
Fターム[3C007KW00]の内容
マニピュレータ、ロボット (46,145) | センサ (216)
Fターム[3C007KW00]の下位に属するFターム
Fターム[3C007KW00]に分類される特許
1 - 20 / 36
水平多関節ロボット
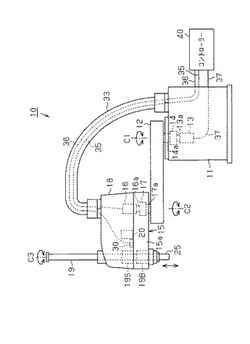
【課題】角速度センサーを用いて制振制御を行う水平多関節ロボットにおいて、該角速度センサーに接続される電気配線の耐久性を高めることの可能な水平多関節ロボットを提供する。
【解決手段】ロボット10は、第2水平アーム15に設置され基台11に対する第1水平アーム12の角速度を得るための角速度センサー30を備え、第1水平アーム12の角速度に基づく第1モーター13の駆動によって第1水平アーム12を制振する。ロボット10は、基台11と第2水平アーム15とに端部が連結されるとともに、第1水平アーム12の外側、且つ第2水平アーム15の外側に配設されて、基台11内と第2水平アーム15内とに通じる通路を有する配線ダクト33に、第2水平アーム15に内蔵された第2モーター16に接続される電気配線35と、角速度センサー30に接続される電気配線36とが引き回されている。
(もっと読む)
仰角方向の音源知覚可能な耳介装置

【構成】 耳介装置(10)は、縦長矩形の平板状基体(12)を含み、基体には、縦長矩形の凹部(14)が形成され、凹部の内側面に、最下段から最上段に向かうにつれて凹部の開口側へ段々にせり出すような、3段の段面(16a-16c)によって階段部(16)が形成される。最下段の段面(16a)の所定位置を観測点とし、そこにマイクロフォン(18)を設けた。
【効果】頭部伝達関数において実際の耳介と同様のピーク/ノッチパターンを確認した。したがって、仰角方向の音源定位が可能であり、そのような耳介装置は簡単な形状、構造である。
(もっと読む)
角速度センサーの補正方法
【課題】キャリブレーションを行う手間をかけることなく補正を行うことで、角速度センサーの検出値を正確に得ることが可能な角速度センサーの補正方法を提供する。
【解決手段】リンク3の一連の動きにおいて、角度センサー6がアクチュエーター4の回転角を検出する回転角検出工程と、回転角検出工程の後に演算部15が回転角を微分して基準の角速度を算出する基準の角速度演算工程と、回転角検出工程と同じ工程で、角速度センサー12が基体1に対するリンクの角速度を検出するリンクの角速度検出工程と、基準の角速度演算工程の後に、リンクの角速度が基準の角速度に近づくように補正するリンクの角速度補正工程と、を有する。
(もっと読む)
ロボット
【課題】駆動部や腕部が振動するときにも角速度検出部が振動し難いロボットを提供する。
【解決手段】第1腕部8と、第1腕部8を回転させる第1モーターと、第1腕部8が回転する角速度を検出する第1角速度センサー26と、第1腕部8から第1角速度センサー26に伝わる振動を減衰させる減衰容器23及び減衰容器蓋部23aと、を有する。そして、減衰容器23及び減衰容器蓋部23aは減衰部材を有し、減衰部材が第1腕部8と第1角速度センサー26との間に配置される。
(もっと読む)
ロボット制御装置、ロボットの制御方法
【課題】ロボットの不要な回避動作を低減し、動作効率の向上を図る。
【解決手段】駆動プログラムに従ってロボットを駆動させるロボット制御装置であって、前記ロボットの動作方向を示す動作線と、ある地点における前記ロボットと障害物とを結ぶ仮想直線とで成す角度を取得する角度取得部と、取得した前記角度と所定の角度基準値との比較結果に基づいて、前記ロボットの駆動を制御する制御部と、を備えたことを特徴とする。
(もっと読む)
移載機
【課題】フォークに光センサの配線をすることなくワークの有無を検知することができる移載機を提供すること。
【解決手段】屈伸可能に連結された第1アーム1及び第2アーム2を左右に1対配設し、第1アーム1の基部をそれぞれ駆動軸3に接続するとともに、第2アーム2の先端部でフォーク4を支持し、各アーム1、2の屈伸によりフォーク4を進退するようにした移載機において、フォーク4上のワークWの有無を検知する光センサ10を移載機本体7に設けるとともに、フォーク4上のワークWの有無によって開閉する遮光板12と、その作動機構13からなるシャッタ機構を有するミラー11を配設し、光センサ10の光をミラー11に反射させることによりワークWの有無を検知できるようにし、かつ、光センサ10をミラー11が通過する経路から外れた位置に取り付ける。
(もっと読む)
細径アクチュエータ
【課題】本発明の目的は、偏荷重による細径アクチュエータの屈曲を防止し、高精度な制御が要求される細径の医療用または工業用マニピュレータを実現するための細径アクチュエータを提供することにある。
【解決手段】本発明は、第1および第2のセンサ部により構成された折り返し構造を有する変位センサを具備し、第1のセンサ部がアクチュエータの中心軸に対して平行に配置され、第2のセンサ部が第1のセンサ部の各位置から前記中心軸に対して垂直に交わる線分上で前記中心軸に対して軸対称となるように配置されることにより、偏荷重の発生を抑制したことを特徴とする、細径アクチュエータを提供する。
(もっと読む)
ビートトラッキング装置、ビートトラッキング方法、記録媒体、ビートトラッキング用プログラム、及びロボット
【課題】雑音に対するロバスト性を確保するとともに、テンポ変動への追従性及びテンポ推定の安定性を確保する。
【解決手段】音楽音響信号MAから自己音声信号SVの音声成分をエコーキャンセルした音響信号にフィルタ処理を行い、オンセットを強調したオンセットベクトルを出力するSobelフィルタ部21と、オンセットベクトルに正規化相互相関関数を用いた時間周波数パターンマッチングを行ってビート間隔信頼度を求める時間周波数パターンマッチング部22と、ビート間隔信頼度に基づいてビート間隔を推定してテンポTPを出力するビート間隔推定部23とを備えた。
(もっと読む)
ヒータ兼温度センサ素子と、これを用いた気流センサ及び真空パッド、及び導電膜付チューブ並びに気流検知装置
【課題】温度センサを自己加熱によりヒータとしても動作させる超小型で高速応答の安価なヒータ兼温度センサ素子を提供する、この素子を用いた高速で高感度の気流センサを提供する、この気流センサを真空パッドに適用して高速応答にする。さらに、これらを用いた気流検知装置を提供する。
【解決手段】基板から熱分離したカンチレバ状の薄膜にヒータ兼温度センサを形成し2端子とする。そのチップ寸法を1mm角程度の超小型化する。気流センサとして気流の流入口近傍の微小空間にヒータ兼温度センサ素子を取り付ける。これを真空パッドに適用し、素子を吸着パッド付近に取り付ける。内側と外側に導電膜を形成した導電膜付チューブを提供して電源回路などを有する本体と気流センサとの間の煩雑なワイヤ線を不要にする。更にこの気流センサを用いて、少なくとも増幅回路、演算回路、制御回路を有するコンパクトな気流検知装置とする。
(もっと読む)
校正ロボットシステム及び距離センサの校正方法
【課題】距離センサを装備しているロボットの定期検査、出荷試験におけるセンサ精度の保証、校正の実施に際し、管理者の負荷を軽減し、また、高額な試験治具などを使うことなく効率的に校正を行うシステム及び方法を提供すること。
【解決手段】校正ロボットは被校正ロボットに対し、両ロボット間距離が指定した距離になるよう移動を指示する。移動後の両ロボット間の距離を各々計測し、被校正ロボットは校正ロボットの計測距離と自ら計測した距離の値より距離センサを校正する。従い、校正のためにロボット操縦用の新たな装置、あるいは操縦用の外部機器を使用せずに実施できる。
(もっと読む)
射影変換収束演算処理方法
【課題】2つのカメラの撮像画像内の物体の平坦部を観測するために、それらの撮像画像間の射影変換を利用した収束演算処理を行なう方法において、その収束演算処理の収束性を確保しつつ、演算負荷を軽減する。
【解決手段】収束演算処理における射影変換行列の所定種類のパラメータ(n(i),d(i))の初期値(n0(i),d0(i))により規定される平面πa(i)が、観測対象の物体の平坦部を包含する実際の平面に対して傾斜した平面になることを該初期値(n0(i),d0(i))が満たすべき制約条件とし、該初期値(n0(i),d0(i))を該制約条件を満たす値に設定する。
(もっと読む)
超音波検査システム
【課題】正確なアライメントを必要とせず、検査物体の硬さや重さに関する情報を取得することができる超音波検査システムを供給する。
【解決手段】超音波送受波器1から広帯域変調波を検査対象物体11に送波し、検査対象物体11にラム波を励起する、ラム波3は円筒形状の検査対象物体11を円周方向に周回し、超音波受波器2によってラム波3周回周期に同期した周期性をもった受信信号が獲られる。これらの周期性を解析することによって、ラム波の伝搬速度が推定され、検査対象物体11の硬さ、重さなどが推定される。
(もっと読む)
ロボット装置及び形状認識方法
【課題】腕部を有するロボットにおいて、周囲環境に依存しない方法で把持対象物の三次元形状の認識を行うロボット装置を提供すること。
【解決手段】本発明の一態様に係るロボット装置10は、頭部11と、頭部11に連結された腕部13と、腕部13に設けられ、ワークWの上面を撮像する手先カメラ15と、頭部11に設けられた頭部カメラ12と、手先カメラ15によって撮像したワークWの画像に基づいて、手先カメラ15の移動経路を計画する算出部とを有し、移動経路に沿って移動する手先カメラ15によって撮像された画像と、頭部カメラ12によって撮像された画像とに基づいてワークWの三次元形状を認識するものである。
(もっと読む)
音声認識ロボット
【課題】音声認識ロボットの音声取得部のチューニングを効率良く行う。
【解決手段】音声認識ロボット100は、音声取得部として機能するマイクロホンアレー180と、音声出力部として機能するスピーカ170と、スピーカ170が装着されるロボットアーム160と、マイクロホンアレー180に対してチューニングを行うチューニング部を備える。チューニング部は、チューニングに際し、スピーカ170に基準音声を出力させるチューニング制御部と、基準音声に対する音声取得部の応答を用いてチューニングを実行するチューニング実行部とを有する。
(もっと読む)
ワーク識別装置及び識別方法
【課題】 コンベアに投入される多品種のワークを誤りなく識別するための識別装置及び識別方法の提供。
【解決手段】 コンベア(4)搬送方向におけるワーク(4)の移動を制止する制止装置(6)と、ワーク(4)の表面までの距離を計測する計測装置(8)と、その計測装置(8)をコンベア(2)搬送方向と平行な方向に移動する移動装置(5)と、制御装置(14)とを有し、その制御装置(14)は、移動装置(10)により移動しながらワーク(4)表面までの距離を計測した計測装置(8)の出力から、計測装置(8)で計測されたワーク(4)表面の盲孔(16)の有無とその位置を決定するように構成されている。
(もっと読む)
動作検出センサ及びアクチュエータシステム
【課題】電気的なセンサとは異なる構造によってアクチュエータの動作を検出できる動作検出センサを提供する。
【解決手段】変形動作するバルーンアクチュエータ12に検出用流路2が設けられている。検出用流路2は、動作するバルーンアクチュエータ12の動作に応じて変形することで、通過させる流体の流路抵抗が変化する。そして、流路抵抗の変化による前記検出用流路2を通る流体の流量の変化を測定手段3が測定する。
(もっと読む)
外力検知方法およびマニピュレータ制御方法
【課題】マニピュレータの表面全体をセンサ部で覆うことなく、マニピュレータに物体が干渉することでアーム部に作用する外力を検知可能なマニピュレータの外力検知方法等を提供する。
【解決手段】固定リンク部材を含む複数のリンク部材から構成されるアーム部と、アーム部に固定されたハンド部を備えるマニピュレータにおいて、固定リンク部材に作用する第1の作用力の大きさとハンド部に作用する第2の作用力の大きさを検出し、作用力の検出箇所の位置姿勢を算出し、固定リンク部材・ハンド部の質量と動作により生じる慣性力から作用力の推測値を求め、この作用力から推測値を減算し作用力の補正値を求め、作用力の検出時の位置姿勢に基づきアーム部に外力が作用していない場合の固定リンク部材・ハンド部における作用力の関係から補正値が外れている場合にアーム部に外力が作用したと判断する。
(もっと読む)
人工耳を有するロボットヘッド
【課題】人工耳を有するロボットヘッドを提供すること。
【解決手段】ヘッドは、それぞれ耳介形状の構造体およびマイクロフォンを備える人工両耳を指示する。聴覚の位置測定手掛りを高めるために、ヘッドの少なくとも上側部分は音響的減衰表面をもたらす。
(もっと読む)
センサの回転制御方法及び障害物回避方法
【課題】従来技術では、移動装置近傍に3次元センサの検出領域に死角が存在し、過去に測定されたことのある障害物が死角に入った場合は、過去の障害物の位置情報と移動装置の移動情報から現在の障害物の位置を予測しているため、移動装置近傍に存在する障害物の急な変化や移動装置近傍への障害物の出入りなどには対処できない恐れがある。
【解決手段】移動装置周辺の環境をセンシングするセンサが180度の正逆の回転運動を繰り返す2軸以上の回転機構を有することで、移動装置近傍においても予測を用いることなく移動装置周辺の環境を検出することができ、移動装置の進路上の障害に対してリアルタイムに検出することができる。
(もっと読む)
移動量検知装置
【課題】移動量を精度よく検出すること。
【解決手段】移動体に搭載されて床面を撮像する第1および第2撮像部と、第1および第2撮像部によって撮像された画像データを用いて移動体の移動量をそれぞれ第1および第2移動量として算出する画像解析部と、第1および第2移動量のいずれかをその信頼度から真の移動量として判別する制御部とを備え、第1および第2撮像部は異なる被写界深度を有することを特徴とする。
(もっと読む)
1 - 20 / 36
[ Back to top ]