
Fターム[3C007JT09]の内容
マニピュレータ、ロボット (46,145) | 操縦桿 (385) | 従部と電気的に接続されているもの (361) | マニピュレータ自体を操縦桿とするもの (41)
Fターム[3C007JT09]に分類される特許
1 - 20 / 41
パワーアシスト装置
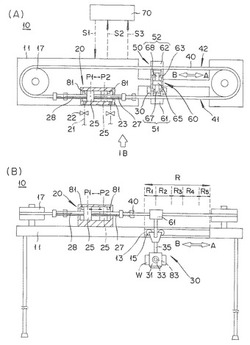
【課題】小型化および製造コストの低減が図られたパワーアシスト装置を提供する。
【解決手段】パワーアシスト装置10の制御部70は、クランプ部50による伝達部材40のクランプまたはアンクランプを切り替えることによって、ピストン25の移動を、搬送部材40を移動するためのアシスト力または搬送部材を制動するためのアシスト力に変換し、搬送経路Rに沿ってワークWを搬送させる搬送作業を円滑に行うことを可能にする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム

【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
動作補助装置
【課題】人の関節に適切なトルクを付与して動作を補助する動作補助装置を提供する。
【解決手段】動作補助装置は、記憶モジュール、人の関節の角度を計測するセンサ、特定関節にトルクを加えるモータを有する装具、制御器を備える。記憶モジュールは、人の動作に伴って実現されるn個の関節角の第1時刻から第2時刻までの既知軌道群と、各既知軌道に対応するs次元の既知時系列データ群を記憶している。制御器は、計測されたn個の関節角の時系列データによるn次元計測軌道を取得し、その計測軌道に対応するs(n>s)次元の計測時系列データを算出する。制御器は、中間時刻までの各既知時系列データを計測時系列データと比較し、計測時系列データに最も近い既知時系列データを特定し、中間時刻以後に設定されている時刻以降に、特定された既知時系列データに対応する既知軌道における特定関節の軌道に、特定関節の角度が追従するようにモータを制御する。
(もっと読む)
形状測定装置
【課題】測定者の操作に応じて関節部の回転動作を補助するように構成された形状測定装置を提供する。
【解決手段】形状測定装置100は、光学式センサ40により被測定物体51を非接触で走査して当該被測定物体51の形状の測定情報を出力するプローブ12と、アーム部11a及び2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bの各々に設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、関節部11bに設けられ、当該関節部11bにより接続された一方のアーム部11a若しくはプローブ12を他方のアーム部11aに対して回転駆動させる駆動部15と、角度情報からプローブ12の移動を検出して駆動部15を作動させる制御部20と、を有する。
(もっと読む)
姿勢データ入力装置
【課題】より自然な姿勢データを簡易に入力できる技術を提供する。
【解決手段】姿勢データ入力装置は、ユーザが操作可能な複数の関節部を備えるロボット人形と、複数の関節部を駆動する制御手段と、ユーザ操作と制御手段による駆動が加えられた後の各関節部の角度データを姿勢データとして取得する取得手段を備える。各関節部の可動範囲を記憶しておき、制御手段によって各関節部がこの可動範囲内に収まるようにフィードバック制御することが好ましい。また、姿勢データを複数記憶しておき、ユーザが一部の関節部を操作すると、それに対応する姿勢データを抽出して、ロボット人形が抽出された姿勢データに従うようにフィードバック制御することも好ましい。さらに、既存の動作データをロボット人形で再生しつつ、その際に関節部の姿勢変化を許容して、動作データの編集を行うことも好ましい。
(もっと読む)
マニピュレータの操作評価装置及びこれを備えたパワーアシスト装置
【課題】マニピュレータの操作性を客観的に評価することのできる操作評価装置と、これを備えたパワーアシスト装置を提供する。
【解決手段】操作者により操作される操作部1、2と、該操作部1、2の操作入力に基づいて複数の動作を行う動作部11とを備えたマニピュレータに於いて、前記操作部1、2によるマニピュレータの操作性を評価するための操作評価装置であって、前記動作部11を基準位置から目標位置にまで到達させる一の動作を行わせるために要した操作部1、2の操作時間と、前記動作部11が到達した位置と目標位置との差と、前記操作部1、2の操作入力に、前記動作部11に他の動作を行わせるための操作入力が付加された場合に於いて該付加された操作入力量とを評価要素としてマニピュレータの操作性を評価する評価手段を備えている。
(もっと読む)
マニプレータシステム
【課題】マスタースレーブ方式のマニプレータにおいて、作業者の労力を軽減する。
【解決手段】マスターアーム10と、マスターアーム10の動作に追従するスレーブアーム30とを備えたマニプレータシステム1であって、マスターアーム10は、自由度7以下の腕部11、ハンド部20及び先端の位置が検出可能な自由度8以上の紐状センサ17を有する。作業者Pがマスターアーム10に動作を入力する動作入力部は、マスターアーム10のハンド部20に設けられている。
(もっと読む)
マニプレータシステム
【課題】マスタースレーブ方式のマニプレータにおいて、作業者の労力を軽減する。
【解決手段】マスターアーム10と、マスターアーム10の動作に追従するスレーブアーム30とを備えたマニプレータシステム1であって、マスターアーム10は、自由度7以下の腕部11、ハンド部20及び先端の位置が検出可能な自由度8以上の紐状センサ17を有し、作業者Pがマスターアーム10に動作を入力する動作入力部が、マスターアームのハンド部20に設けられ、紐状センサ17の一端175が作業者Pの頭、首、または体幹に装着され、他端176がマスターアーム30の腕部11の先端部若しくはハンド部20、又は作業者Pの手、手首部若しくは前腕部に取り付けられている。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置を用いてワークを搬送する際にワークが破損することを防止しつつ、パワーアシスト装置によるワークの搬送効率を改善するために、搬送途中においてワークの姿勢を容易に安定させることができるパワーアシスト装置およびその制御方法を提供する。
【解決手段】制御装置5は、角度センサ7により検出するフリージョイント4が回転を許容する任意の自由度の方向へのワーク保持装置3の回転角度θが、予め定めた下限角度θL以下である場合か、または、予め定めた上限角度θH以上である場合には、ブレーキ機構4aの解除状態を維持してフリージョイント4が回転を許容する任意の自由度の方向へのワーク保持装置3の回転を規制しないように制御する。
(もっと読む)
腕運動支援装置
【課題】 従来までの上半身の動きを補助するための装置においては、前記補助装置を利用する際、利用者は自身の腕を前記補助装置に固定する必要があり、前記装置の利用者は、前記装置の装着時に違和感を感じることを余儀なくされていた。
【解決手段】 本発明は、利用者の上腕部分および前腕部分を支える、アルファベッドの「U」のような形などをした支持体を有し、前記前腕部分の支持体に、かまぼこ型状でありその表面が滑りやすい材質からなるセンサーを備えた腕運動支援装置である。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】ロボットが環境に接触しても発振現象を生じることがなく、安定した接触状態を維持できるパワーアシスト装置およびその制御方法を提供する。
【解決手段】制御装置6によって、ロボットアーム2が環境と非接触の場合、ロボットアーム2に提示する仮想の非接触時摩擦力FLを設定し、非接触時摩擦力FLが操作ハンドル4に作用するようにアクチュエータ5を制御し、あるいは、ロボットアーム2が環境と接触し、操作力fmと外力feの向きが一致する場合には、ロボットアーム2に提示する仮想の非接触時摩擦力FLを設定し、非接触時摩擦力FLが操作ハンドル4に作用するようにアクチュエータ5を制御し、あるいは、ロボットアーム2が環境と接触し、操作力fmと外力feの向きが一致しない場合には、ロボットアーム2に提示する仮想の接触時摩擦力FHを設定し、接触時摩擦力FHが操作ハンドル4に作用するようにアクチュエータ5を制御する。
(もっと読む)
ロボット操作入力装置およびそれを備えたロボット
【課題】操作者の動作に追従するようにロボット脚を操作することのできるロボット操作入力装置を、従来よりも少ない数のセンサにて実現する。
【解決手段】ロボット操作入力装置は、歩行可能な脚2を有するロボット1の当該脚2を操作するための入力装置である。ロボット操作入力装置は、操作者100の足115を支持する足支持部材32と、足支持部材32と一体化されまたは足支持部材32に取り付けられ、操作者100のくるぶしに追従して動く追従部材31と、追従部材31に取り付けられた6軸力覚センサ20と、を備えている。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】ワークを目標に合わせる場合は、ブレを補正して目標軌道に沿いやすくするとともに、軌道の変更・修正を行う場合は、ワークをスムーズに移動できるように制御するパワーアシスト装置およびその制御方法を提供する。
【解決手段】操作ハンドル6と、操作ハンドル6に加えられた操作力とその向きθhを検出する力センサ7と、ロボットアーム3と、アクチュエータ11と、を備えるパワーアシスト装置50の制御方法であって、操作力の向きθhが、予め定めた操作ハンドル6の進行方向に対して所定の角度範囲内であると検出された場合には、操作ハンドル6を、操作力の進行方向成分のみを採用して、進行方向Aに沿って進行させるようにアクチュエータ11を駆動し、操作力の向きθhが、前記所定の角度範囲外であると検出された場合には、操作ハンドル6を、操作ハンドル6に加えられた操作力とその向きで進行させるようにアクチュエータ11を駆動する。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置によるワークの搬送効率や、パワーアシスト装置を用いてワークを組み付ける場合の位置決め精度を改善するために、搬送途中におけるワークの姿勢を安定させるとともに、作業者による微妙な位置決めを可能とするパワーアシスト装置およびその制御方法を提供する。
【解決手段】接圧センサ3e・3e・・・により、ウィンドウ10に作用する押圧力Fe1〜Fe4を検知し、検知結果を制御装置5に入力する第一押圧力検知工程と、制御装置5により、検知した押圧力Fe1〜Fe4が、予め設定した第一閾値Fcを越えているか否かを判定する押圧力判定工程と、制御装置5により、デッドマンスイッチ6・6・・・が入状態であるか否かを判定するデッドマンスイッチ判定工程と、制御装置5により、第一押圧力検知工程と押圧力判定工程とデッドマンスイッチ判定工程の各結果からフリージョイント4の回転規制を解除するか否かを判定する。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】急停止・急発進に伴うワークの揺れによってワークと相手ワークとが接触することを防止できるパワーアシスト装置及びその制御方法を提供する。
【解決手段】操作ハンドル6と、力センサ7と、ウィンドウ2を保持するロボットアーム3と、ロボットアーム3を駆動するアクチュエータ11と、ロボットアーム3を搬送する搬送手段14と、を備え、搬送手段14を組立ライン上を移動しているボディ100と同期して移動させて、ウィンドウ2をボディ100に組付けるパワーアシスト装置50の制御方法であって、ボディ100の動作状態が、移動状態を継続している通常時には、搬送手段14がボディと同期して移動するように制御し、ボディ100の動作状態が、移動状態から停止状態もしくは停止状態から移動状態へと変化した場合には、ロボットアーム3の駆動を、所定時間の間停止させ、所定時間が経過後、ロボットアーム3の駆動を再開する。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】ワークを傾斜させながら搬送する場合に、パワーアシスト装置による位置決め精度を確保しつつ、搬送効率の改善を図るべく、ワークを傾斜させながら搬送しても、作業者の操作力が小さく、また作業者が所望する操作方向と実際にワークの変位方向が一致する、操作性の良いパワーアシスト装置およびその制御方法を提供する。
【解決手段】ワーク保持装置3と、ハンドル3cと、ハンドル3cに作用する作業者の操作力を計測する力センサ3dと、ワーク保持装置3を支持するロボットアーム2と、力センサ3dの計測結果に基づいてロボットアーム2の動作を制御する制御装置5と、を備えるパワーアシスト装置1の制御方法であって、ワーク保持装置3には、ワーク保持装置3の傾斜角度を計測する角度センサ6が備えられ、角度センサ6の計測結果と、力センサ3dの計測結果に基づいて、制御装置5によって、ロボットアーム2の動作を制御する。
(もっと読む)
手術支援システムにおいて用いられるマスタ・マニピュレータ
【課題】操作時における疲労が少なく、かつ操作しやすいマスタ・マニピュレータを提供する。
【解決手段】把持部23を支持する並進機構部24は、第1〜第6リンクL1〜L6を備える。第1リンクL1の一端側は、基台26に対して、水平面内及び鉛直面内において回動可能である。第1リンクL1は、基台26から斜め上方に延びている。第3リンクL3の一端側は、第1リンクL1の他端側に固定される。第3リンクL3は、操作者が、操作者の肘62を基台26の下方に配置し、かつ、把持部23を把持した状態において、操作者の前腕61とほぼ平行な方向に延長される。第2リンクL2、第3リンクL3、第4リンクL4及び第5リンクL5は平行リンク機構を構成する。第6リンクL6の一端側は、第4リンクL4の他端側に固定される。把持部23は、第6リンクL6の他端側に、直接又は間接的に取り付けられる。
(もっと読む)
ロボットの直接教示装置
【課題】産業用ロボットによる組立作業のような複雑な動作の教示を行うための直接教示装置に関し、効率よく教示作業が行え、さらに直接教示時のロボットの動作の緩急を反映した作業プログラムを生成できる直接教示装置を提供する。
【解決手段】教示作業者が操作ハンドル4に加える力を力センサ3により検出し、力制御によりロボット1を動作させ、ロボット1の動作を記録することで教示を行うロボットの直接教示装置において、教示中のロボット1の位置と速度を予め設定されたサンプリング時間ごとに収録する収録部10と、収録部10に収録された速度データの変化に応じた間隔で収録部に収録された位置データを抽出してロボット1のパスデータを生成する抽出処理部11と、生成されたパスデータを記憶する記憶部12とを備え、操作ハンドル4は、生成されたパスデータを提示する表示部5を備える。
(もっと読む)
動作支援装置およびその制御方法
【課題】上肢の動作を動作支援時に、皿等の食器や、使用者へのマニピュレータの接触を回避し得る動作支援装置およびその制御方法を提供する。
【解決手段】使用者の上肢の動作を検出する第1検出手段と、該上肢の位置を検出する第2検出手段とを有し、これら各検出手段からの情報によって制御下に作動するマニピュレータを備え、上肢の動作から生成される作動目標速度情報を、マニピュレータの作動空間内に存在する対象物とマニピュレータの作動方向との関係に応じて設定される複数の速度係数から、抽出された第2検出手段の検出に基づくマニピュレータの位置と作動目標速度情報とに対応する速度係数に基づいて補正してマニピュレータを作動させる作動速度情報を生成することで、該上肢の動作を好適に支援するようにした。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】ロボットの手先もしくはワークの進入できない領域である仮想ガイドを設けて、ロボットの手先速度を決定することでワークの位置と姿勢を制御できるパワーアシスト装置を提供する。
【解決手段】複数の関節3aを有するロボットアーム3と、前記ロボットアーム3にフリージョイント4を介して3次元的に揺動可能に接続され、ウィンドウ2を保持する吸着治具5と、関節3a及びフリージョイント4の角度を検出するエンコーダ10と、前記角度に基づいて前記ロボットアーム3の手先3c位置またはウィンドウ2の位置を計算する第一演算部8aと、前記ウィンドウ2の進入を認めない領域である仮想ガイドGを記憶した記憶部8cと、手先3c位置もしくはウィンドウ2の位置を、仮想ガイドGの位置と比較して、仮想ガイドGを越えないように制限をかける速度指令値を算出する第二演算部8bと、前記速度指令値で手先3cを制御する制御手段8と、を備えた。
(もっと読む)
1 - 20 / 41
[ Back to top ]