
Fターム[3C007JS07]の内容
マニピュレータ、ロボット (46,145) | 制御装置の具体的構成 (854) | 通信、データ伝送の方法と処理 (152)
Fターム[3C007JS07]に分類される特許
1 - 20 / 152
ロボット制御装置、教示装置及びロボットシステム
【課題】
教示装置と通信が確立していないときに、障害が発生したロボット制御装置側から教示装置に対して通信確立を要求するため、複数のロボット制御装置の中から作業者が、障害が発生しているロボット制御装置との通信を迅速かつ正確に確立することができるロボット制御装置、教示装置及びロボットシステムを提供する。
【解決手段】
ロボット制御装置20の通信制御部22は障害が発生したときに、特定のティーチペンダント10と無線通信が確立していない場合、特定のティーチペンダント10に関する接続先情報を宛先にした通信確立要求を出力する。第3記憶部24cは返信された特定のティーチペンダント10に関する送信元の固有の送信元情報を記憶する。通信制御部22は通信確立要求応答があった後、送信元情報を宛先として、返信したティーチペンダント10に対して交信を行う。
(もっと読む)
位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラム

【課題】専用の部材を取り付けなくても、ロボットであることを識別することができる、位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラムを提供する。
【解決手段】第1の位置情報取得部2は、物体の第1の位置情報を取得し、第2の位置情報取得部302は、移動体の移動に基づく第2の位置情報を取得し、位置情報認識部303は、前記物体の第1の位置情報の時系列と前記第2の位置情報の時系列とを照合し、前記第2の位置情報の時系列が合致する前記物体の第1の位置情報の時系列を、移動体の位置情報の時系列と認識する。
(もっと読む)
ロボットシステム
【課題】自走式のロボットを適用して、被検者である人間に対して所定の処置を確実にかつ低コストで行うことができるロボットシステムを提供する。
【解決手段】移動可能なロボット100と、シート状に形成され、上面における被検者200の位置および姿勢を検出するシートセンサ10と、シートセンサ10に設けられ、シートセンサ10により検出された被検者200の位置および姿勢に関する情報、ならびに、シートセンサ10の位置および向きに関する情報を送信する第一,第二送信部23,32と、ロボット100に設けられ、第一,第二送信部23,32により送信される情報を受信する受信部111と、ロボット100に設けられ、受信部111により受信した情報に基づいて、ロボット100が被検者200に対する所定の処置を行うようにロボット100を制御するロボット制御部112を備える。
(もっと読む)
通信システム
【課題】ロボットなどの関節モジュールを交換するための活線挿抜時に通信エラーを生じない通信システムを提供する
【解決手段】この通信システムの親局は、最上位の子局と物理的に接続し、バスラインにより最上位の子局と電気的に接続し、バスラインを終端し、複数の子局と通信する。またこのシステムの複数の子局の各々は、バスラインを上位局とに接続し、更にバスラインの終端か下位局との接続に切換え、最下位局は、バスラインを終端した状態にあり、また最下位局以外の子局は、バスラインを下位局接続コネクタに接続した状態にあって、最下位局に子局と同機能を有する新子局を挿入する場合には、最下位局の下位局接続コネクタに新子局の上位局接続コネクタが物理的に接続された後、最下位局が親局から挿入指示を受信し、最下位局が、前記バスラインを終端から下位局の上位局接続コネクタに接続すること特徴とする。
(もっと読む)
信号送受信装置
【課題】安価かつ簡易な構成で、安定した動作を可能とする歩行補助装置用の信号送受信装置を提供する。
【解決手段】本発明は、歩行補助装置を制御するために、信号を送受信する信号送受信装置であって、人体に接触可能な送信電極と、前記送信電極が前記人体に接触された場合に信号を送信する信号送信手段と、を有する送信部と、前記人体に接触可能な受信電極と、前記信号送信手段から送信された前記信号が前記受信電極を介して受信される信号受信手段と、を有する受信部と、を備え、前記送信電極と前記信号送信手段とは、所定距離以上離れていることを特徴とする。
(もっと読む)
生産システム
【課題】ワークを把持したロボットが複数の処理装置間を順次移動してワークを製品化する生産システムにおいて、ロボットと処理装置との間のワークの授受位置を自動で効率的に取得可能とし、システムのフレキシビリティの向上を図る。
【解決手段】処理装置4は、指向性のある無線の通信部41を備え、ロボット3は、処理装置4の通信部41との間で相互に通信する指向性のある無線の通信部31と、処理装置4上の所定の特徴点42を撮像して位置認識を行う画像処理部(CCDカメラ32a)と、ハンド部33と、を備え、ロボット3は、相互の通信部31,41を用いて処理装置4に対する位置関係を検出し、その検出の後に、画像処理部を用いて特徴点42を認識することにより処理装置4に対する精密な位置関係を検出し、これに基づいてワークの授受位置を取得する。2段階の位置検出により、狭いカメラの撮像範囲で精度良く効率的に位置を取得できる。
(もっと読む)
シミュレーション装置
【課題】被制御装置の模擬が実行可能になるまでに要する時間が短く、且つ、被制御装置を正確に模擬することができるシミュレーション装置を提供する。
【解決手段】シミュレーション装置20は、制御装置10の制御対象である被制御装置を模擬するものであって、被制御装置を構成する機器毎の特性を示す情報が格納された設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が予め設定された基準速度よりも速い機器を模擬するシミュレーションPLC21と、上記の設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が基準速度よりも遅い機器を模擬するシミュレーションPC22とを備える。
(もっと読む)
ロボット装置、ロボット装置の制御方法およびプログラム
【課題】ユーザとロボットの間で対象に関する共同注意の成立を補助可能な、ロボット装置、ロボット装置の制御方法およびプログラムを提供する。
【解決手段】対象Oに関する共同注意の成立をロボット100に促すための指令をユーザ10から取得するコマンド受信部151と、指令の取得に応じて、光束Lの照射により対象を指示するためにユーザにより操作されるポインタ200の位置および姿勢を推定する位置姿勢推定部159と、位置および姿勢の推定結果に基づき、光束の照射により指示されている対象の方向を特定し、方向の特定結果に基づき、周辺環境を表す環境地図EM上で対象を特定する対象特定部160とを備える。
(もっと読む)
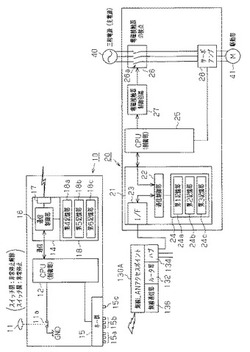
機械の操作装置
【課題】
ティーチペンダントの非常停止スイッチが有効に機能していない状態にも関わらず、有効に機能しているものとして報知することがある。
【解決手段】
TP(ティーチペンダント)100は非常停止SW110と、非常停止SW110の状態に応じて発光する発光体Lと、非常停止SW110の接点状態を監視し、接点状態に応じて光源制御信号を出力する第1CPU120,第2CPU130を備える。光源制御回路125は発光体Lを光源制御信号に基づいて制御する。ウオッチドッグ回路160は、第1CPU120,第2CPU130の作動状態を監視し、異常の場合に光源制御回路125に対し発光体Lの制御を禁止する。非常停止SW110が有効に機能していないにも関わらず機械を緊急停止させようとする行動を回避させることができる。
(もっと読む)
ロボットのコントローラ
【課題】制御命令を適切に受信できなかった場合に、どこに問題があるのかを特定することができるロボットのコントローラを提供する。
【解決手段】受信したパケットは、パケット格納用メモリに一時的に格納される。コントローラの制御部は、受信したパケット格納用メモリに格納された全てのパケットに対してパケット確認処理を実行する。このパケット確認処理では、各パケットのそれぞれについて、個別に正常または異常という判断がなされる。制御部は、正常であると判断したパケットのシリアル番号を正常に受信した旨を表すデータとともに外部に出力する。正常でないと判断したパケットについては、正常であると判断したパケットの1つ後に受信したパケットという形で特定し、その旨を表す異常データを外部に出力する。
(もっと読む)
無線伝送装置とそれを用いたロボットの振動抑制制御装置およびロボット制御装置
【課題】無線化した加速度センサをロボットに取り付ける場合、センサを用いた振動抑制の効果を向上できるとともにセンサ基板における消費電力が低減できるようにする。
【解決手段】センサ信号の主成分の振動パラメータ(周波数、振幅、位相)を得る信号解析装置と、該パラメータからセンサ信号の近似波形を生成する信号発生器81を備えて、該パラメータが変更された場合のみパラメータの無線伝送を行う。得られる近似波形から各軸モータの速度を求め、シミュレーションによりロボット動作に基づくモータ速度を得て、モータ速度の差をモータ速度の振動成分とする。モータ速度の振動成分をモータの位置−速度制御ループにフィードバックしてロボットアームに発生する振動を抑制する。
(もっと読む)
ロボットコントロール装置、ロボットコントロール方法
【課題】CPUが動作制御装置を単独で制御する用途、および、CPUを備えず動作指示装置からの指示に基づきロボットの動作制御する用途の両方の使い方を可能にするロボットコントロール装置、ロボットコントロール方法を提供することを課題とする。
【解決手段】ロボットコントロール装置1は、動作指示装置2と動作制御装置3とを備えている。動作制御装置3は、ロボット4が信号線5を介して接続されている。動作制御装置3は、通信ユニット300と動作制御ユニット400を備え、通信ユニット300と動作制御ユニット400とは、BUS端子302とBUS端子401を用いて接続され、通信ユニット300は、通信部301と、BUS端子302とを備え、動作制御ユニット400は、BUS端子401と、拡張ユニット判別部402と、実行部403と、第1記憶部404と、第2記憶部405と、ロボット制御部406とを備えている。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】制御対象などの停止位置精度を向上させる。
【解決手段】駆動装置(1A)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(30)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(40)と、駆動部(10)を制御する制御部(500A)と、を含んで構成される駆動装置(1A)であって、第1の位置検出器(30)と第2の位置検出器(40)と制御部(500A)との間において第1の位置情報と前記第2の位置情報とを伝達する伝送路(200A)を備え、制御部(500A)は、位置要求信号に対して互いに同期して検出させた第1の位置情報と記第2の位置情報とのうち少なくとも一方を用いて駆動部(10)を制御する。
(もっと読む)
ロボット同期化装置及びその方法
【課題】ロボット同期化装置及びその方法を提供する。
【解決手段】本発明の一実施形態によるロボット同期化装置は、仮想ロボットを操作する命令を入力され、入力された操作命令に基づいて、実機ロボットの物理的なモデル及び動作が定義されたデータを基に仮想ロボットの動作をモデリングし、モデリングされた仮想ロボットを出力する。
(もっと読む)
ロボット制御装置、ロボット制御システム及びロボット制御方法
【課題】複数のロボットの協調動作における各ロボット制御装置間の同期を精度良く確立する。
【解決手段】複数のロボット4−1〜4−3と、各ロボットを制御する複数のロボット制御装置2、3−1、2とを用い、ロボット制御装置毎に設定される制御周期に同期させて各ロボットを協調動作させるシステムのロボット制御装置であって、マスタ側のロボット制御装置2の制御周期における所定のタイミングで生成された同期信号の入力タイミングと、スレーブ側のロボット制御装置3−1、2の制御周期における所定のタイミングで生成された保持信号の入力タイミングとを検出するタイミング検出部32と、保持信号の出力から所定期間経過後に同期信号と保持信号の各入力タイミングのタイミング差を読み込み、それ基づいてスレーブ側のロボット制御装置3−1、2の制御周期を変化させる制御部31とを備えている。
(もっと読む)
ロボット制御システム、ロボット制御方法
【課題】高速かつ遅延の少ないデータ送受信をPCと動作制御装置との間で行うことができるロボット制御システムおよびロボット制御方法を提供することを課題としている。
【解決手段】ロボット制御システム1は、動作制御装置2と動作指示装置3を備え、動作制御装置2は、通信部201と、プロキシ部202と、プログラム記憶部203と、コントローラー統括部204と、プログラム実行部205と、ロボット制御部206とを備え、ロボット4が接続されている。動作指示装置3は、通信部301と、プロキシ部302と、データ読出・書込部303と、データ記憶部304と、プログラム部305と、入出力部306とを備え、画像表示装置5と入力装置6が接続されている。また、動作制御装置2と動作指示装置3は、LAN等のネットワークやUSB I/Fを介して接続している。
(もっと読む)
動物体の監視装置
【課題】
時間と労力を大幅に省き、特別な技能をもった人に限らず設置や移動作業が可能になり、電波を発する無線発信手段を、動物体の位置監視対象部位に存在させて位置監視対象部位が設定した三次元空間領域内に収まっているかどうかを安定して監視できる動物体の監視装置を提供する。
【解決手段】
ID情報82を発信する無線発信機30等と、受信範囲の一部が重なり合った複数の領域を有するように設けられたアンテナ61等と、無線発信機のID情報を記憶する記憶手段22aと、各受信信号の信号強度を検出する信号強度測定部43と、記憶手段22aが記憶したID情報と、各受信信号のID情報82が一致し、かつ各受信信号の信号強度の検出結果に基づき、前記領域に無線発信機30等が存在するか否かを判定する判定部22を備える。
(もっと読む)
インターアクティブロボット制御システム及び使用方法
【課題】多自由度なヒューマノイドロボットに対する柔軟で拡縮可能な統合的制御アーキテクチャを提供する。
【解決手段】ロボットシステムは、関節、アクチュエータ、及びセンサを有するロボットと、分散コントローラとを備えている。コントローラは、コマンドレベルのコントローラと、それぞれが各関節を制御する組込み関節レベルのコントローラと、関節の動きを協働させる関節協働レベルのコントローラとを有している。中央データライブラリ(CDL)は、全ての制御及びフィードバックデータを集め、ユーザーインターフェースは、そのCDLを使用して、各関節、アクチュエータ、及びセンサの状態を表示する。パラメータ化された動作シーケンスは、リンクした各イベントの階層を有し、それにより、コマンドデータがリアルタイムで修正できる。
(もっと読む)
分散されたコンピュータネットワークを使用してロボットシステムを制御するためのフレームワークおよび方法
【課題】分散されたコンピュータネットワークを使用してロボットシステムを制御するためのフレームワークおよび方法を提供すること。
【解決手段】人間型ロボットは、複数のコンプライアントロボット関節と、アクチュエータと、様々な制御ポイントからの制御データに応じて制御可能である他の一体化されたシステムデバイスとを有し、これらの制御ポイントにおいてフィードバックデータを測定するためのセンサを有する。このシステムは、多数の高速通信ネットワークを介して一体化されたシステム構成要素を制御するための多重レベル分散された制御フレームワーク(DCF)を備える。このDCFは、ロボット関節などの一体化されたシステム要素の中にそれぞれが組み込まれる複数の第1の制御装置と、第1の制御装置を介してこれらの構成要素を調整する第2の制御装置と、自立型のタスクの実施を命ずる信号を第2の制御装置に送信する第3の制御装置とを有する。
(もっと読む)
移動体
【課題】断線の発生に伴い移動体の状態の連続性が損なわれる事態を防止する
【解決手段】上位制御部200から配線500を介して中間制御部400に出力される指示信号を、中間制御部400の指示信号記憶部413に記憶させ、この指示信号記憶部413に記憶されている指示信号に応じた制御信号を、電動モータのドライブ回路ユニットなどを含む制御ユニット50に対して出力する。
(もっと読む)
1 - 20 / 152
[ Back to top ]