数枚の板状部材11,12,13を連ね、当該連ねられた複数枚の板状部材を長手方向に複数段継ないだ梁状構造物をなし、当該連ねられた複数枚の板状部材を長手方向に継ぐ位置において、基端側の複数枚の板状部材と先端側の複数枚の板状部材が互い違いに重なり合っており、当該複数の板状部材が互い違いに重なり合っている部位の少なくとも2箇所において、複数個のボルト・ナット51a等による機械的な締結部品や凹凸面の嵌合によるせん断荷重伝達手段51を設けた構成のフォーク構造とした。
(もっと読む)
樹脂複合材及びこれを用いた梁構造部材
【課題】炭素繊維強化プラスチック(CFRP)を主材とする樹脂複合材に関し、制振性、強度に優れ、毒性や環境への負荷が小さい樹脂複合材を提供する。
【解決手段】炭素繊維強化プラスチック内部に、樹脂フィルムを封じてなる構成を備えた樹脂複合材であって、前記樹脂フィルムが、引っ張り弾性E’が1×107Pa〜5×108Paで、且つ損失正接tanδが5×10−2〜1×100であることを特徴とする樹脂複合材を提案する。
(もっと読む)
リンク構造体
【課題】軽量かつ高剛性で量産が可能な繊維強化プラスチックに適した形状を有するリンク構造体を提供することを目的とする。
【解決手段】腕部の少なくとも一端に関節部を有する繊維強化プラスチック成形体から構成されるリンク構造体において、腕部は関節部に設けられた回転中心軸に垂直な平面と対向する面Aおよび前記回転中心軸に平行な平面と対向する面Bを有してなり、関節部は前記面Aおよび面Bの一部を延在した面から構成され、かつ繊維強化プラスチック成形体の内側に、複数の節状取付部が設けられているリンク構造体。
(もっと読む)
真空搬送装置の製造方法及び真空搬送装置
【課題】アームの軽量化を図りつつ、製造工程を簡略化することができる真空搬送装置の製造方法及び真空搬送装置を提供する。
【解決手段】搬送ロボットの製造方法において、アーム本体20を構成する上側板25、下側板26及び環状部材27と、関節軸を支持する各ブシュ21〜23とから中空構造のアーム5を組み立て、上側板25、下側板26及び環状部材27を互いに接合する接合部と、それらの部材と各ブシュ21〜23の接合部とにロウ材を付着させる工程と、組み立てられたアーム5を真空加熱して、ロウ付けする工程とを有する。
(もっと読む)
ロボットアームおよびそのロボットアームを供えたロボット
【課題】本発明の目的は、外部応力の効果的な緩和と薄い外皮構造との双方を実現できるロボットアームを提供することである。
【解決手段】本発明は、外骨格フレームと、前記外骨格フレーム上を被覆し、その内部に複数の空孔が形成された柔軟性の外皮とを備え、前記空孔は、前記外皮の厚み方向と平行な方向に延在する第1の幅が前記外皮の厚み方向と垂直な方向に延在する第2の幅より大きいロボットアームである。
(もっと読む)
ロボットのアーム用構造材及びその製造方法並びにロボット
【課題】十分な強度及び放熱性を有しながらも、従来よりも軽量化できるようにしたロボットのフレーム及びロボットを提供する。
【解決手段】アームの内部に発熱源を収納するロボットのアーム用構造材であって、マトリックス樹脂と強化用繊維とからなる繊維強化プラスチックの繊維方向が異なるように積層された骨格層4と、骨格層4の表面に形成され、アームの内部側とアームの外部側とで繊維強化プラスチックの繊維方向が連続するように成形された放熱層5と、を有して構成する。
(もっと読む)
産業用多関節ロボットの安全性評価方法
【課題】産業用多関節ロボットのロボットアームの表皮部材の材料種毎の安全性を的確に評価することができる産業用多関節ロボットの安全性評価方法を提供する。
【解決手段】自重により傾動落下するロボットアームを模擬する模擬落下装置を用い、先ず、衝撃付与工程により、試験用表皮部材11を取り付けた落下手段10を落下させて被衝突体14に衝撃を付与する。次いで、測定工程により、材料種の異なる試験用表皮部材11毎に衝撃荷重を測定する。次いで、評価用データ生成工程により、表皮部材の材料種毎に予め採取された人体骨折相当の衝撃荷重と接触面積との関係を示すデータと、測定工程により測定した試験用表皮部材の衝撃荷重に基づいて、表皮部材の材料種毎の評価用データを生成する。
(もっと読む)
加工前リンク構造体の固定方法、およびそれを用いたリンク構造体の製造方法、リンク構造体
【課題】加工前リンク構造体において、高精度に加工することが可能な固定方法、およびそれを用いたリンク構造体の製造方法、リンク構造体を提供することにある。
【解決手段】腕部と、該腕部の両端に設けられた関節部であって、該両端の少なくとも一端に、二股に分かれたヨークが形成された関節部とを有してなる、繊維強化プラスチックで構成された加工前リンク構造体を、該加工前リンク構造体に加工を施すために用いられる加工治具に固定するにあたり、前記両端の関節部に部分的に製品外フランジを設け、該製品外フランジを前記加工冶具に接着させることにより、前記加工前リンク構造体を前記加工治具に固定すること。
(もっと読む)
繊維強化プラスチック製リンク構造体の関節構造
【課題】軽量かつ高剛性であり、大きいトルク伝達が可能なFRP製リンク構造体の関節構造を提供すること。
【解決手段】腕部の少なくとも一端に関節部を有する繊維強化プラスチックから構成されるリンク構造体において、腕部は関節部に設けられた回転中心軸に平行な平面と対向する面Aおよび前記回転中心軸に垂直な平面と対向する面Bを有してなり、関節部は前記回転中心軸に垂直な平面と対向する面Cおよび前記面Cと角度をもって立ち上がるフランジ面Dを有してなり、前記フランジ面Dは前記回転中心軸を中心とする円筒面Eと前記円筒面Eと交差する面Fを有しており、金属取付座をとりつけることができる空間が、前記面C、面Eおよび面Fに囲まれた部分に形成されていること。
(もっと読む)
繊維強化プラスチック製リンク構造体
【課題】軽量かつ高剛性な繊維強化プラスチックに適した形状を有するリンク構造体を提供すること
【解決手段】腕部の少なくとも一端に関節部を有する繊維強化プラスチックから構成されるリンク構造体において、腕部は関節部に設けられた回転中心軸に平行な平面と対向する面Aおよび回転中心軸に垂直な平面と対向する面Bを有してなり、関節部は回転中心軸に垂直な平面と対向する面Cおよび面Cと角度をもって立ち上がるフランジ面Dを有してなり、少なくとも面Aと面Dとを、または、面Bと面Cとが1つの稜線で接続していること。
(もっと読む)
1 - 20 / 33
[ Back to top ]