
Fターム[3C007JS01]の内容
マニピュレータ、ロボット (46,145) | 制御装置の具体的構成 (854) | 制御盤等を含むシステム全体の構成 (484)
Fターム[3C007JS01]の下位に属するFターム
他のロボット等周辺装置と関連するもの (448)
Fターム[3C007JS01]に分類される特許
1 - 20 / 36
ワークピッキングシステム
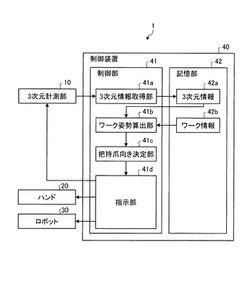
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
サービス提供システム及びサービス提供方法

【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
ロボット制御システム、ロボット制御方法
【課題】高速かつ遅延の少ないデータ送受信をPCと動作制御装置との間で行うことができるロボット制御システムおよびロボット制御方法を提供することを課題としている。
【解決手段】ロボット制御システム1は、動作制御装置2と動作指示装置3を備え、動作制御装置2は、通信部201と、プロキシ部202と、プログラム記憶部203と、コントローラー統括部204と、プログラム実行部205と、ロボット制御部206とを備え、ロボット4が接続されている。動作指示装置3は、通信部301と、プロキシ部302と、データ読出・書込部303と、データ記憶部304と、プログラム部305と、入出力部306とを備え、画像表示装置5と入力装置6が接続されている。また、動作制御装置2と動作指示装置3は、LAN等のネットワークやUSB I/Fを介して接続している。
(もっと読む)
ロボット制御システムにおける通信接続方法及びロボット制御システム
【課題】
コントローラによるロボットの運転状態が再生モードである場合、可搬式操作装置のコントローラに対する通信接続を、生産に影響することなく円滑に行うことができるロボット制御システムにおける通信接続方法を提供する。
【解決手段】
ロボット制御システム100における通信接続方法は、TP10から、ネットワークを介してコントローラ30に通信のログイン要求(接続要求)があった場合、TP10に設けられたログイン処理部18が、非常停止スイッチ12の操作状態、及び、コントローラ30のモード状態を取得して、非常停止スイッチ12の操作状態が非常停止状態で、かつ、モード状態が再生モードのときは、通信の接続要求後のコントローラ30に対する通信接続を認めず、そうでない場合には、通信接続を認可する。
(もっと読む)
展示品説明ロボット及びロボットを使用した展示品説明方法
【課題】説明に係る箇所を指し示すことで視覚的に説明部位を把握し易くし、さらにこのような現物上での指示と音声解説とをリンクさせる。
【解決手段】所望の方向へ移動するための自走手段11と、予め記録された所定の展示品に関する説明を音声で再生するための音声案内手段14と、展示品をレーザポインタ21で指示可能なレーザ指示装置2に対して、所定の展示品の特定の部位にレーザ光を照射するよう命令するための命令手段16と、自走手段11で所定の説明位置まで移動するタイミングと、命令手段16がレーザ指示装置2に対して、所定の展示品へのレーザ光照射命令を発するタイミングと、音声案内手段14で所定の展示品に関する説明の音声を再生するタイミングとを、予め決められた順番で相互に対応させながら実行する手順を記録した記憶手段15とを備える。
(もっと読む)
自律移動ロボット装置及び自律移動ロボット装置の制御方法
【課題】自律移動ロボット装置において、追随目標との間に他の歩行者などの障害物が介入して追随目標までの視野が失われそうになったり、走行経路の生成が不能となった場合においても、追随目標の追随を続行することができるようにする。
【解決手段】走行部1と、周囲の障害物201の有無を計測するとともに追随目標101の位置を計測するセンサ3と、センサ3による計測結果に基づいて障害物201のない移動可能領域を検出し追随目標101を追随する移動予定路を決定しこの移動予定路上を移動させる制御手段2とを備え、制御手段2は、追随目標101までの視界が障害物201により遮られる虞があるとき、または、遮られたときには、追随目標101までの視界を確保する動作を行うことにより、追随目標101を追随する移動予定路の決定を可能とする。
(もっと読む)
移動体制御システムおよび移動体制御方法
【課題】移動体の現在位置を精度良く取得することができる移動体制御システムを提供する。
【解決手段】移動体制御システム1は、移動体100の測定向きを取得する方位取得手段104Aと、音波および電波の少なくともいずれかを発信する発信手段114Aと、移動体周辺の障害物までの測定距離を取得する距離取得手段106Aと、障害物の位置を示す地図データ57Aを格納する記憶手段57Sと、音波および電波の少なくともいずれかに基づいて、移動体100の測定位置を計算する第1の位置取得手段55Bと、測定位置と測定向きと測定距離と地図データとに基づいて、移動体の現在位置を計算する第2の位置取得手段とを備える。
(もっと読む)
移動ロボットおよび移動ロボット制御システム
【課題】高価なセンサを用いることなく、移動ロボットの周囲に存在する障害物をより効率的に検知することができる移動ロボットおよび移動ロボット制御システムを提供することである。
【解決手段】移動ロボット100は、移動ロボットを移動させる移動機構と、複数の第1の距離取得手段106とを含む。複数の第1の距離取得手段106の各々は、複数の測定方向に位置する障害物までの測定距離を取得する。複数の第1の距離取得手段106は、所定時間毎に同期して測定方向を切り替える。移動ロボットは、第1の距離取得手段の間に第1の距離取得手段の測定可能レンジよりも短い第2の距離取得手段126を含む。
(もっと読む)
物品管理システム及び物品管理方法及び物品管理プログラム
【課題】人とロボットの協調作業において、物品の置き場所によって生じる無駄な時間の発生を防ぐ物品管理システム及び物品管理方法及び物品管理プログラムを提供する。
【解決手段】センシング情報を記録する検出履歴データベース304と、人とロボットそれぞれの作業工程の順序と、少なくとも各工程における取扱物品を記録する作業手順データベース306と、前記作業手順の進捗を管理する作業進捗管理手段307と、前記検出履歴データベースから得られる現在の物品の位置と、前記作業手順データベースに記録された作業手順を参照し、環境内の各場所に人が物品を置いたときに、前記物品を置いたことにより発生してしまう余計な困難解消時間を算出する困難解消時間算出手段311と、前記困難解消時間算出手段311により算出された困難解消時間に基づき情報提供する情報出力装置314を備える。
(もっと読む)
ロボット及びユニットコントローラ及び制御ユニット間協調制御方法
【課題】 制御ユニット間で直接障害情報を授受するとともに、制御ユニット間の協調度合いに応じて各制御ユニットの障害対応手段を決定することができ、しかもリアルタイムに制御ユニット間の協調度合いの変更を可能とし、柔軟性の高い協調制御が可能なロボット及びユニットコントローラ及び制御ユニット間協調制御方法を提供する。
【解決手段】 ユニットコントローラ131に、他の制御ユニット110、120との協調度合いの程度を示す協調パラメータ136と、障害が発生した場合に、他の制御ユニット110,120へ障害発生通知を送信する通信処理部132と、他の制御ユニットからの障害発生通知を受信したとき、協調パラメータ136の値により自分の制御ユニット130の障害への対応を決め処理を実行する障害対応手段判定部137を備える。
(もっと読む)
限定された空間を有する構造における同期的なロボット動作
【課題】主翼ボックスの組立てのように、ある作業が構造の反対側で同時に行われる作業の自動システムを提供すること。
【解決手段】構造は限定された空間の内部及び限定された空間の外部から識別可能な位置を有する。第1のロボットシステムは第1のエンドエフェクタが所定の位置上に位置付けられるように限定された空間内で第1のエンドエフェクタを動かす。その位置に対応する第1のベクトルが発生される。第2のロボットシステムは第2のエンドエフェクタが前記位置上に位置付けられるように限定された空間の外部で第2のエンドエフェクタを動かす。その位置に対応する第2のベクトルが発生される。第1および第2のベクトルは第1及び第2のエンドエフェクタが対向して動作するように第1及び第2のエフェクタを新しい位置に動かすために使用される。第1及び第2のエンドエフェクタは新しい位置で同期的に動作を行う。
(もっと読む)
ロボット制御システム
【課題】 産業用ロボットは、予め教示装置を使用して教示された動作を再生することで所定の作業を行う。通常、教示した動作を再生する際、作業者は安全防護柵外に退出した後、ロボット制御装置の盤面で運転指令を発行するが、この時教示装置を持った作業者がロボット周辺にいると、この作業者に危害を及ぼす恐れがある。
【解決手段】 安全防護柵の入り口に教示装置を携帯した作業者の通過を検出し、結果を教示装置に通知する通過検出手段を設け、教示装置に前記通知の受信手段を設け、教示装置は前記通知に対するロボットの動作モード変更等の操作可否を判断する。
(もっと読む)
走行ロボット
【課題】監視巡回する走行ロボットにおいて、カーブを支障なく通り抜けるとともに、不審者でない小動物を不審者と誤認することがない走行ロボットを提供する。
【解決手段】巡回ルートのカーブにさしかかると、走行ロボットはカーブ入り口標識を検出し、レーダを起動させ進行方向の左右にレーダ波を送出する。このレーダ波の反射によって左右の通り抜け可否を判断し、進行方向を変える。また焦電センサで小動物らしき熱源を検出したら、走行ロボットは搭載しているレーダとカメラを起動しこの情報を無線で警務者に送出する。警務者は小動物であると判断したら走行ロボットにレーダの停止と警報をオフする命令を送出する。
(もっと読む)
物品推定システム
【構成】音声認識、視線、指差し方向のそれぞれに基づいて人間の指示する物品を特定する(S37、S39)。人間が指示する物品を示す単語が音声認識辞書に登録されておらず音声認識できなかった場合、視線および指差し方向に基づいて特定した物品の名称を示す単語と音声認識できなかった物品を示す単語の音素記号列とを対応つけて音声認識辞書に登録する(S69)。
【効果】 人間独自の略語や地方の方言など音声認識辞書に登録されておらず音声認識できなかった単語を、手間をかけずに音声認識辞書に登録して音声認識できるようにすることができる。
(もっと読む)
移動体、移動体システム、及びその故障診断方法
【課題】確実に発信機の故障を検出することができる移動体、移動体システム、及び故障診断方法を提供すること。
【解決手段】本発明の一態様にかかる移動体は、環境中に設けられた発信機161から発信された信号に基づいて移動する移動体であって、発信機161から発信された識別情報を含む信号を受信する受信機126と、位置を推定する自己位置推定部111と、地図上での発信機161の位置情報を参照して、推定位置が発信機161からの識別情報を取得可能な取得可能領域にあるか否かを判定する判定部112と、推定位置が取得可能領域にある場合に、受信機126が識別情報を取得できたか否かに応じてカウント動作を行う故障カウンタ113と、故障カウンタ113のカウント値に基づいて発信機161の故障を診断する診断部114と、を備えるものである。
(もっと読む)
産業用ロボットの制御装置
【課題】ロボット本体1の各関節軸を動作させるモータ2を駆動制御するサーボアンプ5を有する産業用ロボットの制御装置4において、サーボアンプ5自体で自動的に故障診断を正確かつ確実に行うことが可能な産業用ロボットの制御装置を提供する。
【解決手段】サーボアンプ5は、モータ2を駆動する制御信号を出力するパワー回路部7と、パワー回路部7から出力された制御信号に基づいてサーボアンプ5の故障の有無を診断する故障診断回路部10と、モータ2の電流値および位置情報に基づいて異常を検出する異常検出回路部8と、異常検出回路部8において異常を検出していない場合にはパワー回路部7から出力された制御信号をモータ2へ入力させるように選択するとともに、異常検出回路部8において異常を検出した場合にはパワー回路部7から出力された制御信号を故障診断回路部10へ入力させるように選択するマルチプレクサ9と、を有するようにした。
(もっと読む)
マニプレータシステム
【課題】マスタースレーブ方式のマニプレータにおいて、簡便な手法で作業者とマスターアームの干渉を無くし、作業者の動作範囲を広く確保する。
【解決手段】腕部11及びハンド部20を有するマスターアーム10と、マスターアーム10の動作に追従するスレーブアーム30とを備えたマニプレータシステム1であって、作業者Pがマスターアーム10に動作を入力する動作入力部が、マスターアーム10のハンド部20に設けられ、マニプレータシステム躯体へのマスターアーム10の取付部が、ハンド部20を挟んで、作業者Pの操作位置A1に対向するように設けられている。
(もっと読む)
産業用ロボット及び産業用ロボットの初期設定方法
【課題】予め想定される制御から所望の制御を選択可能とさせ、所望のラダー回路のプログラムを容易に且つ選択的に組むことが可能な産業用ロボットの提供。
【解決手段】 プログラマブルロジックコントローラPLCと信号入出力可能に接続されて入力指示を与える入出力インターフェース4を具備したロボット1であって、
プログラマブルロジックコントローラPLCは、周辺機器に予め定められた動作を行わせる動作プログラムの先頭に、該一連の動作を行わせるか否かを選択可能とする複数の接点プログラムを設けて構成し、
入出力インターフェース4に、前記各接点プログラムのON・OFF指示可能な入力部を複数備え、所望の動作が可能なように入力部を適宜選択してON状態とすることで、所望の動作が可能なラダープログラムを産業用ロボット1に組み込み可能とする。
(もっと読む)
生産システム用汎用セル及び該汎用セルを用いた生産システム
【課題】生産システムを構成する汎用セルとしての高い汎用性によってラインレイアウトの自由度を高く維持し、ひいてはライン構成の変更等に際しての時間的、コスト的なロスをより好適に削減する。
【解決手段】生産システムを構成する汎用セルとして、被加工物(ワーク)の加工に最低限必要とされる要素、すなわちロボット60が支持されたベースユニット10、ロボット60に対してワークの部品を供給する部品供給ユニット20、そしてベースユニット10の外側に延設される加工エリア30をセットとして1つの汎用セル100を構成する。ベースユニット10は、平面形状が四角形からなって、少なくともワークの搬送に用いられるロボット60をこの四角形からなる平面領域上を移動可能に支持する。そして、このロボット60の動作範囲を、加工エリア30の少なくとも一部を含むかたちで、ベースユニット10の内側から外側に至る範囲に設定する。
(もっと読む)
溶接ロボットシステム
【課題】加工効率が高い溶接ロボットシステムを提供する。
【解決手段】溶接ロボットシステム100は、軌条112に沿って往復運動を行う2組のポジショナ111a及び111bを有する搬送装置110と、この搬送装置110に加工対象物200を搬入及び搬出するコンベヤ部160と、加工対象物200に対し溶接を行う2組の溶接ロボット180a及び180bと、を備え、2組のポジショナ111a及び111bは、軌条112に沿って往復運動が可能で且つ旋回可能である旋回ギヤ124と、この旋回ギヤ124上に立設された支柱126と、この支柱126に沿って昇降運動が可能な昇降体139と、この昇降体139に対して垂直方向に固定された昇降フレーム140と、この昇降フレーム140の先端に取り付けられ水平方向及び垂直方向に回転可能であるエンドエフェクタと、を有している。
(もっと読む)
1 - 20 / 36
[ Back to top ]