
Fターム[3C007KV05]の内容
マニピュレータ、ロボット (46,145) | センサの方式 (946) | 電気式(例;静電容量) (195) | スイッチ(例;リミットスイッチ) (34)
Fターム[3C007KV05]に分類される特許
1 - 20 / 34
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
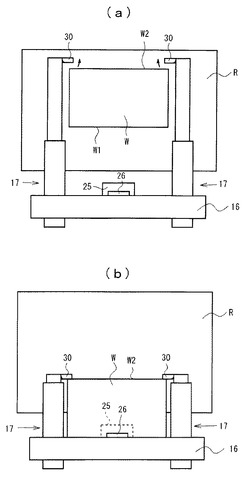
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
ロボットの接触位置を検出するための装置及び方法

【課題】ロボットの接触動作による位置検出の効率と精度を向上させる手段、及び装置を提供する。
【解決手段】作業対象物2と接触する方向に弾性的に変位可能なプローブ4をロボット1の手先効果器周辺に取り付ける。ロボット1が動作している間、プローブ4に印加される外力を力センサ3で検出し、プローブ4の先端位置を計算し(53)、検出された外力と計算されたプローブ位置とをメモリ54に時系列的に記録し、検出された外力からプローブの接触状態を検出し(52)、プローブ接触状態が検出された場合、ロボット1を減速停止させ(51)、記録された外力の微分値の変化からプローブの接触時点を求め、記録された該接触時点におけるプローブの先端位置を作業対象物2の位置として導出する(55)。
(もっと読む)
ロボットの制御装置およびロボットを制御する方法
【課題】ロボットがラフな寄り付きでそのまま精密な作業をすることができるための作業教示データ修正方法、および装置を提供する。
【解決手段】ロボットが行うべき作業対象物に対する作業手順を記憶する作業手順記憶手段と、再生時のロボットと作業対象物との相対的位置及び相対的姿勢が、別の位置及び姿勢となったことを位置・姿勢検出手段によって検出したことに応じて、位置及び姿勢の変化量を獲得し、算出値に基づいて作業手順を修正する作業手順修正手段とを備え、修正される作業手順が、接触状態検出手段によって検出された作業対象物の位置及び姿勢をもとに得られる、ロボットを基準とした座標から作業対象物を基準とした座標への同次変換行列を用いてロボットを基準とした座標上での作業手順として与えられる、ロボットの制御装置。
(もっと読む)
自動溶接装置
【課題】 枝管と母管の溶接個所を溶接トーチで正確に溶接する。
【解決手段】 ロボットハンド12の先端部の旋回台13に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付け、その反対側に探触子14を設ける。ロボットコントローラ19に、探触子14に接続したタッチセンサ16の接触検出信号を入力可能とし、更に外部の制御装置20を接続する。ロボットコントローラ19で多関節ロボットを制御して枝管溶接機4の馬蹄型ガイド5を溶接対象の枝管2aに外嵌させるときに、制御装置20により、馬蹄型ガイド5と予め探触子14で検出した溶接対象の枝管2aの位置のずれ量を求め、このずれ量を解消するための馬蹄型ガイド5の位置補正量を求めてロボットコントローラ19へ与えることで、馬蹄型ガイド5を外嵌させた溶接対象の枝管2aを、溶接トーチ11の円周動作の軌道の中心に配置させる。
(もっと読む)
作業マニピュレータのセンシング動作生成方法、センシング動作生成装置及びセンシング動作生成プログラム
【課題】実際の作業ワーク情報と教示データとの誤差が大きい場合でも、適切なセンシング動作の自動生成をして、センシング動作データの修正、再設定作業の負荷を軽減する。
【解決手段】作業ワークWに接触可能な接触式センサ3を備えた作業マニピュレータ2がセンシング動作を行う際に用いられるセンシング動作データを生成する。作業マニピュレータ2の接触式センサ3が作業ワークWに接触するセンシング姿勢Sにおいて、接触式センサ3が接触する作業ワークWの接触面Tを抽出すると共に、この接触面Tを構成する一つのエッジEを選択し、選択された一つのエッジEの位置と、接触式センサ3の基端3b側に設定した設定位置6を接触面Tに射影した位置WPとが一致するように、作業マニピュレータ2のセンシング姿勢Sを再設定し、再設定されたセンシング姿勢Sを含むように作業マニピュレータ2のセンシング動作データを生成する。
(もっと読む)
移動ロボット
【課題】 移動ロボットのボディが物体に接触した場合を直ちに検知できるとともに、物体と移動ロボットとの接触で作用する力を緩衝することができる移動ロボットを得る。
【解決手段】 移動ロボット本体部の少なくとも下部の周囲を覆うカバーと、カバーの上部を移動ロボット本体部のフレームに、該カバーの面方向において可動に取り付けるカバー上部支持部と、前記カバーの下部を移動ロボット本体部のフレームに、弾性支持するカバー下部支持部と、前記カバーの変位を検出することで、移動ロボットが物体へ接触したことを検知する検知部とを有する。
(もっと読む)
把持装置
【課題】変形し易く強度が弱い段ボール箱のようなワークの変形を最小、確実に保持し、ワーク寸法に応じて確実にワークを把持することのできる把持装置を提供。
【解決手段】把持装置1は、ロボットのアーム先端22に取り付けられた水平角枠2と、短辺側から垂下し把持平面4を有する固定把持部3と、他方側に移動部5と、移動部から垂下する把持平面7を有する移動把持部6と、移動部に設けられた検出移動部9と、検出移動部を付勢するスプリング12と、検出移動部から垂下する接触平面11を有する検出板10と、検出板の接触平面と把持部の把持平面との差が所定量以下になった時に信号を出力する検出器13と、を設け、さらに、移動及び固定把持部の下部に互いに相手側方向に延出する爪3e,6eを設けた。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】設置後の微調整を自動的に行うロボット装置であって、操作者の熟練を要せず、作業対象との距離や作業対象の傾きについて正確に補正でき、また、ロボット装置の設置位置が所定の位置から大きくずれていても位置補正が行えるロボット装置を提供する。
【解決手段】作業対象が設置される平面102と同一平面上の一直線上にない3箇所の接触点102a,102b,102cにマニピュレータ1の手先を接触させ接触点102a,102b,102cの位置を検出し、この位置に基づいて平面102の傾き及び高さ位置を計測し、マニピュレータ1の手先の撮像手段6の光軸を平面102に垂直として平面102上のマーカ103を撮像し、撮像されたマーカ103の画像を画像処理してマーカ103の位置及び回転方向を計測し、次に、平面102の傾き、高さ位置、平面102上におけるマーカ103の位置及び回転方向に基づき、マニピュレータ1を制御する。
(もっと読む)
ロボットハンド装置
【課題】ワーク置き場にワークを置く際に、ワークが受ける衝撃を小さくすることができ、かつ電気的構成が簡単なロボットハンド装置を提供することを課題とする。
【解決手段】ロボットハンド装置1は、アーム部2とハンド部3とワーク置き場4とを備えており、ワークWを所定の場所からワーク置き場4まで搬送する搬送モードと、ワークWを解放しワーク置き場4に置く載置モードと、に切り替え可能である。ロボットハンド装置1は、アーム部2、ハンド部3、ワーク置き場4、ワークWのうち、少なくとも一つを導通経路とする電気回路50を備えている。載置モードにおいては、ハンド部3に把持されたワークWがワーク置き場4に既に置かれているワークWに接触することにより、電気回路50が導通し、電気回路50の導通をトリガーとして、ハンド部3がワークWを解放する。
(もっと読む)
ロボットフィンガ及びこれを備えるロボットハンド
【課題】ワークを把持し易いロボットフィンガ及びロボットハンドを提供する。
【解決手段】本発明に係るロボットフィンガ3は、ワーク40を把持するための指本体6と、該指本体6の先端から突出するよう設けられた接触部材10とを備え、指本体6に、その先端の一部から接触部材10の突出方向に延びる突出部31が設けられている。
(もっと読む)
ロボット制御装置
【課題】位置ずれ検出動作において接触検出後のロボット停止動作を滑らかにする。
【解決手段】ロボットRに取り付けられた作業ツールTによってワークWの位置ずれを検出するための指令位置を算出する指令位置生成部2と、指令位置に基づいて作業ツールTを移動させる駆動制御部3と、作業ツールTがワークWへ接触したことを検出して停止信号Tsを出力する停止処理部8と、作業ツールTがワークWへ接触したときの接触位置Dvを記憶する接触位置算出部7と、位置ずれ量を算出して教示データTdを補正する位置補正部9と、を備える。停止信号Tsの入力により、駆動制御部3が認識している作業ツールTの現在位置を接触位置Dv、指令位置生成部2が出力している指令位置を惰走位置Svとして作業ツールTを惰走位置Svから接触位置Dvへ逆送させる惰走距離補正経路を算出し、本来の接触位置Dvで停止する。
(もっと読む)
揺動開閉チャック
【課題】把持用フィンガーに対する摺動抵抗が低減して小型のシリンダーを使用してチャック自体を小型化及び軽量化してチャックの高速移動を可能にすると共に狭小空間内に対して容易に進入させることを可能する。偏平なピストンでシリンダーを構成することによりシリンダーの厚さ(高さ)を低減してチャック自体を薄型化すると共に小型化及び軽量化する。
【解決手段】シリンダー部材の非作動時には、各ピストン13a,13bは、弾性部材9の弾性力により付勢されて互いに近づく方向へ揺動する各把持用フィンガー5の作動部5bに当接する押圧部材15a,15bにより互いに近づく方向へ移動される。シリンダー部材11の作動時には、各ピストンは、供給される流体の圧力により押圧部材を互いに遠ざかる方向へ移動して各作動部を、弾性部材の弾性力に抗して押圧し、各把持用フィンガーを把持部5a相互が互いに近づく方向へ揺動させてワークを把持する。
(もっと読む)
揺動開閉チャック
【課題】把持用フィンガーに対する摺動抵抗を低減して耐久性を高めることができる。小型のピストンで高い把持力を得ることができ、チャック自体を小型化することができる。把持用フィンガーを多段動作で開閉することにより高い把持力を得ることができる。
【解決手段】作動部材の作動に伴って移動するカム部材の第1傾斜部を摺接するボール部材により作動部を弾性部材の弾性力に抗して互いに離間する方向へ押圧して把持用フィンガーを、把持部によるワークの把持が可能な位置まで揺動した後に、続いて第2傾斜部を摺接するボール部材により作動部を更に互いに離間する方向へ押圧して把持用フィンガーを、把持部がワークを把持する位置へ揺動する。
(もっと読む)
溶接ロボット
【課題】 溶接ロボット等の溶接ロボットに位置計測ユニットが取り付けられたとしても、位置計測ユニットが取り付けられていない従来と同様のロボット姿勢にて干渉なく作業を行なえるようにして、既存のロボットプログラムを変更することを回避する。位置計測ユニットが外部の部材と干渉したとしても確実に溶接ロボットの動きを停止させる。
【解決手段】 溶接トーチ20にブラケット14が固定されている。そして、ブラケット14は、位置計測ユニット30の筐体31を構成するように形成されている。ブラケット14には、当該ブラケット14を介して加わる外力を検出するショックセンサ80の検出部81が取り付けられている。
(もっと読む)
移動型ロボットの充電装置
【課題】配線部材を用いて充電中も移動型ロボットを左程の制約を受けることなく動かすことができるようにすると共に、配線部材の損傷といった不具合の発生も防止できるようにした移動型ロボットの充電装置を提供する
【解決手段】充電用電源3と、充電用電源2を制御する制御基板4と、充電用電源4からの電力を移動型ロボット1のバッテリ1bに給電する、移動型ロボット1に接続されて該ロボットに連れ動きする配線部材5とを備える。また、配線部材5の引張りを検出する検出器7を設ける。配線部材5が引張られたときは、引張り検出器7からの信号で移動型ロボット1を停止させたり、配線部材5をロボット1から離脱させる等の適宜の対策を講ずる。
(もっと読む)
原点位置設定装置、原点位置設定方法、リンク機構及び脚車輪型ロボット
【課題】関節部を介して回動自在に支持されたリンクの原点位置を設定するのに好適な原点位置設定装置、原点位置設定方法、リンク機構及び脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1及び第2リンク17及び19と共に回動するドグ200と、第1及び第2リンク17及び19の基準回転角度位置へと回動したドグ200を検出する基準位置検出センサ210と、第1及び第2リンク17及び19の時計回り方向の限界回転角度位置の近傍へと回動したドグ200を検出する限界位置検出センサ220とを備え、第1及び第2リンク17及び19をその初期位置から最初に時計回り方向に回動させると共に、仮の原点位置を検出する際のドグ200の基準位置検出センサ210の検出位置への進入方向を揃え、更に、仮の原点位置と、その検出範囲と、エンコーダ42の発生するパルス信号とに基づき原点位置を設定する。
(もっと読む)
原点位置設定装置、原点位置設定方法、リンク機構及び脚車輪型ロボット
【課題】関節部を介して回動自在に支持されたリンクの原点位置を安定的且つ高精度に設定するのに好適な原点位置設定装置、原点位置設定方法、リンク機構及び脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボットは、第1及び第2リンク17及び19と共に回動するドグ200と、第1及び第2リンク17及び19の基準回転角度位置へと回動したドグ200を検出する基準位置検出センサ210と、第1及び第2リンク17及び19の時計回り方向の限界回転角度位置の近傍へと回動したドグ200を検出する限界位置検出センサ220とを備え、第1及び第2リンク17及び19をその初期位置から最初に時計回り方向に回動させると共に、仮の原点位置を検出する際のドグ200の基準位置検出センサ210の検出位置への進入方向を揃え、更に、仮の原点位置と、その検出範囲と、エンコーダの発生するパルス信号とに基づき原点位置を設定する。
(もっと読む)
表面に情報表示および相互作用機能を備える可動装置
【課題】表面に情報表示および相互作用機能を備える可動装置を提供する。
【解決手段】表皮ユニット11が可動本体10表面に貼設されることによってケーシングに情報を表示することができ、ソフトウェアの制御によって外皮の色、図案または文字情報を随時変化させることができる。可撓性ディスプレイ110には更にタッチセンサユニット112を設置することができ、入力される相互作用信号を感知できる。可動本体10には環境センサまたは情報識別装置を整合でき、有線または無線の技術によって環境情報、文字情報または画像音声情報の判断を入力信号とし、複数の入力信号と出力表現信号とを整合して可動本体10の相互作用性を高めることができる。
(もっと読む)
物品把持装置
【課題】段積みされたコンテナ6の中心O1とハンド4の中心O2との位置がずれている場合でも、簡単に修正して把持できるようにする。
【解決手段】ロボットハンド4に一対のグリッパ12、13を設け、これらグリッパ12、13をそれぞれエアシリンダ14、15によってコンテナ6を把持する位置と開放する位置とに移動可能とし、グリッパ12、13が把持する位置に移動したことを前記エアシリンダ14、15に設けた近接センサ16、17によって検出できるようにする。一対のグリッパ12、13を、コンテナ6を把持する位置に移動させた際に、いずれか一方のシリンダ14または15から検出信号が得られない時には、ロボット2の動作により、ハンド4を信号の得られなかったシリンダ14または15側へ移動させて、両センサ16、17から信号を得られるようにする。
(もっと読む)
過負荷検出装置
【課題】ロボットの通常動作を良好に保つことができる過負荷検出装置を提供する。
【解決手段】相互の軸芯10a,11aが平行になるように相互に離間した第1及び第2のベース部材10,11を備え、これらベース部材10,11間にそれらの軸芯10a,11a方向に対して直交する方向に規定以上の力が加わった場合、凹部10dに押される嵌合部材15がハニカム構造体16を変形させて凹部10dから抜ける方向へ移動し、これに伴い、ベース部材10,11同士が軸ずれし、この軸ずれを非接触型センサ18で検出する。ベース部材10,11同士は、ベース部材10,11同士の近接移動を規制する球体12及びベース部材10,11同士の離反移動を規制する離反移動規制部材13によって連結され、ベース部材10,11同士の間隔が維持される。
(もっと読む)
1 - 20 / 34
[ Back to top ]