
Fターム[3C007HT27]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 歯車 (480) | 遊星歯車 (150) | サイクロ減速機 (14)
Fターム[3C007HT27]に分類される特許
1 - 14 / 14
電気機械装置およびそれを用いたアクチュエーター、モーター、ロボット、ロボットハンド。
【課題】電気機械装置を小型化する技術を提供する。
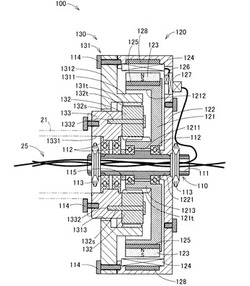
【解決手段】電気機械装置の一種である動力発生装置100は、中心軸110と、永久磁
石123を有するローター121と、ローター121の外周に配置されたステーターであ
る電磁コイル124と、ローター121に連結され、回転駆動力の伝達に用いられる回転
機構部130と、前記回転機構と負荷とを接続する負荷接続部133とを備える。ロータ
ー121には、中心軸110と永久磁石123との間において、少なくとも中心軸110
の軸方向の一方に開口し、回転機構部130の少なくとも一部を収容する収容空間として
の凹部1212が形成されている。回転機構部130は、ローターと接続または一体に形
成される入力部と、ステーターと接続または一体に形成される固定部と、負荷接続部13
3と接続または一体に形成される出力部とを有する。
(もっと読む)
産業用ロボット

【課題】小型化が可能でかつパスラインを低くすることが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、本体部3と、第1アーム4と、第2アーム5と、第3アーム6と、本体部3と第1アーム4とを繋ぐ第1減速機21と、第1アーム4と第2アーム5とを繋ぐ第2減速機22と、第1減速機21の入力軸25と第2減速機22の入力軸32とを連結する連結機構23と、第3アーム6を回転駆動する第2駆動用モータ40とを備えている。産業用ロボット1では、第2アーム5と第3アーム6とを繋ぐ第3関節部の移動軌跡が直線状となるように、第1減速機21の減速比および第2減速機22の減速比が設定されるとともに、連結機構23が所定の速比で入力軸25と入力軸32とを連結している。また、第2駆動用モータ40は、第2アーム5の、第3関節部よりも先端側に、かつ、第1アーム4側へ突出するように第2アーム5に取り付けられている。
(もっと読む)
旋回装置
【課題】許容する旋回範囲の変更が容易であるとともに、高強度のストッパ構造を備える旋回装置を実現する。
【解決手段】旋回装置110は、ケース2と、ケース2に対して相対回転する回転部材と、ケース2に対する回転部材の旋回範囲を制限するストッパ部材108を備える。回転部材の軸線102方向に延びる複数の溝36が、回転部材の軸線102と同心の円弧に沿って並ぶように形成されている。ケース2を固定するためのボルトを通すボルト孔32が、隣接する2つの溝36を画定する突条部34の夫々に形成されている。ストッパ部材108は、その一部が溝36に嵌合するとともにケース2を固定するためのボルトによってケース2に固定されている。
(もっと読む)
ロボット装置
【課題】 低コストで信頼性が高く正確なロボット関節部におけるたわみ補正、力制御等ができるロボット装置を提供すること。
【解決手段】 基台側リンク1に備えた駆動モータ11を駆動制御する制御装置と、この駆動モータの動力を入力軸52、固定軸53、出力軸54の3要素を有する減速機5を介して先端側リンク2に伝達する関節部3を備え、この関節部3は、前記基台側リンク1に筐体が固定され、検出部で前記減速機5の入力軸52の角度情報を検出する第一エンコーダ12と、前記先端側リンク2に筐体21が固定され、検出部22で前記減速機5の入力軸52の角度情報を検出する第二エンコーダ23とを備え、前記制御装置は、前記第二エンコーダ23で検出した前記入力軸52の角度情報に基いて前記駆動モータ11を駆動制御するよう構成されている。
(もっと読む)
関節装置、ロボットアーム、及び、フィンガーユニット
【課題】ロボットの関節装置に組み込まれた減速機に許容外部トルクを超える過大な力が作用した場合でも、減速機に作用する外力を開放して減速機の破損を防止することができる関節装置、ロボットアーム、及び、フィンガーユニットを提供する。
【解決手段】関節部材Jに、リンク部材L1に組み付けられたモータMの出力が伝動機構Tを介して伝達され所定軸心P周りに回転するウェーブジェネレータ31と、ウェーブジェネレータ31の外周部と接合する内周部を備えたフレクスプライン32と、フレクスプライン32の外周部に形成された歯部37と噛合する歯部38が内周部に形成されたサーキュラスプライン34とからなるハーモニックドライブHを備え、フレクスプライン32がトルク制限機構Rを介して一方のリンク部材L1に固定されるとともに、サーキュラスプライン34が他方のリンク部材L2に固定される。
(もっと読む)
ロボット内蔵減速機の故障診断方法及び装置
【課題】各種の減速機について、その磨耗に起因して逐次検出したグリスに含まれる鉄粉濃度を基にグリスの頻繁なサンプリング或いは減速機の点検等から最終的に減速機の交換に至る保守レベルを確認可能にするロボット内蔵減速機の故障診断方法を提供する。
【解決手段】減速機の所定の負荷状態でのモータの積算回転量に対応する仕事量と、鉄粉濃度との関係を規定する磨耗進行特性(図3)を作成し、増加する複数段階の仕事量範囲W1〜W3に対して減速機の交換に至る保守作業の内容を規定する複数段階の保守レベルを磨耗の進行度に応じて指示し得るように、磨耗進行特性を基に鉄粉濃度の許容値上限値をそれぞれ規定する保守レベル指示データを作成し、定期的にグリスをサンプリングした時点の仕事量に対する鉄粉濃度が、許容上限値を上廻るか否かを判断することにより、所属の仕事量範囲W1〜W3の保守レベルを指示する。
(もっと読む)
ロボットのターゲット位置検出装置
【課題】 ターゲットの位置を高精度で検出することができるロボットのターゲット位置検出装置を提供する。
【解決手段】 ロボット22は、X軸、Y軸、Z軸の3軸方向に自由度を有するアーム32の先端部に、水平方向の自由度を有する手首が設けられ、この手首にはエンドエフェクタであるハンド33が設けられる。制御手段23は、教示点を記憶部26に記憶させ、この記憶部26に記憶させた教示点にハンド33が向かうように、ロボット22の動作を制御する。この制御手段23は、制御ループゲインを変化させて、ハンド33のターゲット46への押付け力を変更可能であって、少なくともターゲット46が存在する教示点近傍から、手首軸の制御ループゲインを所定値よりも低下させて、ハンド33をターゲット46に接触させ、ハンド33がターゲット46に接触した状態における位置を取り込んで、ターゲット46の位置を検出する。
(もっと読む)
ロボット等の旋回部構造
【課題】ロボット等の旋回部構造を構造が簡単でかつ安価とする。
【解決手段】駆動モータ50の駆動回転力を出力軸51に固定された外歯車52から特定の1つのクランクピン37aに固定された外歯車53に直接伝達して偏心差動型減速機17のクランクピン37aを回転させるようにしたので、モータの回転駆動力を両端部に外歯車を有する円筒体を介してクランクピンを回転させる場合に比較し、モータの外歯車に噛み合っている円筒体の外歯車を省略することができ、これにより、構造が簡単で安価となる。
(もっと読む)
産業用ロボットの関節装置
【課題】部品点数を抑えた低価格の産業用ロボットの関節装置を提供する。
【解決手段】第一関節部材310及び第二関節部材320を減速機100を介して相対回転させるモータ330が第二関節部材320側に固定され、減速機100が、内歯部材110と、内歯部材110に回転自在に保持された回転部材120と、内歯と噛合う外歯が形成された外歯歯車141,142と、モータ330からの回転により外歯歯車141,142を偏心揺動させるクランク軸151とを有する産業用ロボットの関節装置において、回転部材120,130及び外歯歯車141,142のそれぞれの中央に中空孔を形成する一方、一端が第一関節部材310に係合され、他端が第二関節部材320に係合され、中央部が各中空孔を貫通する保護筒360を備えている。
(もっと読む)
産業用ロボット
【課題】 移動対象物を駆動させるために必要なトルクを小さくすることができる産業用ロボットを提供する。
【解決手段】 第3減速機96と第3駆動機97とが別体に形成されることで、第3減速機96の第3軸線方向寸法を小さくすることができ、第2軸線L2からエンドエフェクタまでの距離を短くすることができる。これによって第1駆動機82および第2駆動機88によってエンドエフェクタを回転駆動させるために必要なトルクを小さくすることができる。したがってエンドエフェクタの重量が大きくなった場合に、第1駆動機82および第2駆動機88に必要なトルクの増加を抑えることができる。これによって従来技術の産業ロボットに比べて、高速動作を行うことができる。
(もっと読む)
清潔空間用ロボット
【課題】 大型の滅菌装置を用いることなく、効果的に滅菌可能なロボットを提供する。
【解決手段】 封止部188によって、清潔空間外107から清潔空間104内に汚染物質が侵入することを防ぐことができ、滅菌駆動部120を清潔空間104に配置し、動力伝達部121を清潔空間外107に配置することができる。滅菌駆動部120を動力伝達部121から分離させて、高温高圧滅菌することで、清潔空間104に属するロボット部分で雑菌が繁殖することを抑えて清潔空間104を清潔に保つことができる。また滅菌駆動部120を、動力伝達部121に対して分離することで、ロボット全体を滅菌する場合に比べて、小形の滅菌装置を用いて滅菌することができる。
(もっと読む)
減速機の製造方法とそのような減速機を組み込むロボット
【課題】
減速機の組立て中に操作者の一部に複雑な介在を必要とせずに減速機のカムが対応駆動フインガーに心合せできるエピサイクロイド減速機を製造する方法を提案すること。
【解決手段】
少なくとも一つの円形カム(13、15)を包含するエピサイクロイド減速機を製造するために、その外周縁(133,153)が静止第二組の歯と共働するのに適し得る第一組の歯(134、153)を設けており、前記カムが減速機の出力軸に固定された支持体(17)に形成された第二孔(176)に静止的に保持した駆動フインガーを受ける少なくとも一つの第一孔(135、155)により貫通されており、カム或いは各カム(13、15)の第一孔(135、155)と支持体(17)の第二孔(176)は一方を他方に整合(X2 )しながら少なくとも部分的に単一作用で機械加工される。
(もっと読む)
減速装置
【課題】産業用ロボットの関節部分に利用される減速装置において、減速装置にかかるトルクが高く、高稼働率で使用される場合の耐久性を向上させる
【解決手段】第1減速機構と第2減速機構を有する減速装置において、第2減速機構は、揺動運動をする外歯歯車と、外歯歯車の揺動運動を公転運動にする内歯歯車と、外歯歯車または内歯歯車のいずれか一方に出力軸を備えている。この減速機構において、内歯歯車の内径Dを140mm≦D≦200mmとして、出力軸に生じるトルクTが、650N・m≦T≦1570N・mの場合、内歯歯車の歯数を、内歯歯車と外歯歯車の歯数差の40倍未満とし、内歯歯車の内径Dを100mm≦D<140mmとして、出力軸に生じるトルクTが、290N・m≦T<650N・mの場合、内歯歯車の歯数を、内歯歯車と外歯歯車の歯数差の30倍未満とする。
(もっと読む)
産業用ロボットの旋回部構造
【課題】 クランクピン40における亀裂発生を効果的に防止する。
【解決手段】 入力歯車48をクランクピン40の軸方向他端部40bにスプライン結合する一方、アイドル歯車54を、入力歯車48が結合された軸方向他端部40bではなく、クランクピン40の軸方向一端部40aに回転可能に支持させるようにしたので、一側の軸受41から突出し、アイドル歯車54を支持しているクランクピン40の軸方向一端部40aに組み立ての都合から要求される段差を無くすることができ、この結果、該軸方向一端部40aには曲げに基づく応力集中が生じることはない。
(もっと読む)
1 - 14 / 14
[ Back to top ]