
Fターム[3C007CY21]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | 負荷平衡機構 (88)
Fターム[3C007CY21]の下位に属するFターム
釣り合いおもりを設けるもの (17)
バネによるもの (36)
流体圧によるもの (19)
Fターム[3C007CY21]に分類される特許
1 - 16 / 16
ワーク搬出入装置及び乾燥処理装置
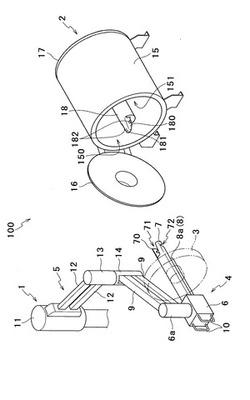
【課題】ワークの搬出入を容易に行うことのできるワーク搬出入装置及び乾燥処理装置を提供する。
【解決手段】操作部4と、荷重バランサー装置5と、を有し、操作部4は、エアレギュレータが搭載された箱体状の操作本体6と、操作本体6の前面側に設けられた長尺な棒状のアーム部材7と、固定機構8と、一対の把持部材10とを有している。アーム部材7は、ワーク3の内周面に挿入されることで、ワーク3を保持可能であって、その保持されたワーク3を軸方向に沿ってスライド可能に構成されている。
(もっと読む)
移送ロボット

【課題】本発明は、2組のリンク機構から構成された、昇降機構において、リンクへの負荷を軽減する機構を提供する。
【解決手段】搬送物を載置するハンド部と、前記ハンド部と連結され少なくとも2つ以上の回転関節を備え前記ハンド部を一方向に移動するように伸縮し旋回軸方向に対向するように配置された2組の水平アームからなる水平アーム機構30と、前記水平アーム機構30の支持ベース8に連結され水平アーム機構30を昇降する少なくとも2組のリンク機構から構成される昇降機構20と、から構成され、前記支持ベース8と前記昇降機構20の第3関節部8bとの間には水平アーム機構30をX方向に移動自在に支持する直動機構が配置されたものである。
(もっと読む)
産業用ロボット
【課題】産業用ロボットの手首において、常に最適なバランス力に保つことで減速機の小型化が可能な構造を提供すること。
【解決手段】リストユニットを備えた産業用ロボットにおいて、フランジ14に回転自在に備えられたリング15とリストベース10間にバランサ16を備えたものである。前記リストユニットは、アーム先端に備えられ、第1の減速機と、前記第1の減速機に直交するように配置された第2の減速機と、前記第1の減速機と同軸で回転する第3の減速機を備え、前記第1の減速機に備えられたリストベースと前記第3の減速機に備えられたフランジを両端として配置されたバランサから構成される。
(もっと読む)
搬送システム,ロボット装置及び搬送方法
【課題】小型のロボットを用いながらも相対的に大重量のワークの搬送を自動化できるようにした、搬送システム,ロボット装置及び搬送方法を提供する。
【解決手段】ワークWを懸垂して支持するクレーンユニット102を水平方向に移動可能とするクレーン移動機構103と、ワークWを支持したクレーンユニットを保持して移動させるマニピュレータユニット101と、を有し、第1位置にあるワークWをクレーンユニットにより支持させ、ワークWを支持したクレーンユニット102を第2位置側に移動させて、支持したワークWを第2位置に載置する。
(もっと読む)
多自由度マニピュレータおよび多自由度マニピュレータの制御プログラム
【課題】マニピュレータ先端部に保持されるワークの質量の変動に影響されることなく、多自由度マニピュレータの滑らかで高精度な動作を実現する。
【解決手段】複数のリンク17a、リンク18a、可動アーム11bを、複数の第1関節モータ17、第2関節モータ18、第3関節モータ19によって駆動することにより、ワーク10を保持するマニピュレータ先端部11aの3次元空間での大きな自由度の動きを実現する多自由度マニピュレータ11において、マニピュレータ先端部11aの内部に流体タンク21を設け、ワーク10の質量の変動に応じて流体タンク21に貯留される流体20の量を変化させることで、ワーク10の質量の変動に影響されることなく、常に一定の負荷がマニピュレータ先端部11aに作用するようにした。
(もっと読む)
部品位置決め方法および部品位置決め用治具
【課題】所定の位置に対する部品の位置決めについて、装置構成の大型化や複雑化を招くことなく、十分な部品位置保持力および部品位置精度を得ることができる部品位置決め方法を提供する。
【解決手段】所定の位置に対する位置決め対象である部品(ワーク1)を、ロボット10に支持された状態で所定の範囲内で移動可能に設けられる移動治具(部品基準治具20)に固定した状態で支持し、部品基準治具20を移動させることにより、ワーク1の位置決めを行う部品位置決め方法であって、前記所定の位置に対して固定された状態で設けられる固定治具(サポート治具30)を用い、部品基準治具20およびサポート治具30のそれぞれに、互いに嵌合した状態で部品基準治具20をサポート治具30に対して所定の精度で位置決めする嵌合部(位置決めピン25、位置決め穴部35)を設け、これら嵌合部同士が嵌合した状態で、ワーク1の位置決めを行う。
(もっと読む)
マニピュレータ
【課題】3次元空間的上で広い可動範囲に亘ってリンクの関節点におけるモーメントを補償する補償機構を容易に実現することができるマニピュレータを提供する。
【解決手段】ベースリンク3と、ベースリンク3の一端に第1の回転軸を有する第1の関節点S1を介して他端が接続された中継リンク4と、中継リンク4の長手方向に平行な第2の回転軸を有する第2の関節点S2を介して中継リンク4の一端に接続された2自由度平行リンク構造からなる第1乃至第4のアームリンク6,7,8,9を有するアーム部5とを備え、第1の関節点S1における第1の回転軸及び第2の関節点S2における第2の回転軸回りの、第1のアームリンク6と第2のアームリンク7と第4のアームリンク9のモーメントの釣り合いが取れている。
(もっと読む)
ロボットアーム
【課題】小型の回転関節を備えていても高加速トルクを供給することができること。
【解決手段】駆動側リンク4cと従動側リンク4dとが従動側リンクを駆動側リンクに対して回転駆動させるトルクを供給する回転関節5cを介して連結されたリンク機構を有する装置であって、駆動側リンクに、回転関節の前記トルクのうちの加速トルクを補助するための加速補助トルクを供給する加速補助トルク供給機構7を備えることを特徴とするロボットアームを提供する。
(もっと読む)
産業用ロボットおよび動作方法
【課題】アームバランス装置が小型化でき、操作性の良い産業用ロボットを提供すること。
【解決手段】ベース3に支持され、前後に傾動して作業を行う下部ア−ム4を備え、前記下部アーム4の傾動負荷を補助するバランサ8を備えた産業用ロボット1において、前記バランサ8が電動機により駆動されたものである。
(もっと読む)
産業用ロボット
【課題】多関節型の産業用ロボットであって、各関節の姿勢が時々刻々変化したり、負荷の質量が都度変化したりする形態のものにおいても、バランス力を良好に発生させることが可能なバランス機構を有する産業用ロボットを提供する。
【解決手段】一端が基台部1に回転可能に軸支されたアーム3と、一端が基台部1に連結されるとともに、他端がアーム3に連結されたバランス機構4と、を有し、このバランス機構4は減速機構41とサーボモータ42とからなる駆動機構を有するようにした。これにより、アーム3に作用する重力モーメントとバランスする力を、都度、バランス機構4のサーボモータ42に付与することにより、常に適正なバランス力を付与することができる。
(もっと読む)
ロボットシステム
【課題】 軽量簡便なシステムで、静止状態または動作中にかかわらず安定な姿勢が保たれるロボットシステムを提供する。
【解決手段】 複数の体節3と、前記体節同士をつなぐ関節4と、前記関節を駆動する駆動装置5と、前記駆動装置を制御する制御装置8と、前記体節、関節、駆動装置または制御装置のうち少なくとも一つに設けられ、外界より比重の軽い流体が注入された浮嚢2を有し、浮心と重心が異なり、外界に対する比重が1以上であることを特徴とするロボットシステム。
(もっと読む)
走行型ロボット装置及びその制御方法
【課題】比較的重量物であるワークに対してもアームを肥大化させることなくコンパクト化を図ることができ、ワークの積み降ろしにかかるサイクルタイムを短縮することができる走行型ロボット装置及びその制御方法を提供すること。
【解決手段】複数のリンク機構(第一リンク機構11・第二リンク機構12)により水平方向に旋回可能及び伸縮可能に構成されるアーム7と、アーム7の先端部に設けられワークを支持するフォーク9(ワーク支持体)を支持するとともに昇降及び旋回させるロボットアーム20(昇降旋回手段)とを有するロボット6を、走行台5上に備える走行型ロボット装置1であって、フォーク9と連結され、該フォーク9の、ロボットアーム20による昇降動作、旋回動作及びアーム7の伸縮による水平方向の移動動作をアシストするアシスト手段30を設けた。
(もっと読む)
作業補助装置
【課題】対象物を小さな操作力で移動させることができ、かつ対象物が設定された許容範囲を外れた場合でも安定して対象物を許容範囲内へ戻すことができる作業補助装置を提供する。
【解決手段】作業補助装置10は、対象物30を取り付ける多関節アーム11を備える。モータ36が発生するトルクがワイヤ32を介してリンク12aを鉛直上方に引っ張ることで重力によって多関節アーム11が鉛直方向に揺動することを抑制する。各関節14はリンク12が揺動する際の抵抗力を調整可能に付与する抵抗力付与機構16を備える。コントローラ22は対象物が許容範囲50内のときは抵抗力付与機構16が各関節に付与する抵抗力を小さくする。対象物が許容範囲50外のときは抵抗力を大きくする。抵抗力は多関節アーム11の動かし難さを調整するので各関節に付与する抵抗力を大きくしても対象物が操作力の方向とは反対の方向に移動することを防止できる。
(もっと読む)
荷重取扱装置におけるアーム自重のバランス方法とその機構
【課題】 仮想定比槓杆タイプのアーム機構を備えた荷重取扱装置における上記のようなアーム流れ現象を生じさせないアーム機構の新たなバランス方法とそのための機構を提供すること。
【解決手段】 複数のアーム1〜7がリンク結合された仮想定比槓杆タイプのアーム機構Amであって、その姿勢を変化させることができるアーム機構Amのアーム先端側に支持させた負荷Wを、そのアーム機構Amの後端側に伝達される昇降駆動力13によって昇降させるとき、そのアーム機構自体の自重を、前記昇降駆動力13とは別に設けた駆動力24によって支持することにより、当該アーム機構自重と前記の別の駆動力24とを平衡させること。
(もっと読む)
搬送ロボット
【課題】 可搬質量が大きくかつ小型化が可能な搬送ロボットを提供することである。
【解決手段】 一端部33aが基台32に連結され、基台32に対して変位可能に設けられる第1アーム33と、基台32に対して第1アーム33を変位駆動するアーム駆動手段35と、第1アーム33の他端部33bが基台32に対して水平方向に離反した状態で第1アーム33を下方から支持するアーム支持手段39と、第1アーム33に連結され、被搬送物31を保持する保持手段38とを含む。アーム支持手段39を用いることによって、小さい駆動力を出力するアーム駆動手段35および小さい剛性を有する第1アーム33を用いて、被搬送物31を基台32に対して水平方向に離反した位置に搬送することができる。このように小さい駆動力のアーム駆動手段35および小さい剛性の第1アーム33を用いることで、可搬質量を大きくすることができるとともに小型化することができる。
(もっと読む)
多関節ロボット
【課題】 多関節ロボットの、ツールや被搬送物の移動距離の増大を図りつつ小型化を促進する。
【解決手段】 多関節アーム54を構成する複数のアームのうち、アーム40の、それよりも多関節アーム54の先端寄りに配置されたアーム44から受けるトルクの力点である関節部42を、支持台60によって所定位置で停止させる。そして、アーム40よりも多関節アーム54の先端寄りに配置されたアーム44、48,52のみを作動させる。アーム40よりも多関節アーム54の基端寄りに配置されたアーム30に対し、アーム40が受けるトルクが作用することがなくなり、アーム30の負荷が軽減される。従って、アーム40よりも多関節アーム54の基端寄りに配置された関節部31、38の、各駆動要素の小型化を図ることができる。
(もっと読む)
1 - 16 / 16
[ Back to top ]