
Fターム[3C007KT03]の内容
マニピュレータ、ロボット (46,145) | 視覚装置、画像化装置 (2,194) | 複数個のカメラ (366) | 立体視するもの、視差を利用するもの (222)
Fターム[3C007KT03]に分類される特許
1 - 20 / 222
立体視ロボットピッキング装置
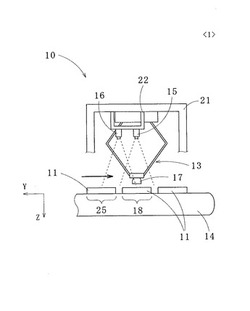
【課題】カメラとワークの間隔が長くなるのを抑制し、ステレオ方式でワークの3次元位置を算出しロボットの吸引部の配置位置を決める立体視ロボットピッキング装置を提供する。
【解決手段】コンテナ11内のワーク12を順次ロボット13によって別位置に移動する立体視ロボットピッキング装置10において、ワーク取出し位置18までコンテナ11を送る移動手段14と、ワーク取出し位置18にあるコンテナ11全体を撮像するカメラ15と、ワーク取出し位置18にあるコンテナ11を部分的に撮像するカメラ16と、カメラ15、16が撮像した各画像中のワーク12をパターンマッチングによって検出して、各画像中でのワーク12の2次元位置を算出する画像処理手段23とを有し、カメラ15、16は、コンテナ11の移動方向に沿って配置され、画像処理手段23は、カメラ15、16の各画像中のワーク12の2次元位置からワーク12の3次元位置を算出する。
(もっと読む)
ピッキング用部品供給装置、および部品ピッキング装置

【課題】
部品供給装置に多数の部品を山積み状態でストックしても、容易かつ確実に部品の山積み状態を変えることが可能な山積み部品供給装置を提供する。
【解決手段】
前記収容容器の底面を構成する容器底部と、収容容器の壁面を形成する円筒形状であって、当該円筒形状の軸を回転軸として前記容器底部に対して相対回転可能な収容容器本体と、前記前記収容容器本体に所定の回転動作をさせる容器本体駆動部と、を備えた。
(もっと読む)
ロボット制御装置、物品取り出しシステム、プログラムおよびロボットの制御方法
【課題】 物品の姿勢がランダムであっても、ロボットを用いて取り出し部位を把持して、物品を取り出す。
【解決手段】 複数の取り出し部位を備える物品の位置・姿勢情報に基づいて、前記複数の取り出し部位にそれぞれ設定された把持方向のうち、所定の方向となす角度が最小となる把持方向を選択方向として選択する方向選択部と、前記複数の取り出し部位のうち、前記把持方向として前記選択方向が設定された取り出し部位を把持して前記物品を取り出すようにロボットを制御する制御部と、を有する。
(もっと読む)
ロボット装置、位置姿勢検出装置、位置姿勢検出プログラム、および位置姿勢検出方法
【課題】平面画像により表現された対象物体の、立体空間における位置および姿勢を高精度に検出する。
【解決手段】対象物体を撮像して画像データを生成する撮像装置11と、撮像装置11を可動に支持するロボット本体12と、リファレンスに対する撮像装置11からの視線方向ごとに、視線方向に対する面のテンプレート画像データとロボット座標系における面の位置および姿勢を表す情報とロボット座標系における撮像装置11の位置および姿勢を表す情報とを有するテンプレート情報を記憶するテンプレート情報記憶部と、撮像装置11が生成した画像データに含まれる対象物体の画像から可視である面を検出し、テンプレート情報記憶部から、可視である面に対応するテンプレート情報を読み込み、テンプレート情報に基づいてロボット座標系における対象物体の位置および姿勢を表す位置姿勢データを生成する位置姿勢データ生成部とを備えた。
(もっと読む)
ピッキング用ワーク供給装置、およびワークピッキング装置
【課題】
バラ積みされたワークの位置と姿勢を確実に変化させ、新たなバラ積み状態を生成するピッキング用ワーク供給装置、および当該ピッキング用ワーク供給装置を用いたワークピッキング装置を提供する。
【解決手段】
ワーク供給装置に、複数のワークをバラ積み可能な上方が開いた容器本体と、前記容器本体の底部から上方内側に進退自在に設けられた突出部と、前記突出部を進退自在に動作させる突出駆動部と、を備えている。
(もっと読む)
マスタ操作入力装置及びマスタスレーブマニピュレータ
【課題】より故障に強い構成で操作部の位置・姿勢を検出することが可能なマスタ操作入力装置及びそのようなマスタ操作入力装置を備えるマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置の入力部に設けられた把持部の位置・姿勢の指令値を、把持部に取り付けられた関節の駆動量を検出するエンコーダの出力信号に基づいて算出するとともに、撮像センサで得られた画像に基づいて算出する。エンコーダの出力信号に従って算出された指令値と撮像センサで得られた画像に従って算出された指令値との間に所定以上の差がある場合にエラー処理を行う。
(もっと読む)
自動ピッキング装置及び自動ピッキング方法
【課題】自動ピッキングを行う際に、ハンド及びピッキング対象部品の破損リスクを低くする自動ピッキング装置を提供する。
【解決手段】部品60の高さ情報を含む視覚情報を取得する計測装置20と、部品20どうしの高さの差が許容値以上になったか判断し、高さの差dが許容値以上である場合には、最上部品60aを移動させる最上部品移動命令を生成する許容差制御装置21と、部品60の位置情報及び姿勢情報を演算する部品位置姿勢情報演算装置22と、最上部品60a又は部品60に対するロボット10を制御するロボット制御信号を生成し、ロボット制御信号によりロボット10を制御するロボット制御装置30と、ロボット10の先端に取り付けられたエンドエフェクタ16を制御するエンドエフェクタ制御信号を生成し、エンドエフェクタ制御信号によりエンドエフェクタ16を制御するエンドエフェクタ制御装置40とを備える。
(もっと読む)
物体把持装置、物体把持装置の制御方法、およびプログラム
【課題】ピッキング時の干渉によるワークの位置姿勢の変動の影響を低減することを目的とする。
【解決手段】複数のワークを含む領域の画像を撮像する撮像部と、複数のワークを含む領域の距離情報を取得する取得部と、画像と距離情報とに基づいて、複数のワークから複数の把持候補ワークの三次元位置姿勢を計測して三次元位置姿勢情報を生成する計測部と、計測部により計測された前記三次元位置姿勢情報に基づいて、把持候補ワークから把持対象ワークを選択する選択部と、把持対象ワークを把持する把持部と、把持部により把持対象ワークが把持されている間に、把持候補ワークの三次元位置姿勢を所定の時間間隔で計測して三次元位置姿勢情報を更新する更新部と、を備え、選択部は、把持部による把持が終了した場合、更新部により更新された把持候補ワークの前記三次元位置姿勢情報に基づいて、次の把持対象ワークを選択する。
(もっと読む)
ロボットセル
【課題】複数のロボットステーションを組み合わせて構築したロボットセルにおいて、各ロボットステーションのスペース効率の改善、タクトの向上、ロボットステーション内の機材の使用効率の改善を目的とする。
【解決手段】ロボットステーションは、一対のロボットアーム101,102と、ロボットアームのワークスペースに対して撮像面を平行に撮像手段を固定するブース104を備える。撮像手段としてのカメラ106の視野を、隣接するロボットステーションのワークスペースである架台の天盤103aまで広げる。さらに、各ロボットステーションに搭載されるロボットアームの可動範囲を、隣接するロボットステーションのワークスペース内に広げる。
(もっと読む)
ロボット制御装置、ロボットおよびロボット制御装置の教示方法
【課題】撮影動作の教示操作が煩雑になるのを抑制することが可能なロボット制御装置を提供する。
【解決手段】このロボットシステム100は、教示位置の入力と、少なくとも教示位置に対応付けられるコマンド情報の選択とを受け付けて教示位置とコマンド情報とを組み合わせた教示データを作成する教示装置3と、教示データに基づいて動作指令を生成する指令生成部24とを備え、教示装置3により選択されるコマンド情報は、教示位置と、予め設定された教示位置に基づく補助的な動作をロボットに動作させるための補助情報とに対応付けられたステレオ視コマンドを含む。
(もっと読む)
シミュレーションシステムおよびそのためのシミュレーションプログラム
【課題】本発明は、作業ロボットが行う作業に求められる作業精度を満たす精度で、取得した画像データから作業対象物の3次元位置・姿勢認識を行い、作業ロボットが当該作業を適切に行うようシミュレーションすることが可能なシミュレーションシステムおよびそのためのシミュレーションプログラムの提供を目的とする。
【解決手段】本発明にかかるシミュレーションシステムは、撮像部20、特に第2撮像部22の倍率設定、フォーカス設定等の撮像パラメータを制御し、作業に要求される作業精度を満たす解像度で画像データを取得することにより、作業対象物10自体の大きさや、作業対象物10と撮像部20との距離に影響されて解像度が低下することを防ぎ、作業対象物10に対する必要な3次元位置・姿勢認識精度を維持することができるので、シミュレーションおよび現実の作業において作業効率の低下や、作業の失敗確率の増大を招くことを抑制できる。
(もっと読む)
ロボットシステムおよびロボット組立システム
【課題】
三次元計測装置を用いて複数種類の部品を把持するのに適したロボットシステムを提供する。
【解決手段】
所定の計測領域の三次元情報を計測する三次元計測装置と、前記三次元情報から対象物の位置姿勢を求める位置姿勢認識装置と、鉛直な第1軸を旋回軸として固定ベースに水平旋回可能に取り付けられた旋回ヘッドによりアームを水平旋回させ、アームの先端に取り付けられた前記対象物を把持するツールの先端の動作領域が前記第1軸を回転軸とする回転体領域である垂直多関節ロボットと、から構成されるロボットシステムであって、動作領域内に第1軸を中心とした一定の角度ごとに複数の作業領域を設定し、ツールが一の作業領域に存在する場合に、前記計測領域が他の作業領域を包含する位置にて前記三次元計測装置の計測部を前記旋回ヘッドに固定する。
(もっと読む)
ロボット及びロボットの異常判定方法
【課題】距離センサに異常があるか否かを判定することができるロボット及びロボットの異常判定方法を提供すること。
【解決手段】本発明にかかるロボットは、距離センサ15と、距離センサ15と離れて設けられた距離検出ユニット21とを備える。ロボットはさらに、距離検出ユニット21の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第1の距離検出手段と、距離センサ15の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第2の距離検出手段と、第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とを比較する比較手段と、前記比較手段の比較の結果、前記第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とが異なる場合に、距離センサ15が異常であると判定する異常判定手段とを備える。
(もっと読む)
ロボット制御装置、物品取り出しシステム、プログラムおよびロボットの制御方法
【課題】 互いに重なり合わないように置かれた複数の物品が完全には分離されていない場合であっても、3次元情報を再取得することなく多関節ロボットを用いて取り出す。
【解決手段】 互いに重なり合わないように置かれた複数の物品をそれぞれ認識して位置および姿勢を算出する認識処理部と、複数の物品からなる第1物品群の重心の水平位置を第1重心位置として算出し、第1物品群のうち第1重心位置から最も離れた物品を取り出し対象の物品として選択する選択部と、第1物品群のうち取り出し対象の物品を中心とする領域に含まれる物品からなる第2物品群の重心の水平位置を第2重心位置として算出し、第2重心位置から取り出し対象の物品の重心の水平位置に向かう方向を水平移動方向として算出する移動方向算出部と、取り出し対象の物品を水平移動方向に所定移動量だけ移動させてから垂直方向に取り出すように多関節ロボットを制御する制御部と、を有する。
(もっと読む)
ロボット及びその制御方法
【課題】対象物を認識しながらアーム等を対象物まで近づけることができる新規なロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1は、頭部11、ロボット本体12、アーム13、カメラ14、物体認識部15、認識空間算出部16、軌道算出部17、可動制御部18を備える。カメラ14は、ロボット本体12の周囲の物体の環境情報を取得する。物体認識部15は、カメラ14が取得した環境情報に基づいて、ロボット本体12の周囲に存在する把持対象物90を認識する。認識空間算出部16は、物体認識部15により把持対象物90を認識するために必要とする空間としての認識空間20を算出する。軌道算出部17は、アーム13が、認識空間20への侵入を回避しつつ、把持対象物90に向かう軌道を算出する。可動制御部18は、アーム13の認識空間20への侵入を回避するように、アーム13の動きを制御する。
(もっと読む)
バラ積みピッキング装置および方法
【課題】メッシュボックス等の容器にバラ積みされた複数のワークから、人による重量物のハンドリング作業なしにワークを1つずつピッキングすることができ、かつ容器内のワーク全体を高い位置精度で計測することができ、距離センサと容器及びワークとの干渉を無くすことができ、これによりピッキング時間を短縮し、ピッキングの成功率と装置の稼働率を高めることができるバラ積みピッキング装置および方法を提供する。
【解決手段】ハンド14によりハンドに距離センサ16を取り付け(S1)、ハンドを移動して、距離センサ16によりバラ積みされたワーク全体の3次元形状データをハンド14で計測し(S2)、かつ計測した3次元形状データからハンド14で把持可能なワーク1の位置と姿勢を認識し(S4)、ハンド14によりハンドから距離センサ16を取り外し、ハンド14により把持可能なワーク1を順に把持して搬送先に搬送する(S6)。
(もっと読む)
作業ロボット用エンドエフェクタ交換装置およびその一部を具える作業ロボット
【課題】取り扱う製品や部品の形状に合ったピッキング用ハンドや、ネジ締めドライバ、半田ごて等の作業ツールを素早く交換することが可能で、かつ位置決め用スタンド等の専用治具を必要としない作業ロボット用エンドエフェクタ交換装置を提供することにある。
【解決手段】各々識別標識を持つ複数のエンドエフェクタと、前記エンドエフェクタを任意の場所に保持するエンドエフェクタ置場と、前記エンドエフェクタ置場に保持された前記エンドエフェクタの前記識別標識を撮像する撮像手段と、前記撮像手段が撮像した前記エンドエフェクタの前記識別標識の画像に基づき前記エンドエフェクタの3次元位置を算出するエンドエフェクタ位置算出手段と、前記算出したエンドエフェクタの3次元位置を作業ロボットの作動制御装置に教示するエンドエフェクタ位置教示手段と、を具えてなる作業ロボット用エンドエフェクタ交換装置である。
(もっと読む)
画像処理装置及び移動体位置推定方法
【課題】周囲の状況に関わらず自己の位置の推定精度を向上させる。
【解決手段】予め周囲地図記憶部11に記憶された移動体の周囲の特徴情報22と当該特徴情報22の位置情報21とを取得し、地図内面構造設定部12が複数の特徴情報22を含む領域の面構造を設定し、地図内特徴点可視性判断部13が、面構造によって、移動体の位置から特徴情報22が撮像不能である場合に、当該特徴情報を可視性がないと判定し、自己位置推定部15が、移動体の周囲の特徴情報22のうち可視性がないと判定された特徴情報22を除いて、取得された特徴情報22及び位置情報21と自己の位置から撮像した撮像画像内の実特徴とに基づいて、移動体の位置を推定する。
(もっと読む)
ワーク段積み状態認識装置
【課題】簡単な設備でワークの段積み状態を正確に認識することができるワーク段積み状態認識装置を提供する。
【解決手段】ワーク段積み状態認識装置1は、ワーク群Wの上方位置から下方を撮像するカメラ装置2と、ワーク群Wの側面に対向して配置されてカメラ装置2に向かってワーク群Wの側面を映す鏡面体6と、カメラ装置2で撮像した画像に基づいてワーク群Wのワーク段積み状態を認識する認識部3を有しており、ワーク群Wの側面を鏡面体6に映して上面と共に上方から撮像することにより、ワークwaの立体形状を正確に認識する。
(もっと読む)
ロボットセル装置及び生産システム
【課題】一対のロボットアームの協調動作可能領域を広くすることができ、作業性のよいロボットセル装置を提供する。
【解決手段】ワークが載置される平面視四角形状の平面8を有する架台1を備える。各ロボットアーム2,3の基端部2a,3aが、架台1の平面8の4隅部8A,8B,8C,8Dのうち互いに対角位置の2隅部8A,8Bのそれぞれに固定される。そして、架台1の平面8上の空間に一対のロボットアーム2,3で協調動作可能な協調動作可能領域が形成される。
(もっと読む)
1 - 20 / 222
[ Back to top ]