
Fターム[3C007ET04]の内容
マニピュレータ、ロボット (46,145) | 指部材の動作形態 (600) | 揺動型 (249) | 交差型 (10)
Fターム[3C007ET04]に分類される特許
1 - 10 / 10
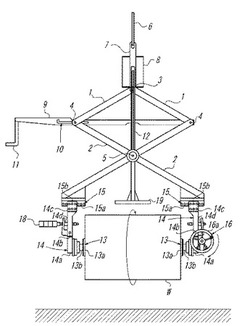
トング式吊具
【課題】
ワークの自重を利用したリンク機構の回転動作でワークを挟込んで吊持するトング式吊具について、装置構成が小型,簡素であるという利点が損なわれず、ワークの吊持作業の安全性が確保されるようにする。
【解決手段】
ワークWの自重を利用したリンク機構の回転動作でワークWを挟込んで吊持するものである。相対してワークWを挟込む挟込支持部13がリンク機構を構成するトングアーム2の下部にそれぞれ回転可能に取付けられている。一方のトングアーム2には、一方の挟込支持部13を回転駆動する回転駆動部16が取付けられている。回転駆動部16は、手動の操作ハンドル16aで回転操作されるウオームギア16b,ウオームホイール16cのギア噛合構造からなる。
(もっと読む)
間接活線把持工具

【課題】 把持部にて種々の断面サイズを有する被把持物を把持できる間接活線把持工具を提供する。
【解決手段】 本発明は、把持部の可動把持片および固定把持片において、これらの少なくとも湾曲内面に弾性部材を配し、前記可動把持片を前記固定把持片に接近させて被把持物を把持する場合に、前記各把持片の互いに対向する湾曲内面と当該被把持物との間に当該弾性部材が介在し、これによって当該被把持物が支持固定されるようにした間接活線把持工具に関する。前記弾性部材は、さらに前記各把持片の把持面をそれぞれ被覆する被覆部を備えることができる。前記弾性部材は、前記各被覆部と、その間を連結する連結体部とで形成でき、また前記各把持片を互いに接近させた場合に、これらの湾曲内面によって形成される開口空間を充填、密閉するように形成してもよい。
(もっと読む)
マニピュレータ
【課題】相対的に小さい把持力量で対象物を把持できる状態と、より大きく、かつ調整可能な把持力量を発生させることができる状態とを使い分けることができるマニピュレータを提供する。
【解決手段】回動軸13で連結され、先端側に開閉する把持部14を有する第1鉗子片11及び第2鉗子片12を備えたマニピュレータ1は、一対の鉗子片の基端側に接続され、軸線方向に進退させることにより一対の鉗子片を開閉させる操作部材20と、第1のバネ定数を有し、弾性変形することにより把持部14に発生する把持力量を第1のバネ定数と操作部材20の牽引量とに基づいて変化させる第1緩衝部15B、16Bと、第1緩衝部15B、16Bの弾性変形を規制するストッパ17A、18Aとを備えることを特徴とする。
(もっと読む)
ロボットハンド
【課題】ワークに対して、左右1対の平面により把持する場合であっても、把持状態を安定させることを可能とするロボットハンドを提供する。
【解決手段】ワーク12を把持するロボットハンド11であって、一対の爪13、14と、一対の爪13、14の間隔を開位置と閉位置の間で開閉するチャック装置16を備える。爪の一方である爪13は、その中間位置に、閉位置において、ワーク12の表面に接触する単一の凸部分13aを有し、爪の他方である爪14は、開位置と閉位置を結ぶ開閉方向に直交する方向の2箇所に、閉位置において、ワーク12の表面に接触する一対の凸部分14aを有する、ことを特徴とするロボットハンド。
(もっと読む)
結合部材及び工具並びにチャック爪
【課題】 一方部材を弾性変形させるだけで、他方部材を簡単かつ迅速に結合することができ、他方部材のみを取り外して簡単迅速に交換できるようにする。
【解決手段】 二つの部材を反復可能に結合してなる結合部材であって、一方部材1は、他方部材2を保持する嵌合保持部1aを有すると共に、嵌合保持部1a部分は外部からの加圧力によりその嵌合保持部1aを開く方向に弾性変形可能に構成する。他方部材2は、常時は嵌合保持部1aへの挿入が不能で、嵌合保持部1aを弾性変形により開いた状態でのみ嵌合保持部1aにスライド挿抜が可能となる嵌め合い形状の外周輪郭部2aを有する。一方部材を加圧力により嵌合保持部1aが開いた状態に弾性変形させた状態のもとで嵌合保持部1aに他方部材2をスライド挿入し、加圧力の解除による一方部材1の弾性復元力により嵌合保持部1aに他方部材2を結合するようにした。
(もっと読む)
医療用器具の製造方法及び医療用器具
【課題】医療用器具の先端部の鋏を、対象物を切断し易いように高精度に組み立てる。
【解決手段】鋏機構1300をユニットとして組み立てる。鋏機構1300は、重ねた一対のエンドエフェクタ部材1308を基端の軸部で所定の擦り合わせ状態でボルト体1217ト及びナット1219により開閉可能に締結する。ボルト体1217は軸線方向に貫通形成された中心孔1217dを有する。連結シャフト18先端に連結されるカバー1160の筒内に鋏機構1300を挿入すると共に、受動板1158に対してリンク1220a、1220bによりエンドエフェクタ部材1308を接続する。鋏機構1300とカバー1160の内面との間に形成される隙間にスペーサ1340を配置する。カバー1160の孔1307とボルト体1217の中心孔1217dとに対し、カバー1160の外面側からピン1196を嵌挿する。
(もっと読む)
空気圧制御式把持装置
【課題】対象ワークを外側からまたは中空の場合は内側から把持可能空気圧制御式把持装置を提供すること。
【解決手段】把持装置は、遠位開口部に続く中間空間と加圧された流体源に接続される誘導槽23’の範囲を内側で定める支持スリーブ16から構成される。中間空間にはグリッパー手段21が遠位開口部に面して取り付けられ、かつ把持できる部分と係合するよう設計される。誘導槽には制御ピストン22が加圧された流体によってグリッパー手段を作動または停止するよう対応する第一位置に、および少なくとも一つの弾性反応要素27によって前記グリッパー手段を停止または作動するのに対応する第二位置に可動に格納される。グリッパー手段は外側から、または空洞を有する場合は内側から、把持できる部分を把持するよう装備されることが可能である。
(もっと読む)
間接活線作業用把持具
【課題】作業者から離れた位置に存在する被把持物を容易且つ確実に把持することができる間接活線作業用把持具を提供することを課題とする。
【解決手段】本発明は、被把持物Wを把持するための一対の接離可能な把持面13,14を備える把持部10と、該把持部10を先端部に取り付けて作業位置に位置決めするための絶縁操作棒2と、前記一対の把持面13,14を接離操作するために前記絶縁操作棒2の基端側に設けられる操作部20とを備える間接活線作業用把持具1において、前記一対の把持面13,14の一方の面13に、該一方の面13の先端から所定距離後端側且つ前記一方の面13から他方の面14に向かって突出するように位置決め片15が突設されることを特徴とする。
(もっと読む)
関節構造体及びロボットアーム
【課題】関節の動きに完全に影響を受けず駆動力を伝達することが可能な関節機構における関節構造体及び該関節構造体を備えるロボットアームを提供する。
【解決手段】第1駆動装置4の駆動により、第2構造体2を第1回転関節回りに回転させ、第3回転ガイドプーリー33に対する、可動回転プーリー10及び第4回転ガイドプーリー34の、第1回転関節回りの回転及び平行リンク構造による回転抑制の結果、ワイヤ7が第3・第4回転ガイドプーリー円周部にかかる量の増減が相殺され、第3回転ガイドプーリーと可動回転プーリーとの距離を不変とする。
(もっと読む)
グリッパー
【課題】 低出力なモータを用いながら、強い把持力で高速に物品を把持できるグリッパーを提供することを目的とする。
【解決手段】 引き伸ばされた状態から復元する際に、把持部材1及び2を閉じる方向に強制揺動する把持用弾発部材5と、馬力と速度との積が把持用弾発部材5の弾性復元力と復元速さの積より小さい駆動部10と、駆動部10の駆動力を増幅して把持用弾発部材5を引き伸ばす増幅部9と、把持用弾発部材5が引き伸ばされた状態で、その復元を阻止するようロックし、外部からの制御によりロック解除可能である係止部材11とを備え、ロックが解除されると、把持用弾発部材5の復元力により把持機構が強い把持力で高速に物品の把持を行う。
(もっと読む)
1 - 10 / 10
[ Back to top ]