
Fターム[3C007ES19]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 刺し通し保持するもの (13)
Fターム[3C007ES19]に分類される特許
1 - 13 / 13
部品組み付け装置及び機械部品の製造方法
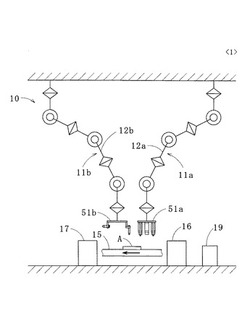
【課題】エア源を使用することなく、部品を組み付けることが可能な部品組み付け装置及び機械部品の製造方法を提供する。
【解決手段】第1のアーム12aの先端部に第1のハンド51aを有し、第1のハンド51aを用いて第1の部品を保持する第1のロボット11aと、第2のアーム12bの先端部に第2のハンド51bを有し、第2のハンド51bを用いて第1の部品に組み付けられる第2の部品を保持する第2のロボット11bと、を備え、第1のハンド51bは、第1の部品又は第2の部品を上方から押さえる押さえ部材74を有し、第2のハンド51bは、第2の部品に形成された孔に挿入され、第2の部品を保持する支持ピン55、56を有する。
(もっと読む)
ワーク搬送装置およびこれを使用したワーク搬送方法

【課題】荷崩れして絡み合った状態のクランクシャフト等のワークを作業者の手を借りることなく自動で取り出し搬送できる。
【解決手段】ロボットアームの先端部11に搬送治具2が設けられ、搬送治具2は中央がアーム先端部11に支持され、その一端に三次元位置認識用のカメラ42を、他端には搬送されるクランクシャフトWのシャフト部W1に嵌装される筒状の保持具3を備えている。カメラ42の画像からシャフト部W1の姿勢と位置を特定し、保持具3内にシャフト部W1を相対的にを進入させた後、保持具3を開口が上方に位置するような姿勢にしてクランクシャフトW1を持ち上げて搬送する。
(もっと読む)
取り寄せ具
【課題】遠方の物品を俊敏にキャッチし取り寄せる、長尺になる取り寄せ具を提供する。
【解決手段】ハンド保持具1にレール収納体3が設けられ、該レール収納体3にはこれから前方に繰り出される伸縮レール4が設けられ、該伸縮レール4に、とってこいスライダー5が設けられ、該とってこいスライダー5に吊下連結材6を介してキャッチ7が設けられている。また後方のスライダーにはスプーン形状のキャッチが設けられている。さらに先端具42付近に、先端つまみ具片44が設けられ、キャッチした物品を手元に移動しうる構成とする。
(もっと読む)
搬送装置
【課題】中空領域を有する被搬送物を安定して保持できる簡易な構造の搬送装置を提供すること。
【解決手段】搬送装置1は、被搬送物(巻取りコア608)の中空領域Sを保持する保持領域112を有し、保持領域112を含み、スリット状の切り欠き部114が形成されることにより、先端部111が複数に分割される保持部材10と、保持部材10を挿入して保持領域112を突出させる挿入孔32を有し、保持部材10を移動可能に支持する支持部材30と、を有して構成され、保持部材10は、中空領域Sに挿入した保持領域112が中空領域Sを形成する内側形状6085の部位に当接して撓むことで巻取りコア608を保持し、また、保持部材10は、支持部材30の挿入孔32に保持領域112を移動することにより、保持領域112を更に撓ませることで内側形状6085の部位への当接を解除して巻取りコア608を放す。
(もっと読む)
汎用ハンドリング治具
【課題】シンプルな構造の汎用ハンドリング治具を提供する
【解決手段】駆動源によりY方向にスライド伸縮可能な第1サーボ軸11と、駆動源によりZ方向に進退可能な第2サーボ軸12と、第2サーボ軸12を第1サーボ11に連結する解除可能な従動装置13と、Y方向の任意の位置において第2サーボ軸12を固定するためのロック装置14と、第1サーボ軸11に設けられてY,Z方向の双方と垂直をなすように突出形成される第1,第2クランプピンCL1,CL2と、第2サーボ軸12に設けられてY,Z方向の双方と垂直をなすように突出形成される第3クランプピンCL3とを有しており、第2,第3クランプピンCL2,CL3には、ワークのロケート穴に当接して剛性反力を受けた第2,第3クランプピンCL2,CL3が当該剛性反力に従って移動することを許容するロック可能な第1,第2倣い装置がそれぞれ設けられていることを特徴とするハンドリング治具。
(もっと読む)
ワークハンド装置およびワークハンド装置の段取りに使用する段取り台、その段取り方法ならびにワークハンド装置を使用したワーク搬送方法
【課題】特定ワークの専用品とせず、汎用性の高いワークハンド装置を提供する。
【解決手段】ロボット20のアーム21の先端に接続され、アーム21の旋回、伸縮によ
ってワークWを搬送するワークハンド装置1″であり、フレーム2にワークWを位置決めする基準ピン3a,4a,5aと、この基準ピンに内蔵され、ワークWを把持するクランパー3b,4b,5bと、それぞれの基準ピンとクランパー3b,4b,5bを有するそれぞれの第1、第2、第3ピンクランパーユニット3,4,5とを備え、第1ピンクランパーユニット3をX軸方向の位置を固定する第1固定手段9と、第2、第3ピンクランパーユニット4,5をY軸方向へ移動する第2駆動手段7と、第2、第3ピンクランパーユニット4,5をZ軸方向の位置を固定する第2、3固定手段11,12と、Z軸の先端方向へ付勢する第2、3付勢手段11c,12cとを備えたワークハンド装置1″である。
(もっと読む)
マテリアルハンド
【課題】パネル材のワークのクランプ不良及びワークの離脱不良を解消したマテリアルハンドをを提供する。
【解決手段】シリンダ1の下端に同軸芯で突設されたボス2と、ボス2の先端面より突出したピン3と、ピン3の側部に起倒可能に設けられシリンダ1のピストンロッドの進退作動により起倒するクランプ爪3aとを備え、ピン3がワークWに開けられている穴に挿入しクランプ爪3aとボス2の先端面とでワークをクランプして運搬するマテリアルハンドにおいて、ボス2の外周にボス2の軸線方向にスライド可能に嵌挿されワークWに当接するワーク確認用の筒体4と、シリンダ1に装着されたワーク確認センサ8と、一端が筒体4に取り付けられ他端はワーク確認センサ8の近傍に延在されておりワークWに当接した筒体4の動きをワーク確認センサ8に伝達する連動バー9を兼ねたセンサ用ドグ10とからなるワーク確認手段を備えた。
(もっと読む)
ワーク把持装置
【課題】ロボットに連結されるフレームと、そのフレームに支持された第1乃至第3のクランプ装置を有し、第1乃至第3のクランプ装置のクランプをワークに係合させて、該ワークを把持するワーク把持装置において、1台のワーク把持装置によって各種形態のワークを把持して運搬できるようにする。
【解決手段】第2のクランプ装置9Aを第1のクランプ装置9に対して接近又は離隔する方向に移動可能にフレーム7に支持すると共に、第3のクランプ装置9Bを、第1及び第2のクランプ装置9,9Aのピンクランプ14,14Aを結ぶ直線Lに対して、直交する方向に移動可能にフレーム7に支持する。
(もっと読む)
フロアカーペットモジュール搭載装置およびフロアカーペットモジュール搭載方法
【課題】助力装置の併用を前提として手作業にてカーペットモジュールを車室内に搭載するにあたり、少ない作業工数で容易に作業を行える搭載装置を提供する。
【解決手段】搬送台車はカーペットモジュール2の四隅に設けられたリテーナ11を支持部としてそのカーペットモジュール2を車幅方向で二分する縦二つ折り状態で吊り下げ支持している。助力装置3はカーペットモジュール2を吊り上げ支持するハンド5を備えている。ハンド5は、搬送台車側の支持アームと係合して相対位置決めを司るガイド突起26と、上記相対位置決め状態においてカーペットモジュール2の四隅のリテーナ11の直下までハンド5を下降させた上で上昇させることにより自律的に上記リテーナ11の穴13と係合可能なフック24とを有している。
(もっと読む)
貫通可能な対象物を把持し、保持し更に開放するための装置及び方法
本発明は、貫通可能である、対象物(30)を把持し、保持し更に開放するための装置に関する。装置は、お互いから所定の距離で設置された針の長手方向において、中心軸線を有する少なくとも2つの針(1,2)を具備する。少なくとも1つの駆動ユニットは、針(1,2)に接続して、これらの針を伸張位置と収縮位置との間で駆動する。針の中心軸線の少なくとも1つは、この針が伸張位置にある場合に、円の一部を形成する。更に本発明は、貫通可能である、対象物(30)を把持し、保持し更に開放するための方法を開示する。  (もっと読む)
(もっと読む)
ワーク保持装置
【課題】 構造を簡略化でき、かつ小型化、軽量化を図ることができるワーク保持装置を提供する。
【解決手段】 ワーク40をワーク保持装置1で保持するときには、まず、アーム2を動かしてワーク保持体10を下方へと降下させ、ワーク支持棒20の先端をワーク40の挿入孔40B内に挿入する。次に、エアシリンダ30を伸長させることにより、ワーク支持棒20を傾動させ、この状態でワーク保持体10を引き上げる。ここで、ワーク支持棒20は挿入孔40Bの軸線に対して斜めに傾いているため、ワーク40の挿入孔40Bをワーク支持棒20の外周面に引っ掛けるようにしてワーク40を保持することができる。
(もっと読む)
サンプリング用治具及びその製造方法
【課題】 自然な静電気力や粘着性が小さい微小試料や凸凹の構造体を有する領域にある微小試料を、簡易且つ効率良く採取するサンプリング用治具を提供する。
【解決手段】 微小試料を採取する為のサンプリングニードルを有するマイクロマニピュレータのサンプリング用治具において、前記サンプリングニードルの先端部に、突起を有する。突起の側面に更に小突起を付けてもよい。突起及び小突起は、酸化亜鉛針状結晶である。本発明のサンプリング用治具を製造する方法は、前記サンプリングニードルの先端部を含めた表面又は前記表面の一部分を絶縁材料で覆い隠す工程、前記絶縁材料の一部分を剥離する工程、前記剥離部分上に突起を成長させる工程を有する。
(もっと読む)
刺し込むことのできる対象物の把持装置及びその方法
本発明は、刺し込むことのできる対象物を把持するための把持装置に関するものであって、お互いに角度をつけて配置された少なくとも二つの針(2)と、前記針(2)を延伸位置と引き込み位置との間で長手方向に作動するために前記針(2)に接続された駆動ユニット(3)とを含んでいる把持装置において:前記駆動ユニット(3)を取り付けるためのツールブロック(1)が、剛な接触面(8)を含んでいて、前記針は前記延伸位置と前記引き込み位置との間で前記ツールブロック(1)を出入りするように作動されるようになっていて;そして前記ツールブロック(1)が前記ツールブロック(1)の中に設置された針(2)用のガイド(2a)を含んでいて、前記針は前記延伸位置において交差部分(9)を形成するようになっていることを特徴としている。さらに刺し込むことのできる対象物の把持方法にも関する。  (もっと読む)
(もっと読む)
1 - 13 / 13
[ Back to top ]